1. diffusion 큰그림 먼저보자.
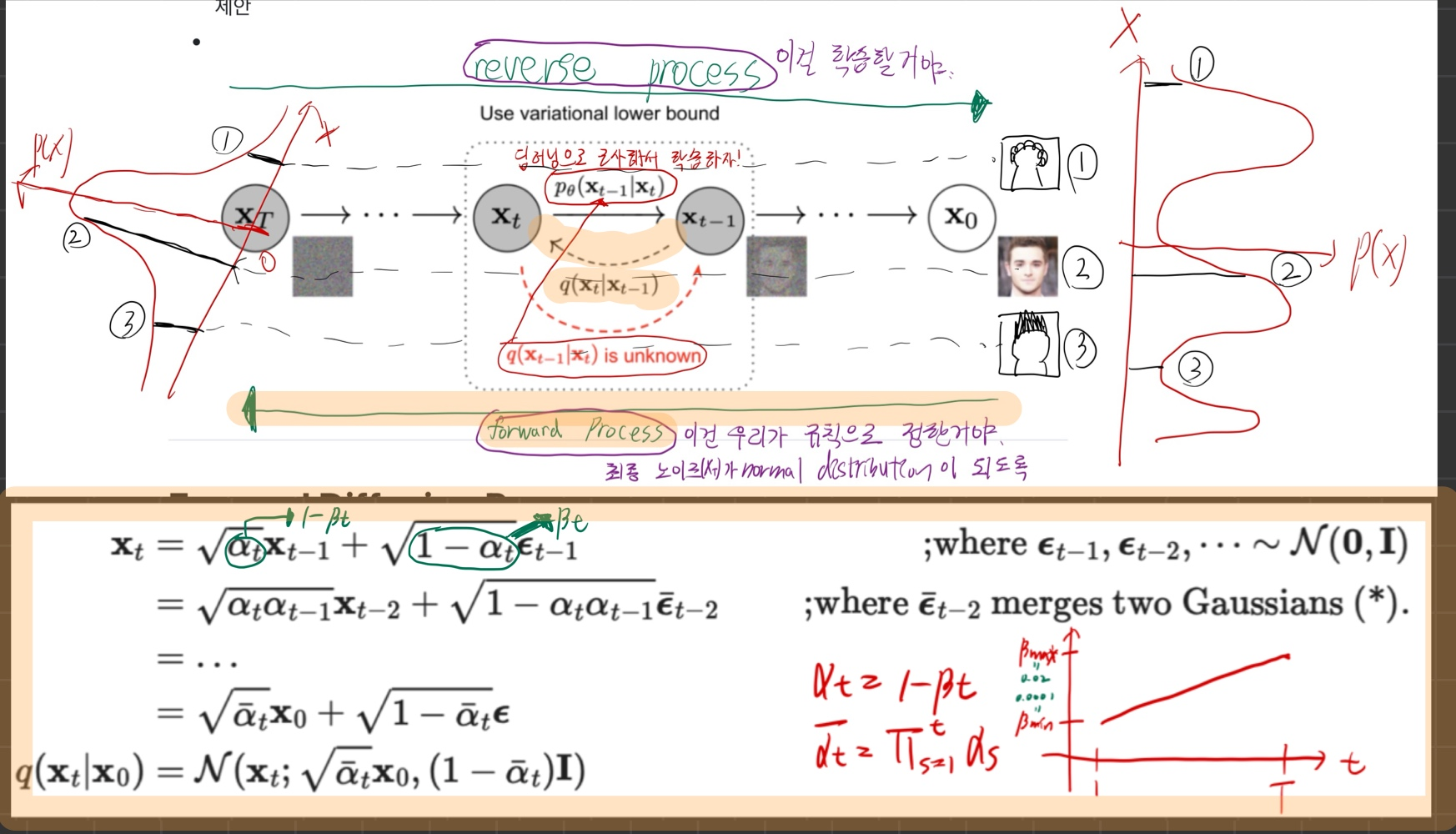
- 위 그림에서 forward process는 우리가 규칙으로 정한겁니다.
- T는 guassian noise 이미지()로 만들기 위해 노이즈를 주는 총 단계의 수 입니다. (hyperparameter)
- noise를 주는 방법은 위 그림의 노란색 박스에 명시되어 있습니다.
- 어떤 이미지를 noise 화 하건 (1번 이미지, 2번 이미지, 3번 이미지), 알파 베타 스케쥴은 똑같습니다.
- 위 그림에서 은 (1번 이미지, 2번 이미지, 3번 이미지) 마다 랜덤하게 매번 sampling 합니다.
- 위 노란색 박스 수식에 따르면, 우리는 에서 까지 noise를 주입할 때, -> -> ... -> 를 거치지 않고도, (동등한 noise화 과정인)
- -> 로 한번에 noise를 주입하는 수식을 제공합니다. (실제 학습시에는 이 수식을 이용합니다.)
- 우리의 목표 (reverse process를 학습하기!)
- 위 그림 왼쪽의 noise image을 샘플링해서 시작점으로 사용하여, 기 학습한
reverse process를 거치면,- 오른쪽 데이터 분포 그래프의 확률대로 이미지가 생성되는 생성 모델을 학습하고 싶음!
- 위 그림 왼쪽의 noise image을 샘플링해서 시작점으로 사용하여, 기 학습한
- 어떻게 학습하는데?
- 원본 이미지()에서, 점진적으로 noise image ()로 만드는 forward process는 위 수식처럼 우리가 직접 정의했어. ()
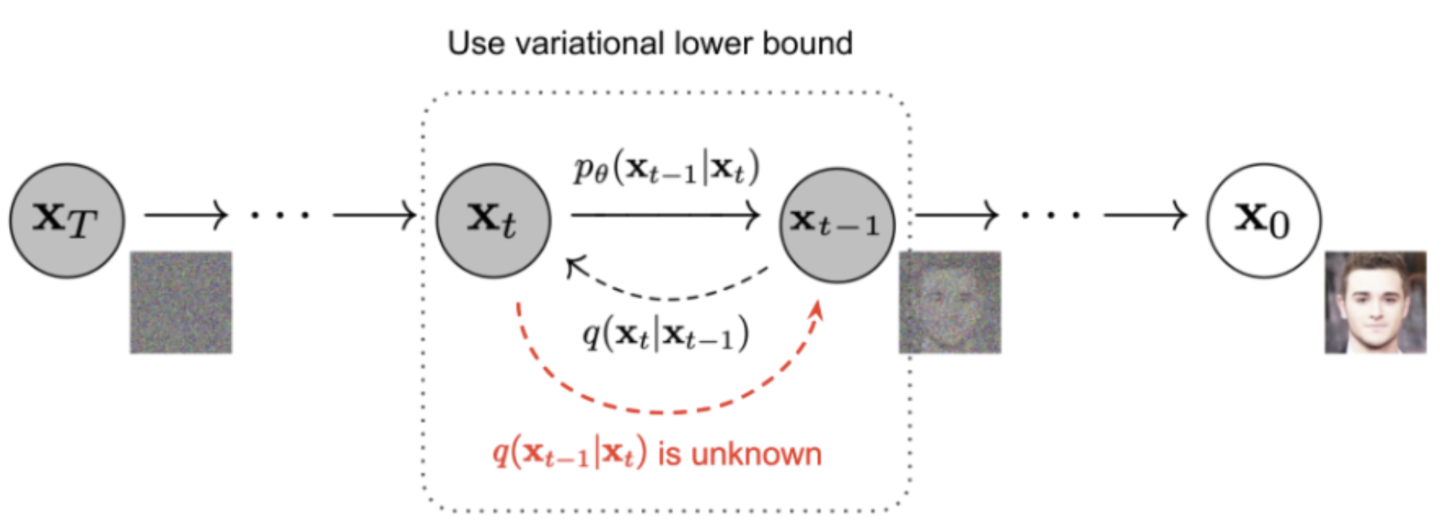
- 역 과정인, 를 우리가 알 수 있다면, reverse process를 알 수 있는 것이야. 하지만, 는 직접 알 수 없어. 그래서,,,
- 와 최대한 유사하게 되는걸 학습 목표 함수로 삼는
를 딥러닝 네트워크로 학습하자!
