Week 10-1. SVM (Support Vector Machine)
Theory and Intuition: Hyperplanes and Margins
Hyperplane
: a flat subspace (N-1 dimension) that divides a higher dimensional space (N dimension)into two parts
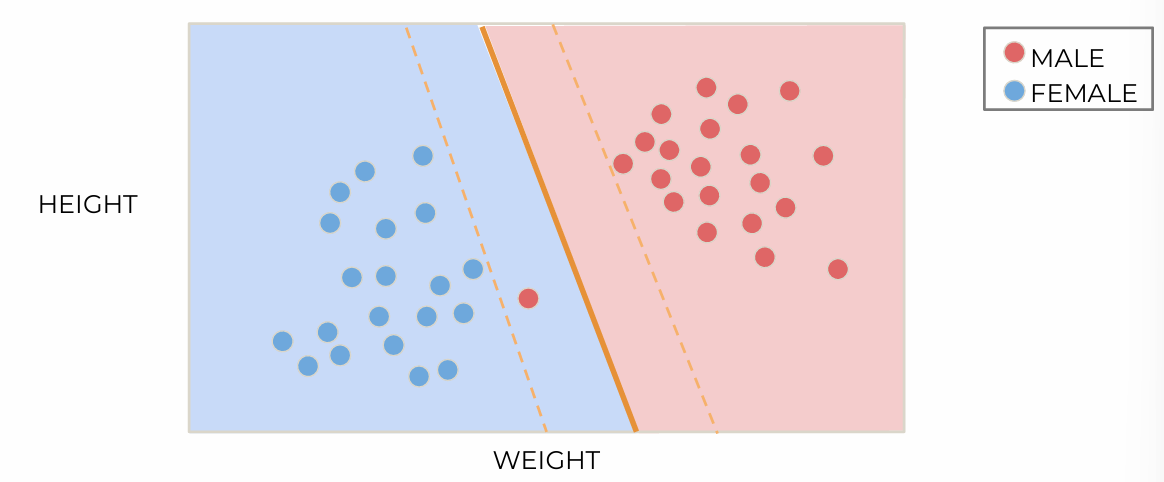
create seperation between classes
when new point, use hyperplanes to assign a class
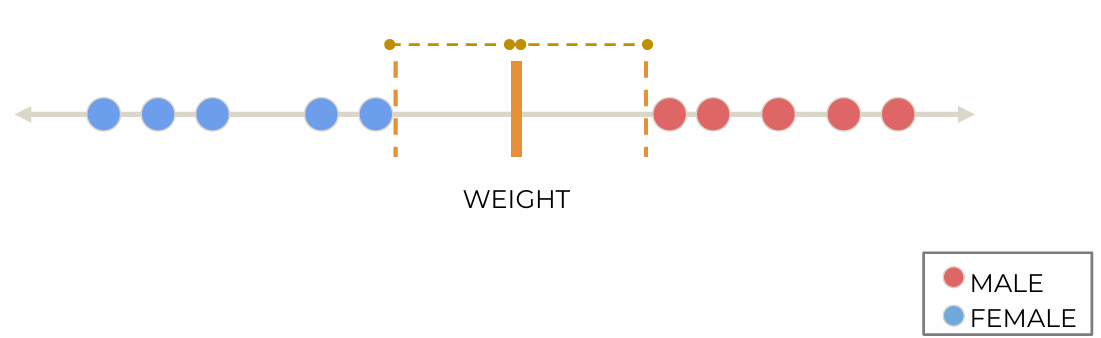
Example: a dataset with one feature, one binary target label
create seperating hyperplane
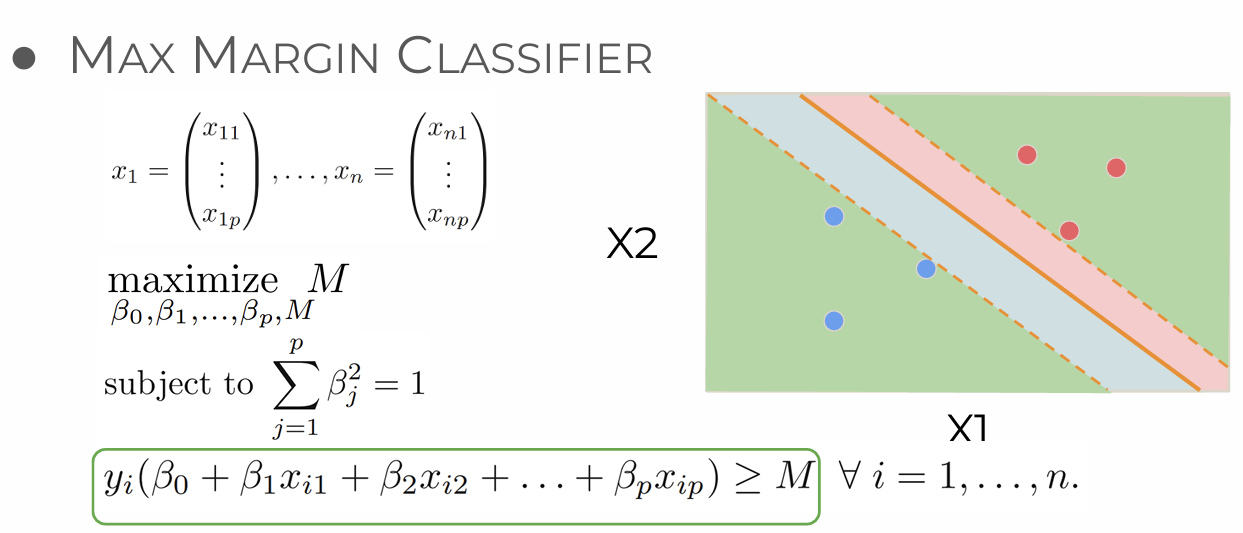
maximize the margin(여백) between the classes; maximal margin classifier
