
-
자율주행 자동차에서 카메라 한 대가 튀어오른 돌에 맞고 고장나면, 자율주행이 가능한가? 아무래도 위험이 커지겠지? 그럴 땐 운전자가 제어하도록 전환하면 되겠지. 그런데, 자율주행 레벨 5단계는 운전대도 없애는 수준이잖아. 그럴 땐 그냥 갓길에 멈춰버려? 이건 빗물이나 강한 햇빛에 가려져 제 역할을 못하는 경우와도 연결되는 문제겠구나.
-
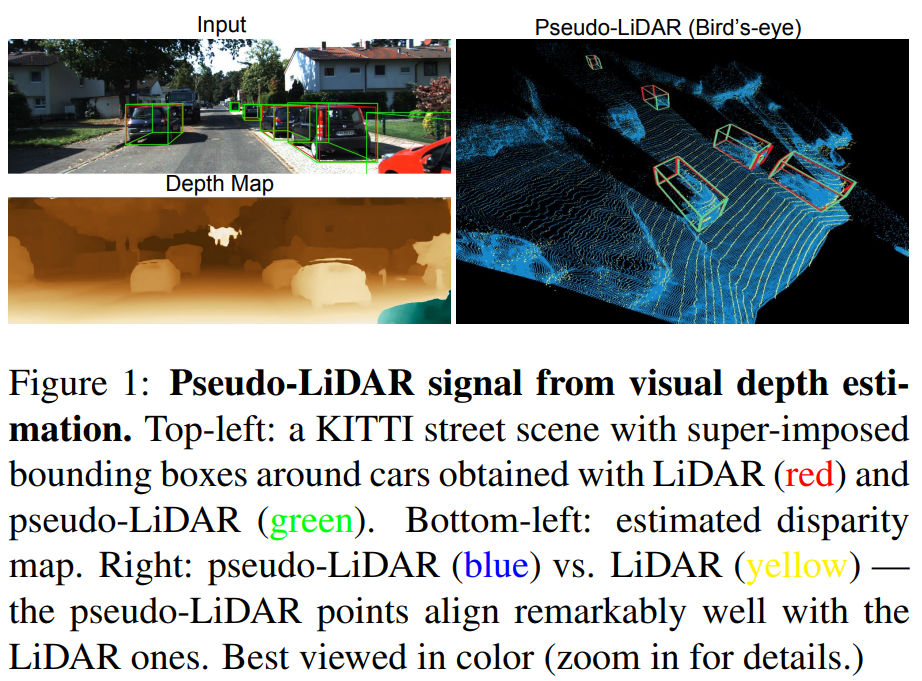
라이다는 거리, 속도, 가속도, 모양 등의 측정값을 제공한다. 카메라는 이들의 추론값을 제공한다. 라이다를 대체하려는 세상에서는 Depth Estimation이 노다지이지 않을까? 아니면 Visual SLAM이려나? 픽셀 수준의 깊이 추정이 가능할까? 깊이 추정이 필요할까? 앞 차량이 멀리 있는 이미지와 바로 앞에 있는 이미지에서 깊이를 추정할 필요 없이 그냥 주행, 정지로 학습시키면 되는 거 아니야? 자율주행에서 5m 등 정확한 거리 측정은 안전과 직결되기 때문에 꼭 필요하다고 하네. 아래[Pseudo-LiDAR from Visual Depth Estimation: Bridging the Gap in 3D Object Detection for Autonomous Driving (2019)]는 이미지의 깊이 추정을 바탕으로 3D Map을 구현한 것으로 그 결과물이 라이다와 비슷해보인다.

JUST DO IT.