- 와 최대한 유사하게 되는걸 학습 목표 함수로 삼는
- [참고] 아래의 본격적 내용들을 이해하기 위해 중요한 정보
- 도 gaussian distribution이야. 단 아래의 조건 하에서,
- ₜ가 매우 작을때만 성립
- 다른 말로 하면, forward process가 매우 작은 양의 gaussian noise로 구성될 때 성립
- 증명은 pass !
- 그래서 우리는 도 gaussian distribution 으로 설정하고 학습할것임!

- 도 gaussian distribution이야. 단 아래의 조건 하에서,
2. 구체적으로 학습 어떻게 하는데?
2.1. 두괄식 결론부터
- 학습 과정과, inference 과정은 아래의 그림으로 정리 가능하다.
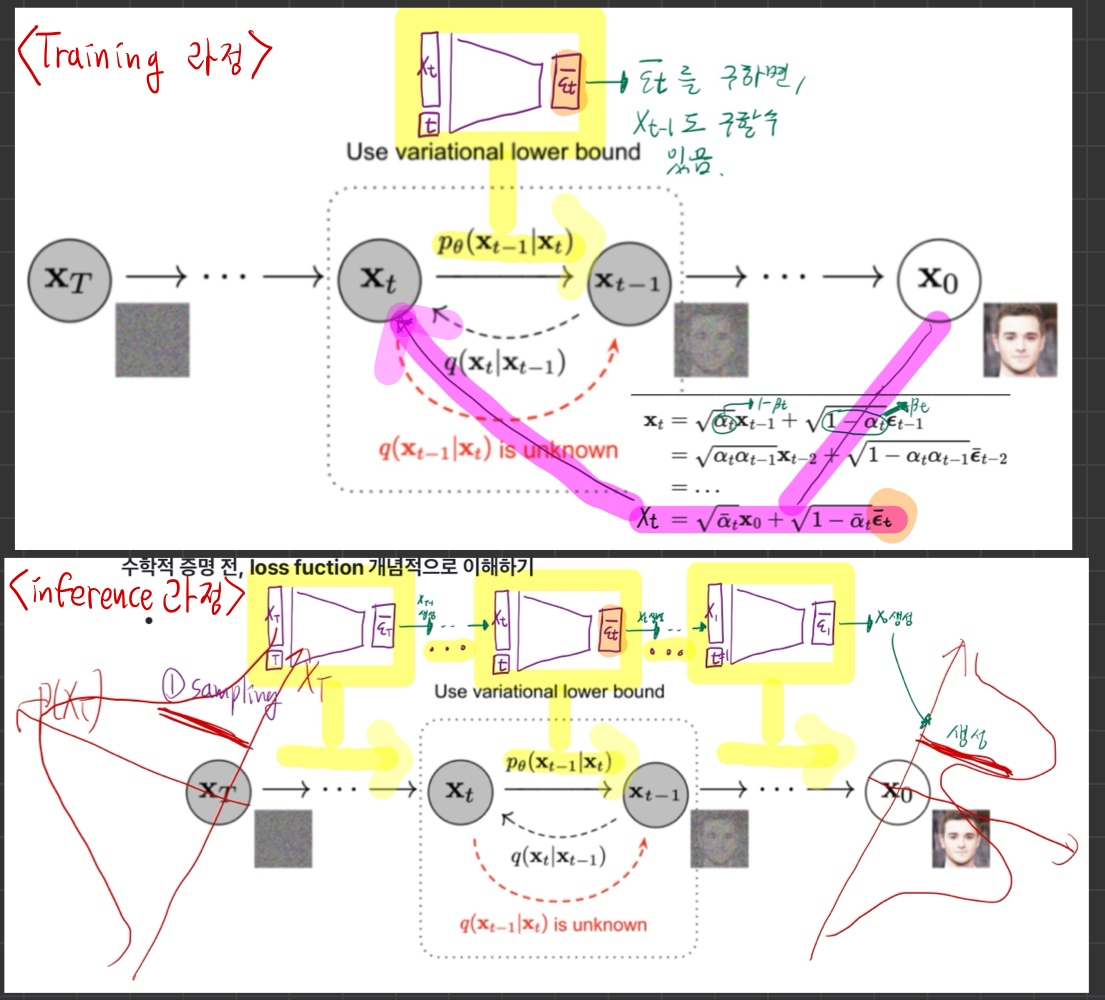
- 용어 정리: sampling = inference
- 왜 위 그림처럼 되는지를 이제 하나하나 살펴보자.
2.2. 왜 딥러닝 모델이 을 구하기 위해서, 출력해?
- 학습 목표 함수를 공부해보면 답이 나온다.