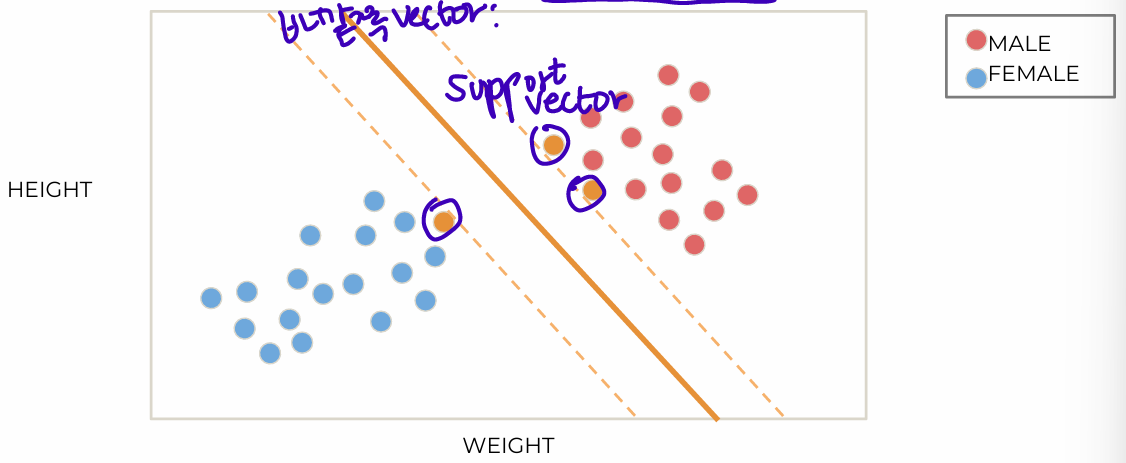
2D data, support vector
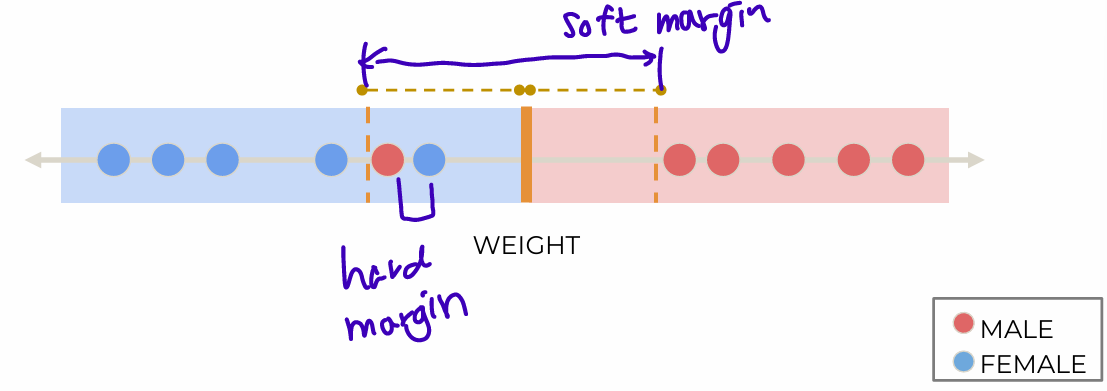
- Not perfectly seperable: misclassification exists
Bias-variance trade-off
variance: overfitting, bias: underfitting - soft margin
Cross validation to determine the optimal size of the margin
Theory and Intuition: Kernels
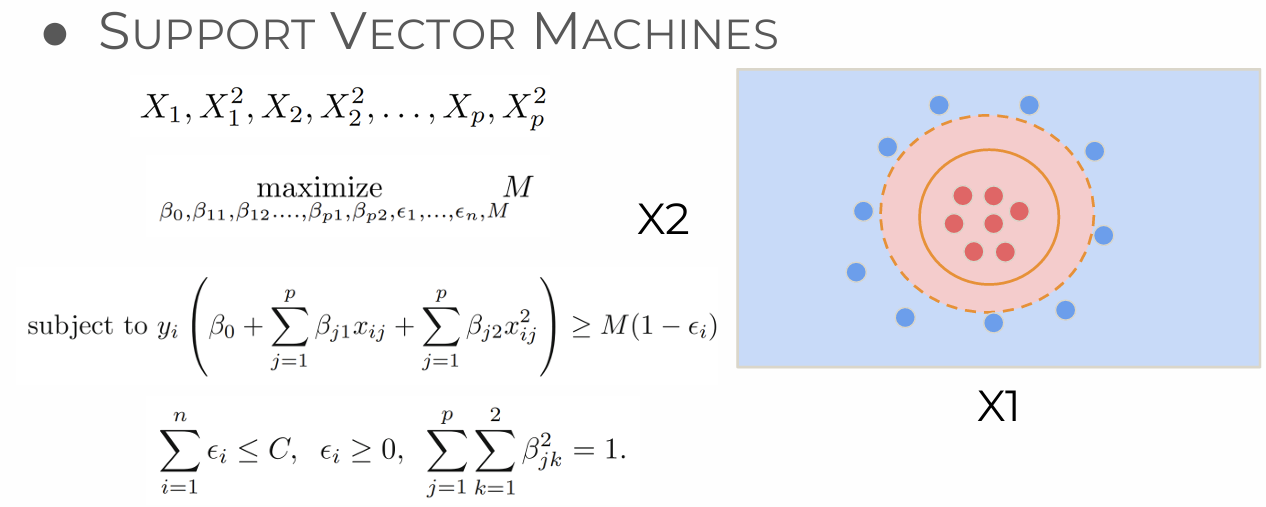
When hyperplane performs poorly, move from Support Vector Classifier to Support Vector Machines
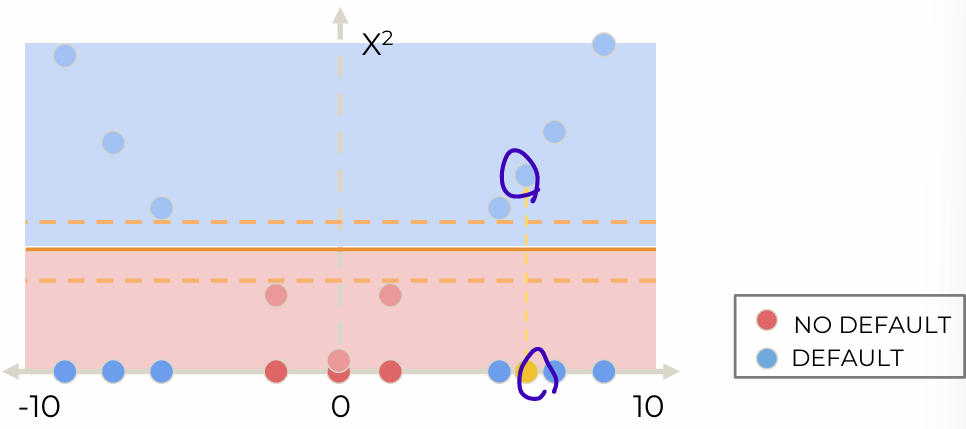
Kernels are used to project the features to a higher dimension
