diffusion planning
1.[Planning][24.11]DiffusionDrive: Truncated Diffusion Model for End-to-End Autonomous Driving
https://arxiv.org/pdf/2411.15139 https://github.com/hustvl/DiffusionDrive 400 stars 0. Abstract 최근, diffusion model을 자율주행 policy 학습에 적용 시도 diffu
2.[Planning][22.5][575] Planning with Diffusion for Flexible Behavior Synthesis
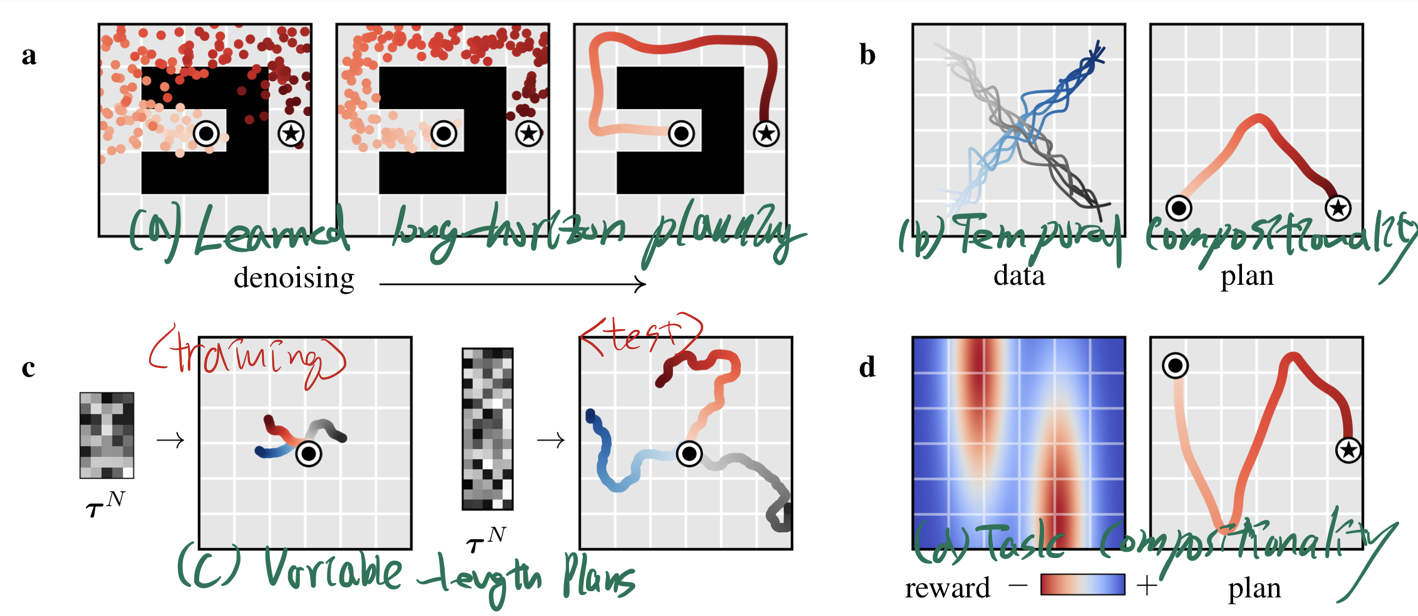
2022, 572회 인용https://arxiv.org/pdf/2205.09991https://github.com/jannerm/diffuser933 stars
3.[DiffusionDrive][nuscenes] test script 실행

1. 명령어 입력 명령어 tools/dist_test.sh 결론: tools/test.py를 분산 실행 모듈을 이용해서 실행. 인자로는 projects/configs/diffusiondriveconfigs/diffusiondrivesmall_stage2.py
4.[DiffusionDrive][nuscenes] V1SparseDrive
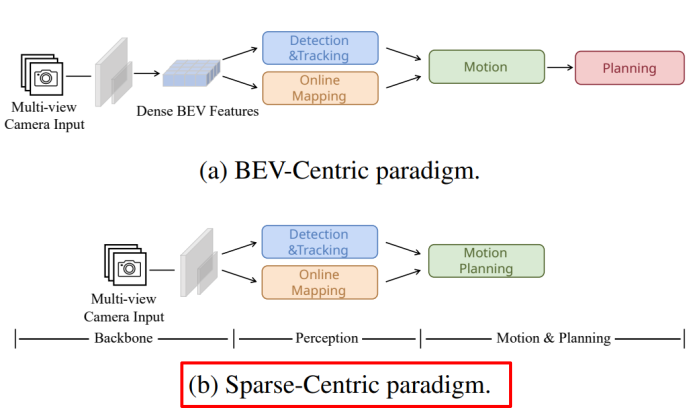
V1SparseDrive 클래스는 end-to-end 자율주행 시스템의 “감지기(detector)” 역할을 수행 즉, 다중 카메라 입력으로부터 특징(feature)을 추출하고, 이를 기반으로 객체 검출 및 (모션/플래닝) 예측을 수행하는 모듈이미지 백본 (img_bac
5.[DiffusionDrive][nuscenes] V1SparseDriveHead
V1SparseDriveHead는 다중 모드 예측, diffusion 기반 정제, 플러그인 기반 모듈 확장입력 이미지로부터 detection, map, 그리고 motion planning 결과를 통합하여 최종적으로 자율주행 시스템의 후처리 단계로 넘겨줍니다.통합 멀티태
6.[DiffusionDrive][nuscenes] [det_head]Sparse4DHead
개요 아래는 설정 파일의 det_head 구성(즉, Sparse4DHead)을 기준으로, 해당 모듈이 Detection Head로서 수행하는 역할과 그 하위 구성 요소들(InstanceBank, Anchor Encoder, Refine Layer, Sampler, De
7.[DiffusionDrive][nuscenes] [map_head] Sparse4DHead
다음은 제공된 코드(특히 Sparse4DHead와 관련된 map head 관련 모듈들), 설정 파일(diffusiondrive_small_stage2.py) 및 논문 내용을 기반으로, map head로서의 Sparse4DHead의 역할과 기능, 그리고 그 내부에서 사용
8.[DiffusionDrive][nuscenes] [motion_plan_head] V13MotionPlanningHead
V13MotionPlanningHead는 자율주행 시스템에서 객체 검출 및 지도 결과(det_output, map_output)를 기반으로 미래 모션과 자차 경로를 예측하는 엔드투엔드 모듈입력 및 Feature 통합: det_output: B, 900, 256 크기의
9.[DiffusionDrive][nuscenes] InstanceQueue
InstanceQueue는 모션 및 플래닝 모듈에서, 시간에 따른 객체(또는 자차)의 특징과 앵커 정보를 누적하여 저장하고 업데이트하는 역할이를 통해, 과거 프레임의 정보를 기반으로 현재 프레임의 추정(예: 자차 상태나 미래 궤적 예측)을 보완하거나, temporal
10.[DiffusionDrive][nuscenes] visualization
ipdb는 파이썬 인터랙티브 디버거(Interactive Python Debugger)라서, 해당 위치에서 코드 실행이 멈춘 뒤 명령을 기다리는 상태보통 디버깅을 위해 잠시 코드를 멈추는 용도로 쓰이는데, 당신이 원치 않는다면 이 상태를 빠져나와서 프로그램을 계속 실행