- 바로 위 글에서 와 최대한 유사하게 되는걸 학습 목표 함수로 삼는
를 딥러닝 네트워크로 학습하자!라는 목적에 따르면,- 학습 목표 함수는 아래와 같은 형태
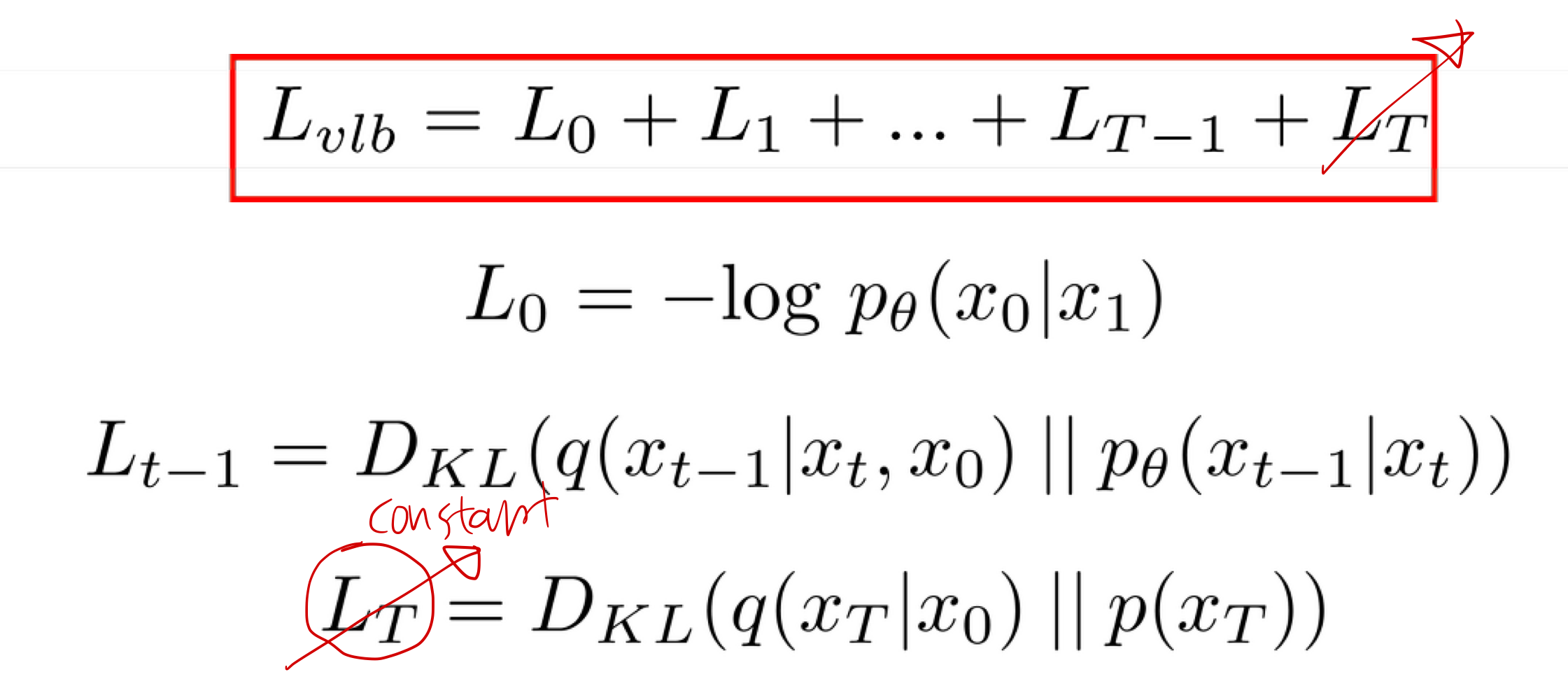
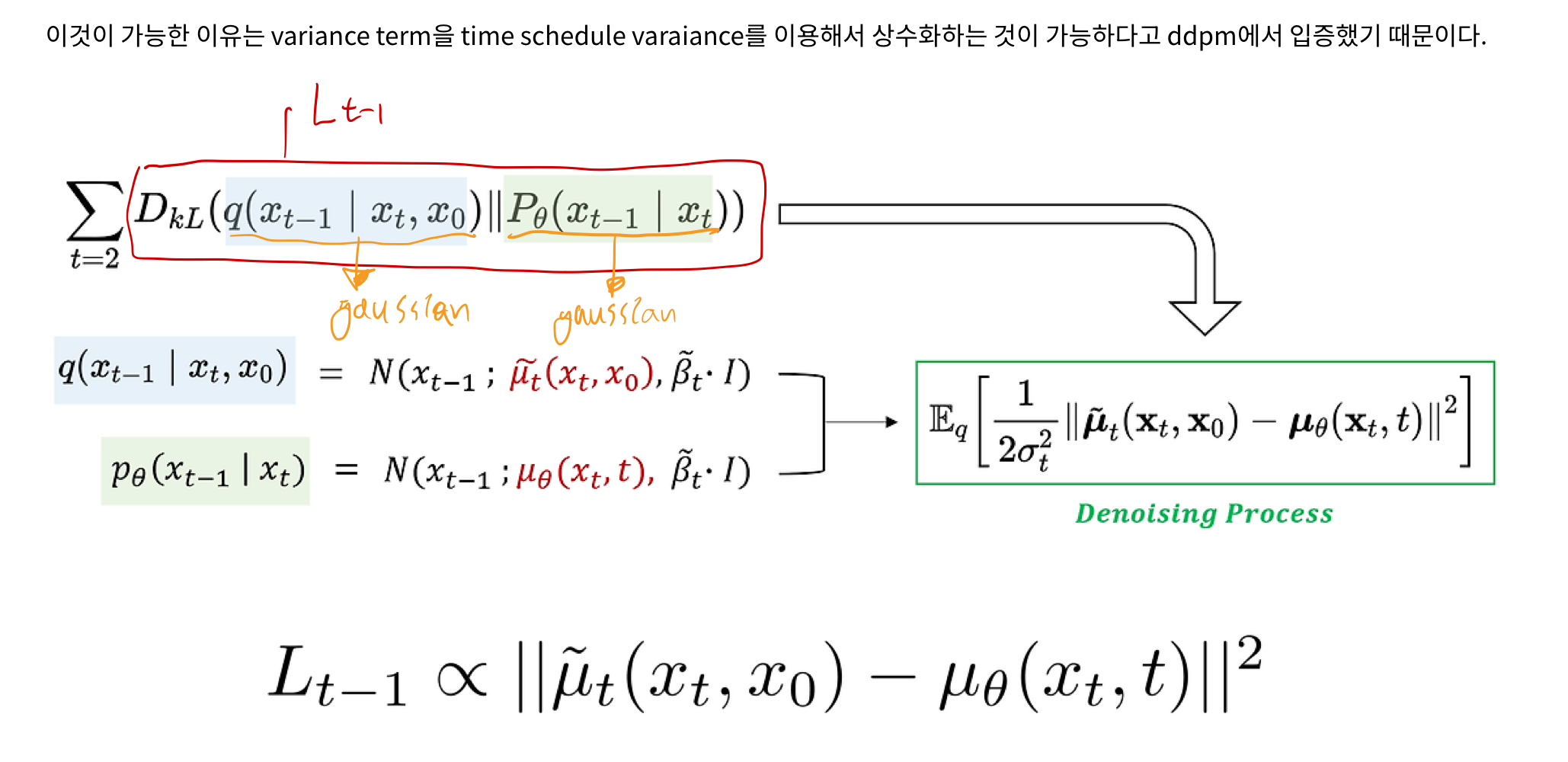
- 위 수식을 학습 목표로 삼고,
를 딥러닝 네트워크로 학습하자!- 왜 KL-divergence 항에 대신 가 쓰였는지는 차차 설명할 것입니다.
- 왜 수학적으로 위 수식을 목표 함수로 쓰는지, 그 이유와 증명도 차차 설명할 것입니다.
- 아까, 위에서 , 가 (ₜ가 매우 작을때) gaussian distribution 이라고 했습니다.
- 그러므로, 우리는 역시, gaussian distribution이라고 가정합니다. (이 가정은 수학적으로 증명되지 않은 가정)
- 이렇게 가정하는 이유는, 우리가 를 gaussian distribution이라고 가정하면, 이 분포의 평균과 분산을 수학적으로 계산할 수 있기 때문입니다.
- 유도/증명 과정은 Appendix A를 참고하세요.