- Kernel Projection 1D
Mathematics
- Linear classifier: finding optimal solution
• Maximizes the distance between the hyperplane and the “difficult points” close to decision boundary
• One intuition: if there are no points near the decision surface, then there are no very uncertain classification decisions
equation of n-dimensional hyperplane:
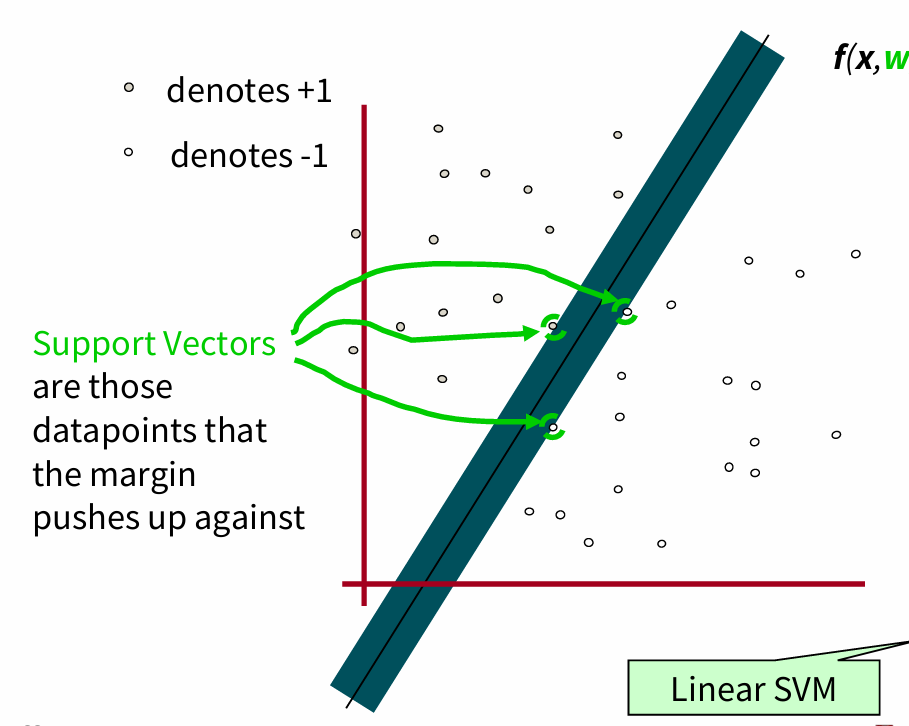
Support Vectors: Intuition
:traing data points closer to the border which are most crucial to design the classifier
To chose a good line: optimize some objective function
Primarily we want least number of misclassification of test points, points closer to boundary more likely to be misclassified
Support Vector Machine(SVM)
:maximum margin classifier
are lines defined by the support vectors
margin: seperation between the lines
The decision boundary is the line that pass through the middle of and .
- another intuition: fat seperator between class, less choices, decreased capacity of the model
Linear Classifiers
f(x, w, b) = sign(wx - b)
Define the margin of a linear classifier as the width that the boundary could be increased by before hitting a datapoint.