11.[DiffusionDrive][NavSim] 구동방법
1. Getting started from NAVSIM environment preparation 1.1. Download and installation Download the dataset 아래 3가지를 다운받아야 함 OpenScene logs 각 드라이
12.[diffusion planner] DIFFUSION-BASED PLANNING FOR AUTONOMOUS DRIVING WITH FLEXIBLE GUIDANCE
https://arxiv.org/pdf/2501.15564 Introduction rule based planning의 단점 새로운 환경에 대한 적응력이 떨어짐 각 상황마다 규칙을 바꾸는 것은 과도한 engineering 노력이 필요함 learning based planning 기대 효과: 학습 자원이 많아질수록 -> 성능이 선형적으로 증가할 ...
13.[diffusion-planner][Readme]DIFFUSION-BASED PLANNING FOR AUTONOMOUS DRIVING WITH FLEXIBLE GUIDANCE
nuPlan dataset 다운로드체크 포인트 다운로드Set up configuration in sim_diffusion_planner_runner.sh.run bash sim_diffusion_planner_runner.shSet up configuration in
14.[diffusion-planner] nuplan/planning/script/utils.py
시뮬레이션 실행에 필요한 여러 공통 리소스(작업자, 콜백, 출력 폴더, 프로파일러 등)를 한 번에 초기화하고 반환하여, 이후 시뮬레이션 과정에서 이들을 재사용할 수 있도록 준비하는 역할아래 작업을 하는 4가지 콜백을 관리하는 객체 생성시뮬레이션 시간 측정metric 기
15.[diffusion-planner]nuplan/planning/script/builders/simulation_callback_builder.py
build_callbacks_worker 함수는 시뮬레이션 실행 중에 콜백(callback) 함수들을 병렬로 처리하기 위한 "작업자 풀(WorkerPool)"을 생성하는 역할즉, 이 함수는 설정에 따라 콜백 함수들을 병렬 처리할 수 있는 작업자 풀을 구성하여, 시뮬레이
16.[diffusion-planner] nuplan/planning/script/builders/simulation_builder.py
build_simulations 함수는 시뮬레이션 객체들을 생성하고 구성이 함수는 주어진 설정(cfg), 작업자 풀(worker), 콜백(callback) 목록, 그리고 (선택적으로) 미리 만들어진 플래너들을 활용하여, 각 시나리오에 대해 시뮬레이션을 구축로깅과 컨테이
17.[diffusion-planner] nuplan/common/utils/distributed_scenario_filter.py
분산 환경에서 시나리오(실행할 시뮬레이션의 대상 데이터)를 효율적으로 분배하고 필터링하는 역할을 수행특히, get_scenarios 메서드는 현재 노드(또는 머신)가 처리해야 할 시나리오 목록을 결정하는 핵심 함수이 클래스와 get_scenarios 메서드의 기능을 자
18.MPC VS Multi-modal trajectory IL VS Diffusion
장점안전성 및 설명가능성명시적으로 cost function과 Constraint를 걸 수 있다.단점성능 극대화의 이론적 한계주변 agent trajectory prediction 모듈과, MPC의 cost function이 다르기 떄문에, 각 모듈의 성능을 극대화하는
19.DiffusionDrive VS Diffusion Planner
ego와 주변 agents의 multiple 미래 궤적 생성을 위해, 초기 anchors를 기반으로 생성함.인간 운전자는 random distribution이 아닌, 확립된 주행 패턴을 따르므로 합리적 (좌회전 / 직진 / 우회전 / 차선 변경 등)inference 속