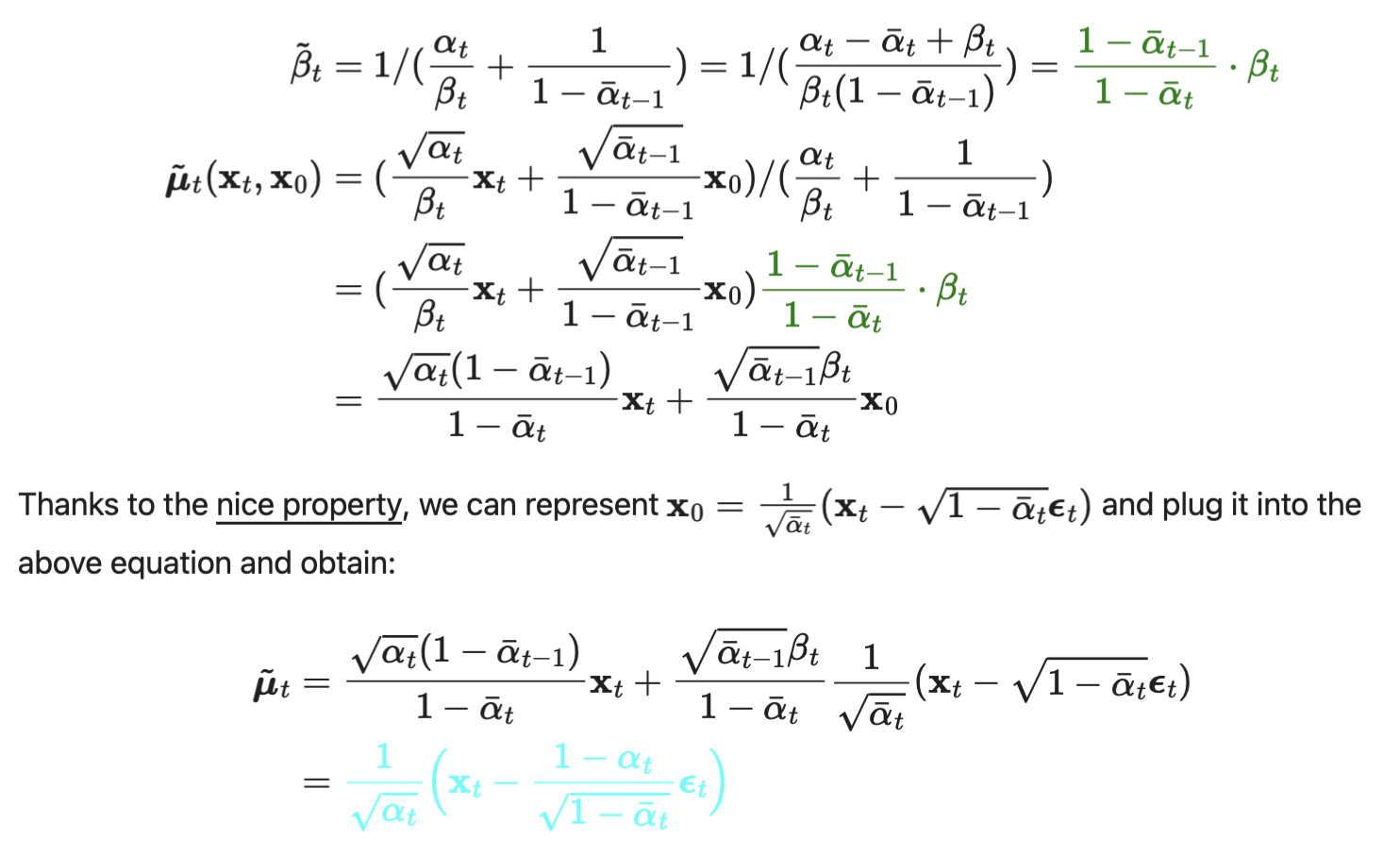
- 최종적으로, 계산으로 도출한 의 평균과 분산은 아래와 같다!
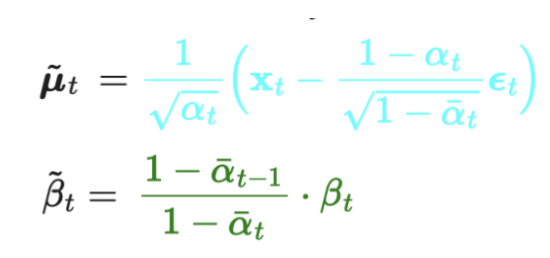
- 결론적으로, 우리는 gaussian의
- 분산은 알파(베타) 값만 필요하므로, 이미 알고 있는 값이고,
- 평균은
ϵ_t만 우리가 구할 수 있으면 된다!
- 왜냐, 알파(베타)는 forward process에서 sampling해서 쓴 것을 그대로 다시 이용하는 것이기 때문이다!
- 보충 설명
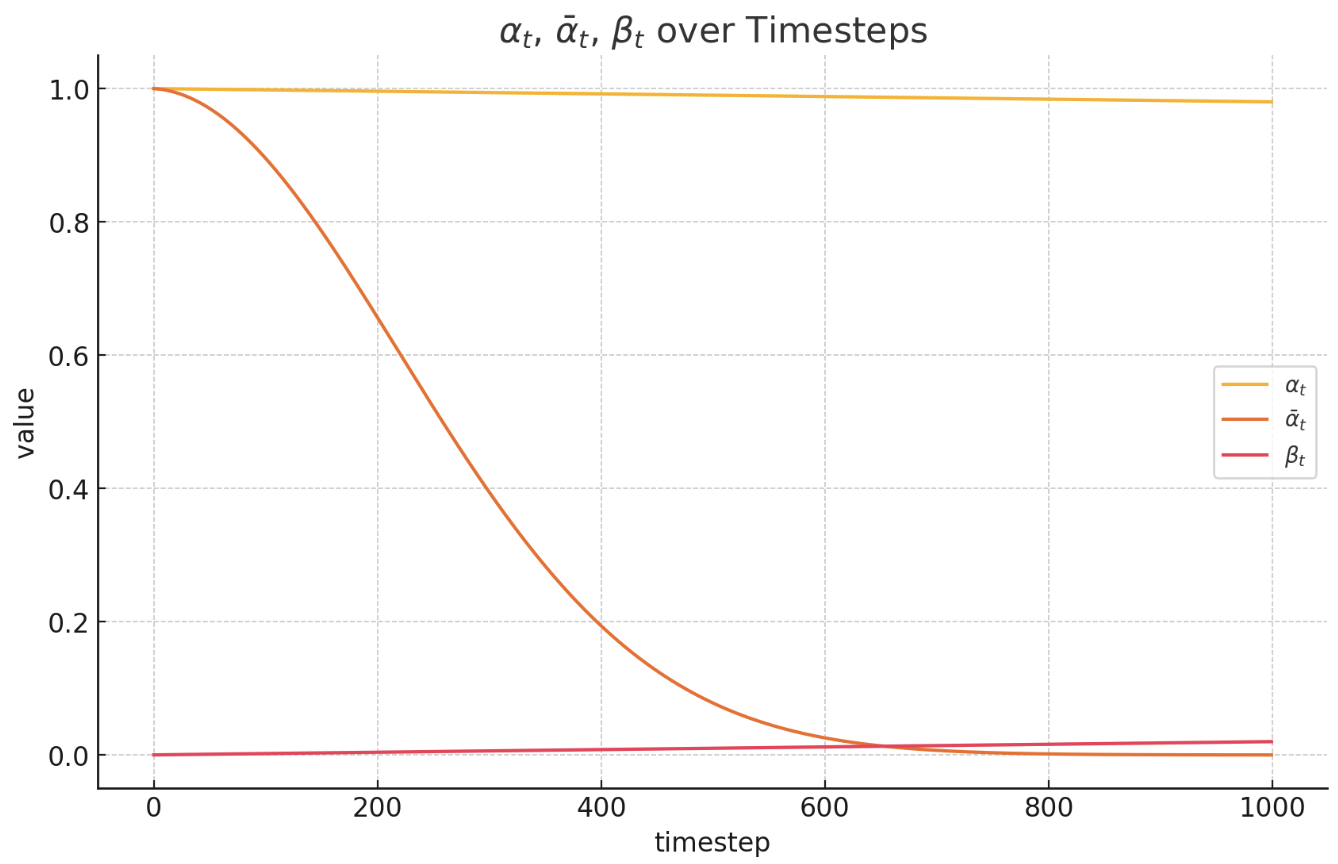
- 알파, 베타는 학습 시, 이미지 1, 2, 3 input에 상관없이, sampling step t 에 의해서만 결정되는 scheduling 을 따름
ϵ_t이미지 1, 2, 3 input이 들어올 때마다, 매번 random sampling 하는 값임
- 보충 설명
- 그러므로 우리는, 가
ϵ_t을 정확히 출력하도록 학습할 수 있다면,- 우리는 의 guassian distribution 의 평균/분산을 알게 되는 것이므로,
noise가 낀 이미지의 noise를 점진적으로 제거할 수 있게 된다!