Maximum margin linear classifier(LSVM)
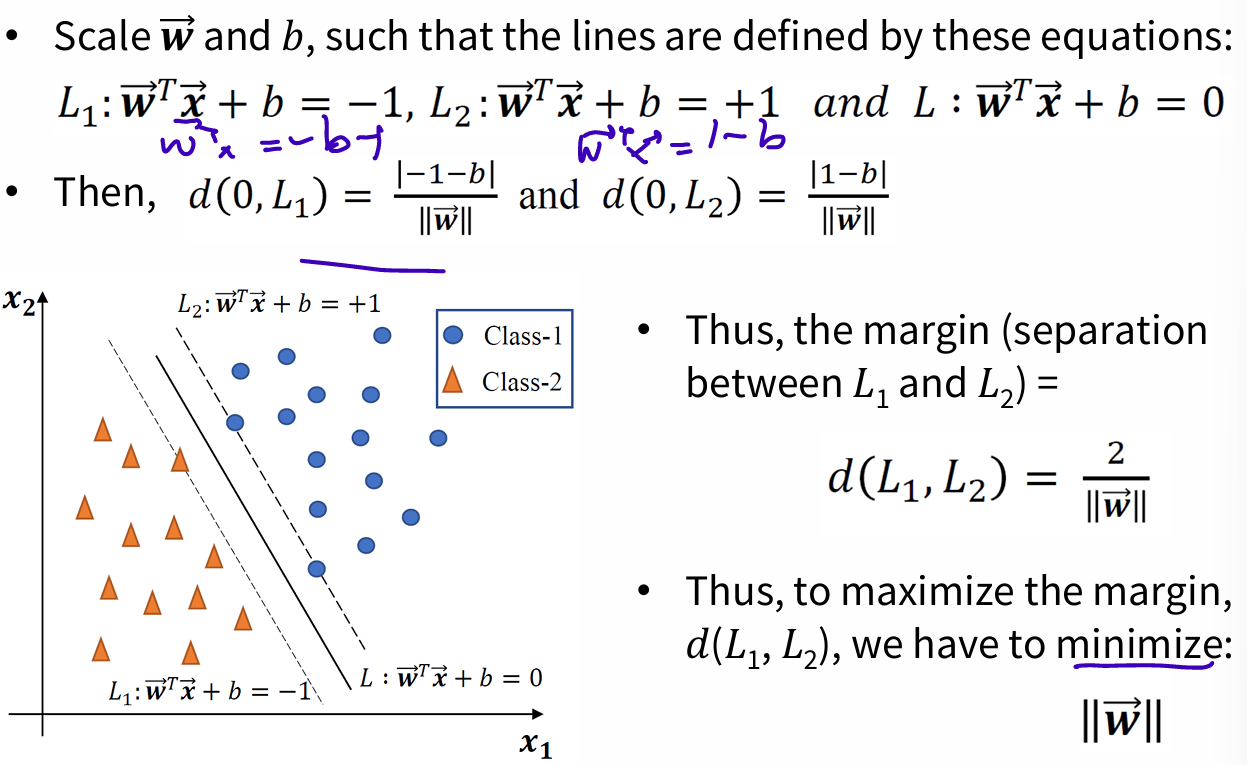
Large-margin Decision Boundary
Recall: the distance from the point (m, n) to the line Ax + By + C = 0:
The perpendicular distance(수직거리) of the line (L) from any point :
The perpendicular distance of the line from origin:
-
minimize
-
class label: (C1 class1, C2 class2)
-
constraint to our optimization problem:
class 2는 L1 아래쪽, class 1은 L2 위쪽 -
simply say:
(m: # of training samples)
Equation
- hyperplanes defined:
- Seperating Hyperplanes:
- Data Points:
Hard Margin SVM Classifier (Max Marigin Classifier)
