
제2회 자율운항보트 경진대회(KABOAT2021)
- 대회기간 :
2021년 8월 16일(월)~20일(금)(대회 3일, 준비 2일; 총 5일)
-> 10월 말로 변경 - 장소 : 경남로봇랜드 컨벤션센터 및 가설수조
- 관련 링크 : 대한조선학회 제2회 자율운항보트 경진대회 개최공지
임무
원격조종 임무 중 정상 통행
원격으로 보트를 제어하여 주어진 임무 수행. 시작 게이트를 출발해 지정된 코드 통과 후 다시 시작 게이트로 복귀
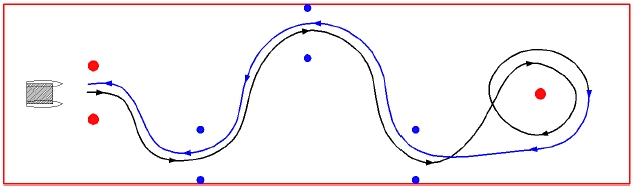
오토파일럿 임무 중 호핑투어
통과 위치 정보를 바탕으로 순서대로 추종

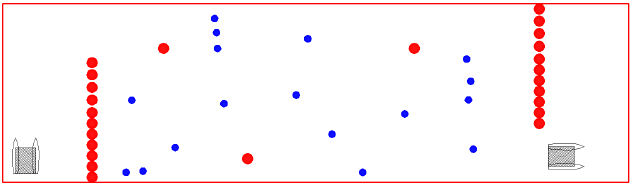
자율운항 임무 중 장애물 통과
시작 게이트 통과해 보트 스스로 상황 판단하는 자율운항 알고리즘 이용해 설정된 장애물을 회피하며 최종 게이트 도달
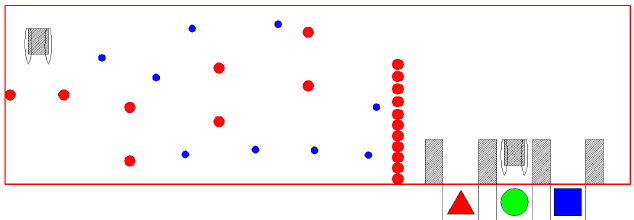
자율운항 임무 중 정상통행 도킹
시작 게이트를 통과해 장애물 회피하며 최종 임무 구역 도달 후, 표식이 다른 도크에 사전 지정된 표식 찾아 도킹
Team
인하대학교 조선해양공학과 i-Tricat Team 211

🏫Inha Univ. Naval Architecture and Ocean Engineering & Computer Engineering (Undergraduate) / 🚢Autonomous Vehicles, 💡Machine Learning