- 우리는 의 guassian distribution 의 평균/분산을 알게 되는 것이므로,
- 그럼 우리는 이제,
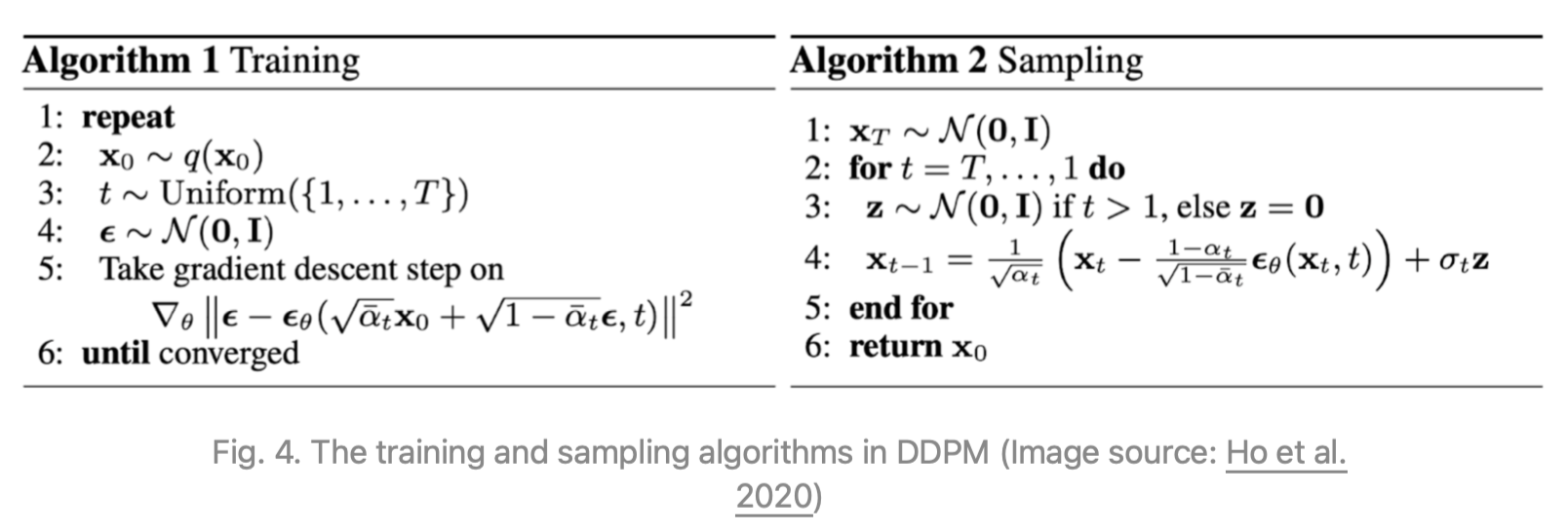
ϵ_t을 출력하는 딥러닝 네트워크인 의 학습 목표 함수를 정의해보자!- 분산은 우리가 구할 수 있으니까, 평균만 두 분포가 같도록 학습하면 되겠다. 구체적으로는 아래와 같다.

simplification? 왜 하는데?
- 학습 과정에서, t는 1과 T 사이에서 uniform하게 sampling된다.
- Simplified objective는 기존의 training objective에서 가중치를 제거한 형태
- 이 가중치항은 t에 대한 함수로, t가 작을수록 큰 값을 가지기 때문에
- t가 작을 때 더 큰 가중치가 부여되어 학습된다.
- 즉, 매우 작은 양의 noise가 있는 데이터에서 noise를 제거하는데 집중되어 학습된다.
- 이로 인해, 매우 작은 t에서는 학습이 잘 진행되지만, 큰 t에서는 학습이 잘 되지 않기 때문에
- 가중치항을 제거하여 큰 t 에서도 학습이 잘 진행되도록 한다.
목표 함수 최종 정리
- 최종적으로 정리하면, 위에서 구한 Loss Function은 아래와 표현 가능하다.
2.3. 학습 목표를 다른 관점에서 보자! 학습 데이터셋분포를 최대한 잘 모사한 생성 모델 만들기!
- 생성 모델의 목표는
학습 데이터셋의 분포를 최대한 유사하게 모사하는 것이다.- 이를 멋지게 수학적으로 표현하면 를 최대화 하는 것이다.
- 여기서 는 우리 학습 데이터셋에 있는 많은 원본 데이터들이다.
- 이를 멋지게 수학적으로 표현하면 를 최대화 하는 것이다.
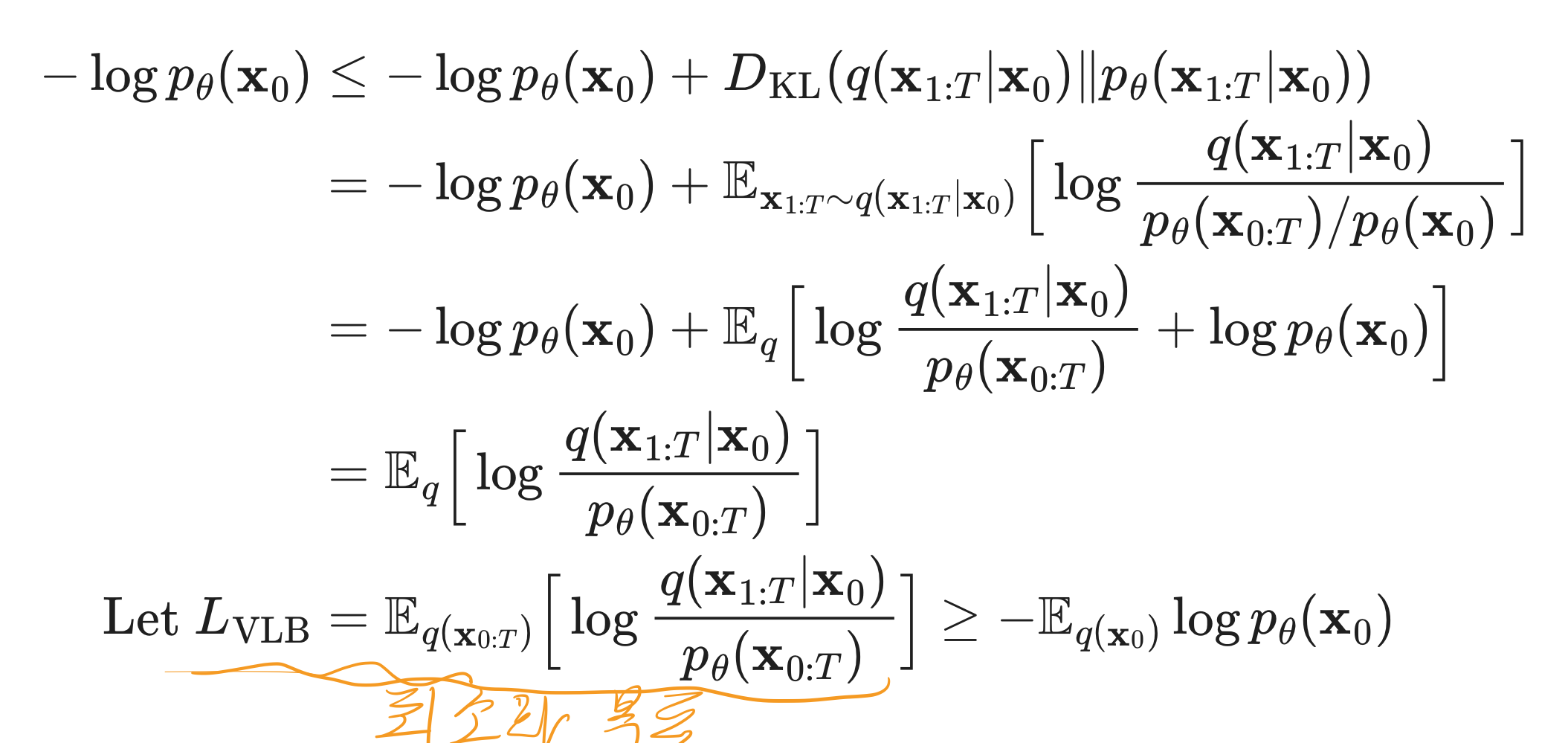
- 즉 우리의 학습 목표는 를 최대화하는 것이라고도 볼 수 있는데,
- 이를 직접 수식으로 계산하기 어려워서,
- 우리는 의 하한 값(Lower Bound)을 수학적으로 도출한 뒤, 이 하한 값을 극대화하는 목표함수로 삼는다.