Soft Margin SVM Classifier (Support Vector Classifier)
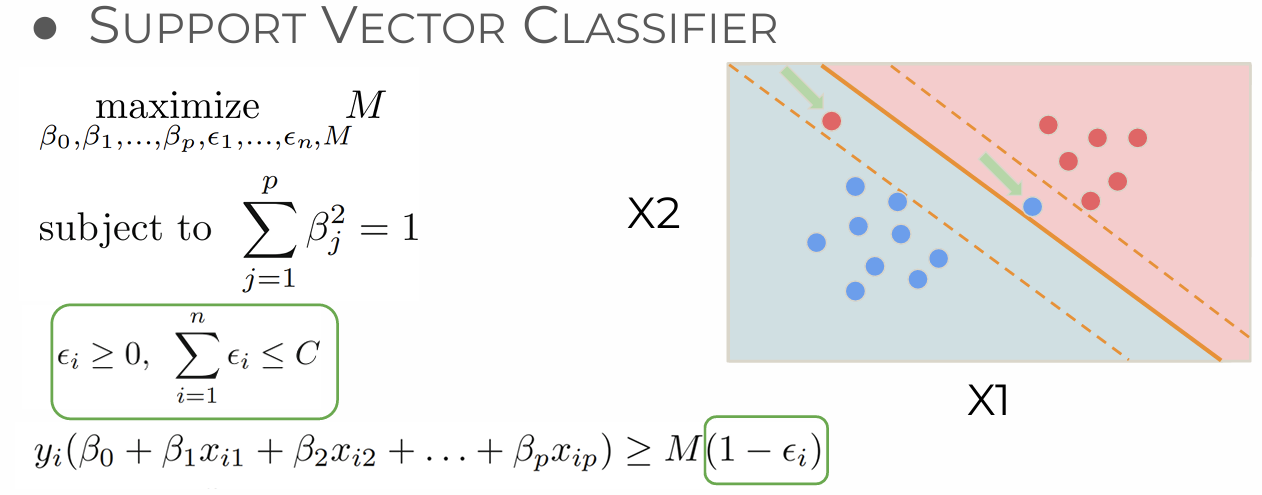
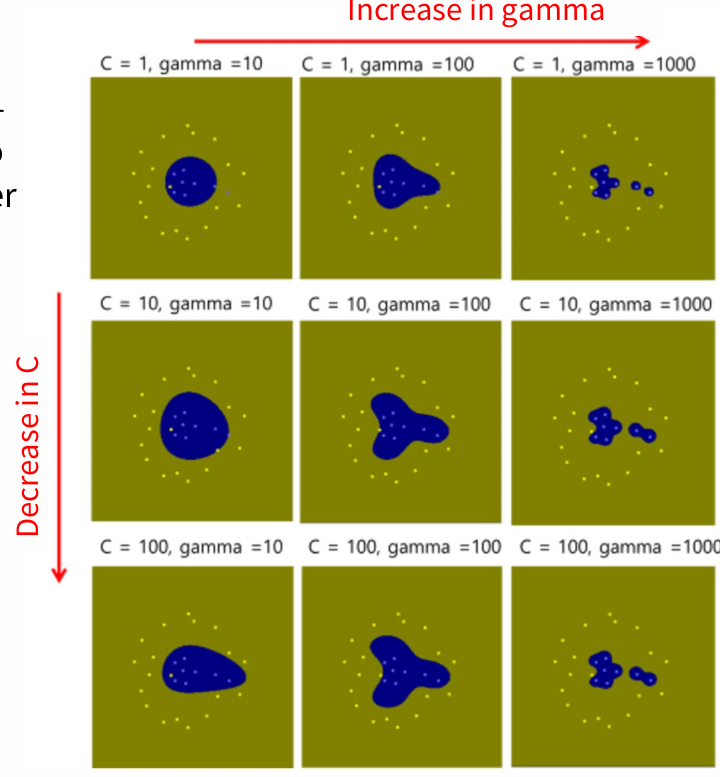
- C: Regularization parameter (user defined), Regularization inversely proportional to C, strictly positive, squared l2 penalty, default=1.0
Small C; allows large 's, more 's to slip through the margin (margin 안에 points 더 많아도 됨)
Large C; forces small 's
c작으면 epsilon 작아짐, 더 다양한 경우- miss 많아짐
Kernel Trick
very large feature space
avoid computations in the enlarged feature space, only need to perform computations for each distinct pair of training points