- 이를 유식한 표현으로는
Variaional Lower Bound(VLB) (혹은 Evidence Lower B)und(ELBO) )이라고 한다.
- 이를 직접 수식으로 계산하기 어려워서,
수학적 증명하기
- 아래 과정 1, 과정 2 수학적 증명은 저도 잘 모릅니다.
- 아래
결론 목표 함수탭을 보면, 우리가 위에서 설명했던 diffusion process의 목표 함수와 일치한다는 것만 알고 가면 됩니다.- 다른 말로 하면, 우리 diffusion process의 목표 함수는 아래의 역할도 수행합니다.
- 학습 데이터셋분포를 최대한 잘 모사한 생성 모델 만들기
- 다른 말로 하면, 우리 diffusion process의 목표 함수는 아래의 역할도 수행합니다.
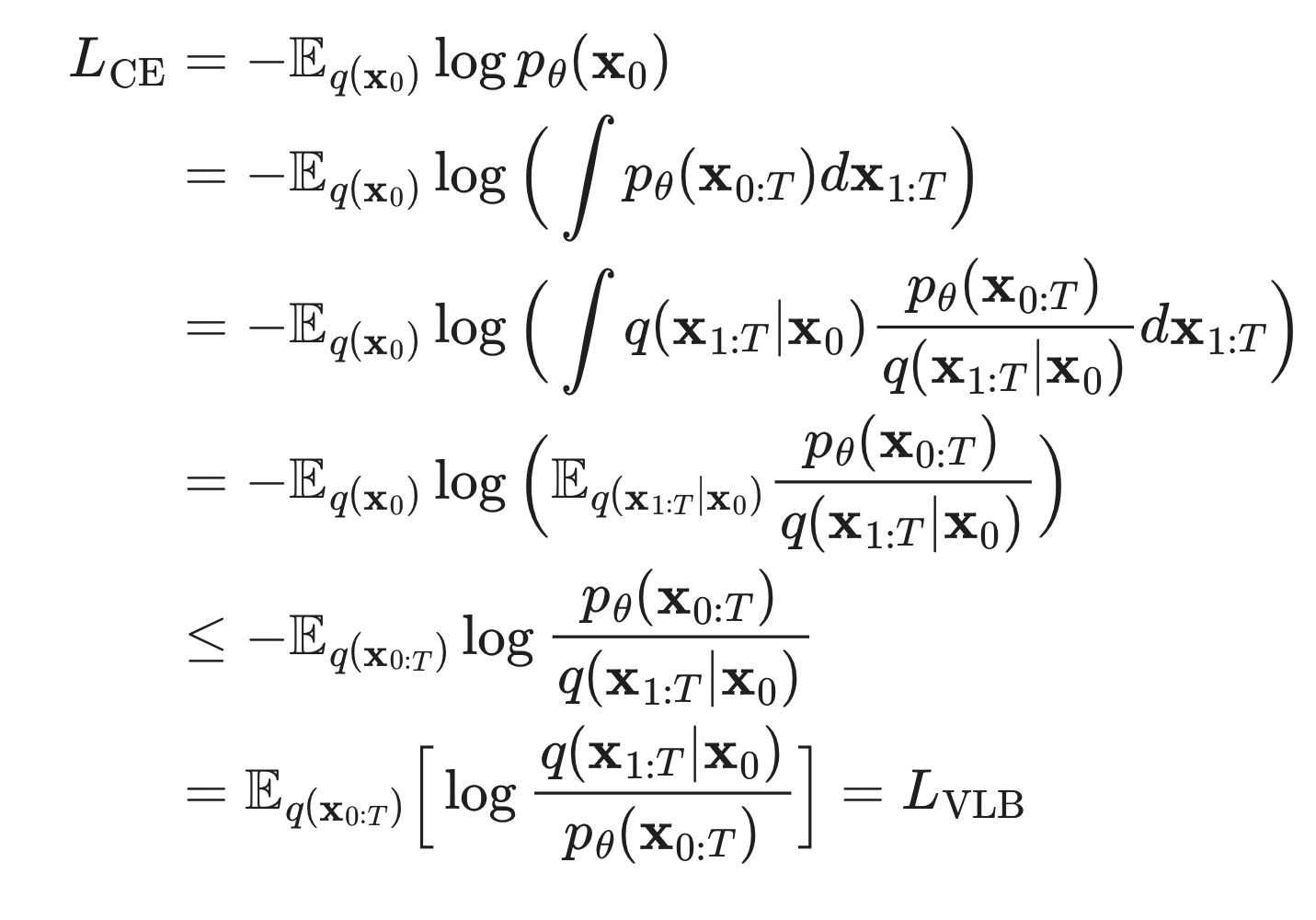
과정 1: Variational Lower Bound 유도하기
- 방법 1
- 방법 2
과정 2: Variational Lower Bound를 예쁘게 정리하기
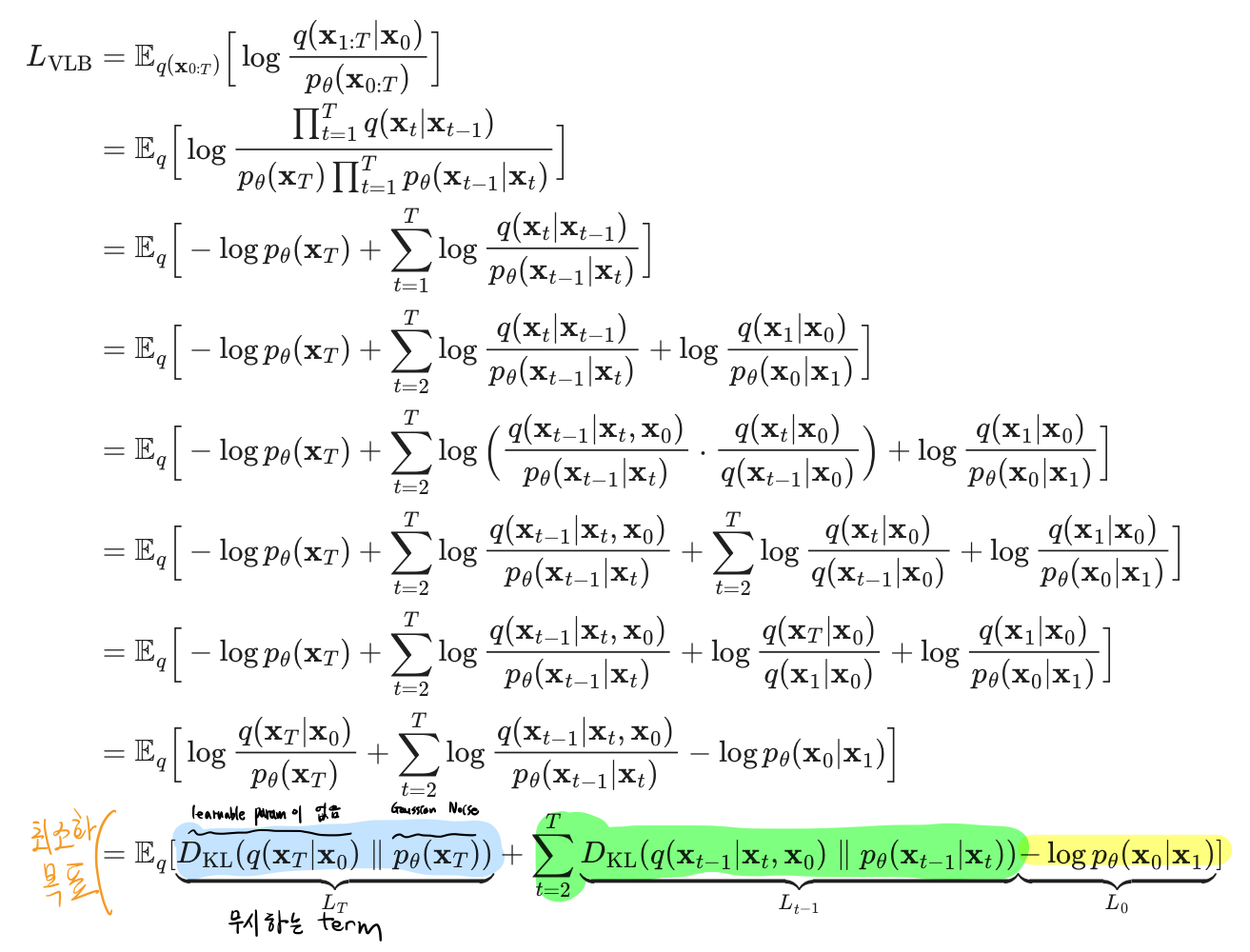
결론 목표 함수
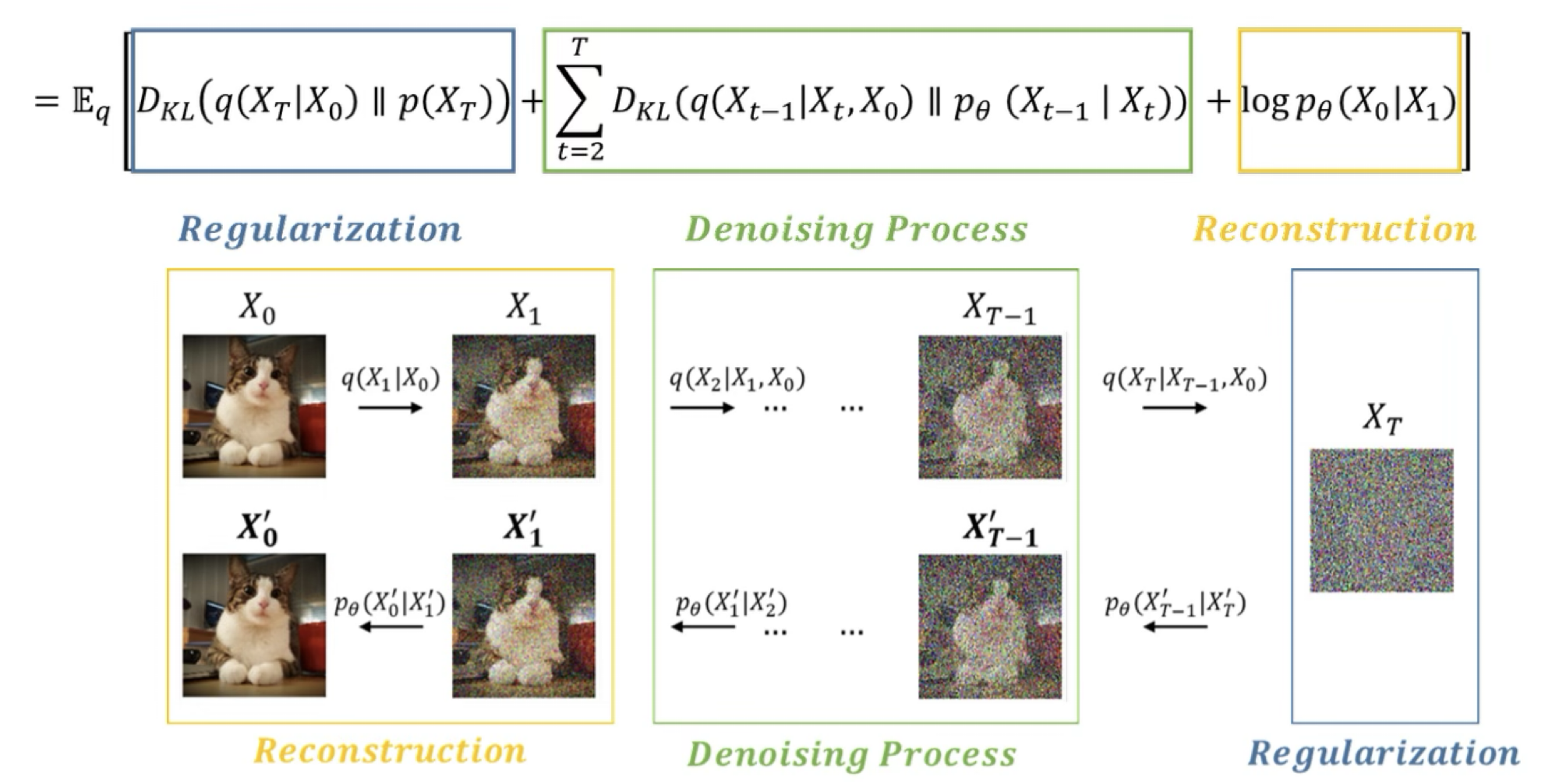
파란색: Regularization Term
- Regularization Term의 경우 삭제함. (아래의 이유 떄문)
- Diffusion과정 자체가 gaussian의 가정을 기반으로 하고,
- T가 무한대로 갈 때 istropic gaussian이 된다는 가정을 두고 있음
- 즉, 굳이 가우시안을 따르도록 regularization을 해줄 필요가 없기에 이는 삭제 된다.