The use of kernels can be a measure of similarity between the original feature space and enlarged feature space.
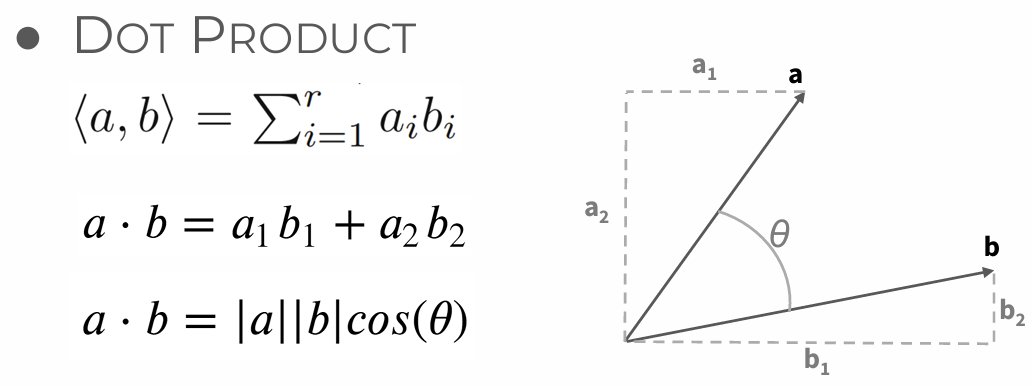
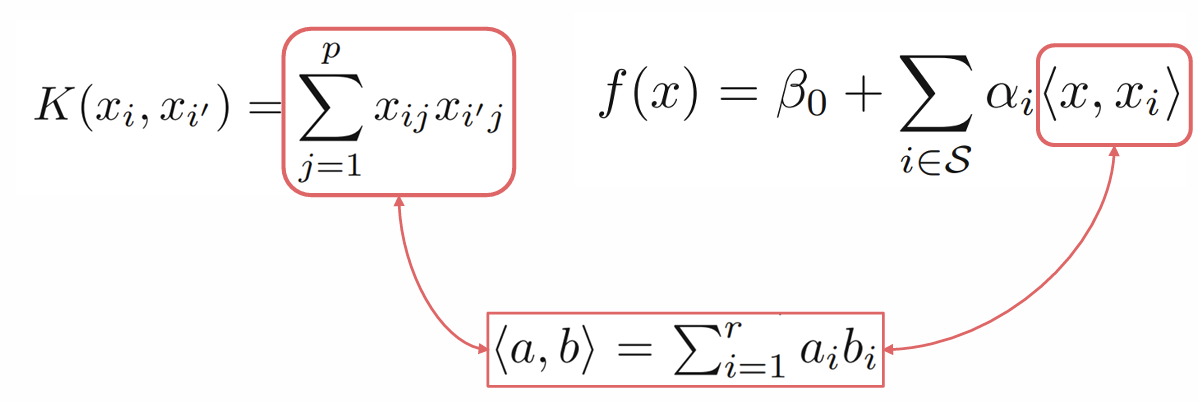
use inner(dot) product; similarty between the vectors
- Linear Support Vector Classifier rewritten
- (Linear) Kernel function
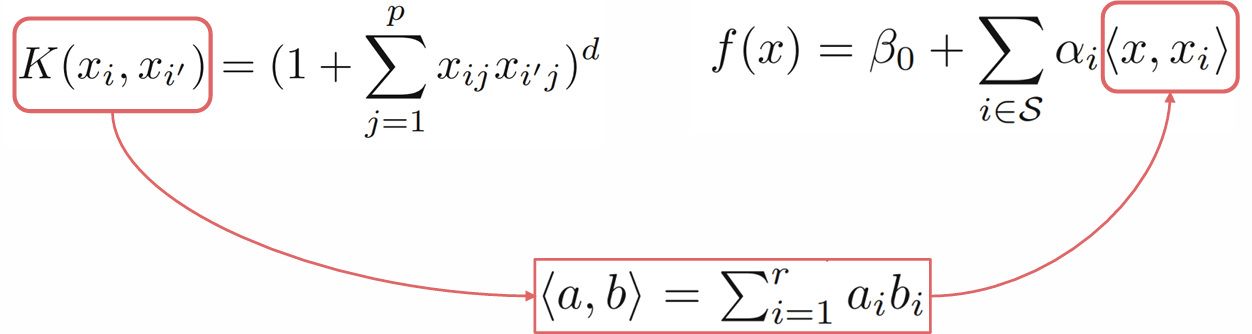
- Polynomial Kernel
- Radial Basis Kernel
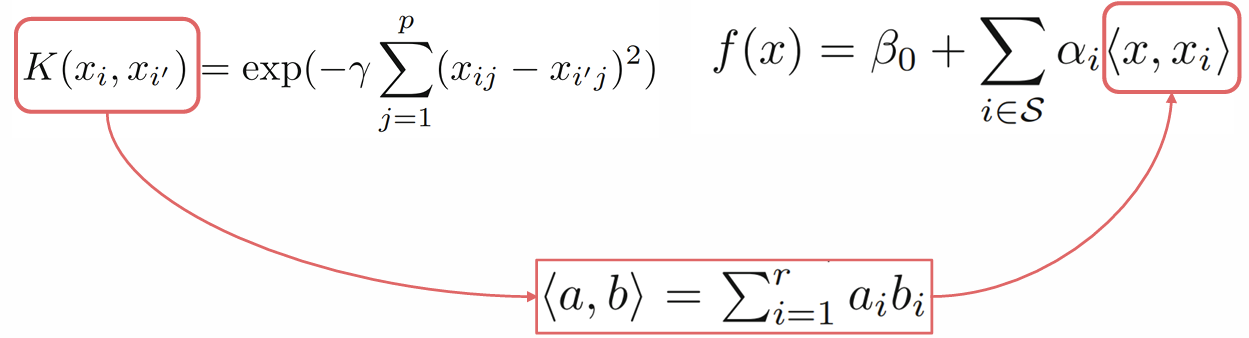
As gamma increases, the influence range of a data point shortens, while a lower gamma extends it.