노란색: Reconstruction Term
- 실제로 Diffusion이라는 물리적 현상 자체가 인접한 small time step 에 대해서 small gaussian noise를 주입해주는 과정으로 진행되기에 x0와 x1에서의 차이는 거의 없다.
- 실제로 DDPM에서는 이에 대해서 ablation study또한 진행했고, reconstruction term은 너무 작기에 학습에 유의미한 영향을 끼치지 않기에 제거했다.
최종 학습/inference 과정 정리
- DDPM에서는 βₜ를 학습 가능한 상태로 만드는 대신 상수로 고정하고, Σₜ(xₜ, t)을 다음과 같이 설정했습니다:
-
- 여기서 σₜ는 학습되지 않고 ,
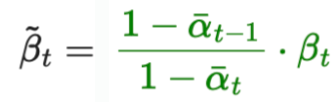
- 여기서 주목할 점: 위에서 유도한 분산인 아래 수식을 쓰지 않는다는 점
- 분산을 학습하지 않는 이유: 대각 분산 Σₜ를 학습하면 학습이 불안정해지고 샘플 품질이 저하된다고 판단
3. DDPM의 성능 평가
- DDPM은 높은 FID와 IS 점수를 기록했지만 높은 log-likelihood를 달성하는 데는 실패
- 높은 FID와 IS 점수:
생성된 이미지의 현실성(진짜 같이 보이나?)가 높고,생성된 이미지의 다양성이 높다!
- log-likelihood 실패:
모델이 데이터의 실제 분포를 정확하게 학습하지 못했음을 나타냄
- 따라서, DDPM이
다양하고 시각적으로는 뛰어난 이미지를 생성하지만,확률적 모델링 측면에서는 한계가 있음을 알 수 있습니다.
Appendix
A. 의 평균과 분산 유도하기
- 우리가 구하고 싶은 것: q(x_t-1|x_t)
- 우리는 x_0의 정보를 학습 시 알고 있고,
- x_0를 조건으로 할 때 -> reverse conditional probability의
가우시안 분포의 평균 분산이 수학적으로 계산 가능하다고 합니다. - 그래서 q(x_t-1|x_t, x_0)을 구하는 것으로 목표를 바꿔봅시다.

- 우리는 위 식에서, guassian 분포의 평균(파란색)과 분산(빨간색)을 구하는 것이 목표입니다.
- 자 이제, 수학적으로 평균(파란색)과 분산(빨간색)을 구해봅시다.
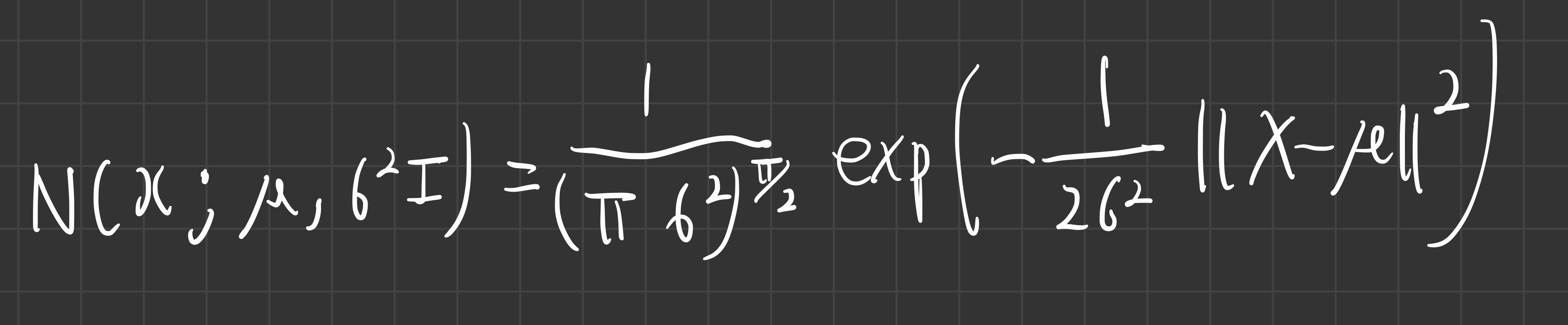
- 들어가기 전에: 다변수 정규분포의 확률 밀도 함수 수식
- 위 다변수 정규분포의 pdf 정의와, 자연로그의 성질을 이용하면, 아래와 같이 계산된다.
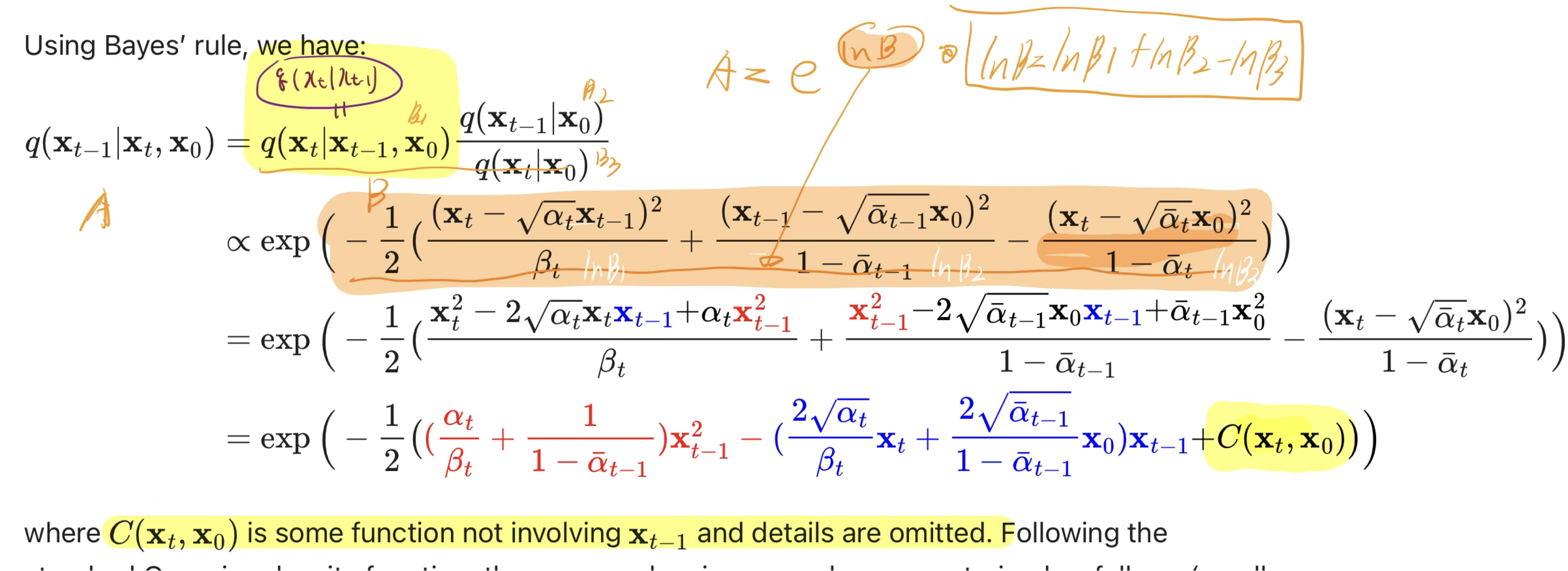
- 위 전개한 마지막 식으로부터 q(x_t-1 | x_t) gaussian의 평균(파란색)과 분산(빨간색)을 정리해보면, 아래와 같다.
- 분산 / 평균 순서

ad_official