🎓 CartPole 실험 개요
본 실험은 OpenAI Gym의 CartPole-v1 환경에서 Q-learning을 적용하여 강화 학습을 진행한 실험이다.
일반적으로 CartPole 문제는 DQN(Deep Q-Network)을 이용하여 해결하는 경우가 많지만, 이번 실험에서는 저번에 공부한 Q-learning을 활용하여 학습 과정과 성능을 직접 확인하는 것을 목표로 하였다.
특히, 행동 선택 방식(Exploration Strategy)에 따른 학습 성능 차이가 궁금하여 각 방식에 대한 실험도 진행하였다.
첫 번째 방식은 Epsilon-Greedy(ε-그리디) 탐색법이며, 두 번째 방식은 Softmax Policy 기반 행동 선택이다.
추가적으로 Epsilon-Greedy 방식에서는 가우시안 노이즈(Gaussian Noise)를 적용하여 행동 선택의 다양성을 증가시켰다.
본 실험을 통해 각 행동 선택 방식이 학습 성능에 미치는 영향을 비교 분석하고, 어떤 방식이 CartPole 환경에서 더 효과적인 학습을 유도하는지 확인하는 것이 목적이다. 참고로 이 글에서는 실험에 진행한 코드가 등장하지 않고 결과적인 부분과 어떤식으로 코드를 구성하였는지만 나오는 글이다.
🎓 OpenAI Gym이란?
OpenAI Gym은 OpenAI에서 개발한 강화 학습 환경 라이브러리로, 다양한 RL 알고리즘을 연구하고 실험할 수 있도록 설계되었다. 이후 OpenAI가 Gym을 직접 관리하지 않기로 결정하면서, Gymnasium이 후속 프로젝트로 개발되었다. Gymnasium은 Farama Foundation에서 유지보수를 담당하며, OpenAI Gym과 완벽한 하위 호환성을 유지하면서도 더욱 안정적이고 확장 가능한 기능을 추가하였다.
🎓 CartPole 소개
CartPole은 고전 제어(Classic Control) 문제 중 하나로, 강화 학습(Reinforcement Learning, RL)에서 널리 사용되는 환경이다. 이 환경은 역진자(Inverted Pendulum) 문제를 기반으로 하며, 막대(Pole)가 수직으로 서 있도록 균형을 유지하는 것이 목표이다.
🛠 실습 환경
- 사용한 환경 : Anaconda, PyCharm
- 강화 학습 환경 : OpenAI Gym
- 파이썬 버전 : 3.8
📝 CartPole 환경 정보 및 설명
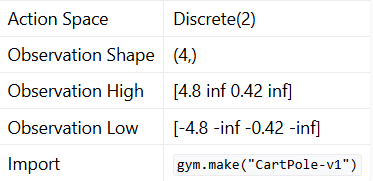
위 데이터는 OpenAi Gym에서 제공하는 가상의 물리적인 값으로 생각하면 된다. 앞으로 다양한 실습을 하기 위해서 위에서 설명하는 각 요소가 어떤 역할인지 잘 알아두면 좋다.
-
Action Space Discrete(2) (좌/우 이동)
Discrete(2): 이산 공간(Discrete) 형태이며, 두 개의 선택지만 존재함.- 가능한 행동:
0: 수레(Cart)를 왼쪽으로 이동1: 수레(Cart)를 오른쪽으로 이동
- 가능한 행동:
- 예시:
- 에이전트가
0을 선택하면 수레가 왼쪽으로 이동함. - 에이전트가
1을 선택하면 수레가 오른쪽으로 이동함.
- 에이전트가
-
Observation Shape (4,) (4개의 상태 변수)
(4,): 관측 공간(Observation Space)의 형태를 나타냄.- 총 4개의 상태(State) 변수를 포함
- 각각 수레와 막대의 위치 및 속도를 나타냄
- 예시:
- 환경에서 반환하는 카트의 물리적인 관측 값:
[0.2, -0.5, 0.1, 0.02]
- 환경에서 반환하는 카트의 물리적인 관측 값:
-
Observation High [4.8, ∞, 0.42, ∞] (상태 변수의 최댓값)
- 관측 공간에서 각 상태 변수의 최대 허용값을 나타냄
4.8: 수레 위치(Cart Position)의 최댓값 (경계를 넘으면 종료)∞: 수레 속도(Cart Velocity)의 최댓값 (이론적으로 제한 없음)0.42: 막대 각도(Pole Angle)의 최댓값 (약 24도 이상 기울어지면 종료)∞: 막대 각속도(Pole Angular Velocity)의 최댓값 (이론적으로 제한 없음)
- 관측 공간에서 각 상태 변수의 최대 허용값을 나타냄
-
Observation Low [-4.8, -∞, -0.42, -∞] (상태 변수의 최솟값)
- 관측 공간에서 각 상태 변수의 최소 허용값을 나타냄
-4.8: 수레 위치(Cart Position)의 최솟값 (경계를 넘으면 종료)-∞: 수레 속도(Cart Velocity)의 최솟값 (이론적으로 제한 없음)-0.42: 막대 각도(Pole Angle)의 최솟값 (약 -24도 이하 기울어지면 종료)-∞: 막대 각속도(Pole Angular Velocity)의 최솟값 (이론적으로 제한 없음)
- 관측 공간에서 각 상태 변수의 최소 허용값을 나타냄
-
Import
gym.make("CartPole-v1")(환경 생성)- CartPole 환경을 생성하는 코드
- OpenAI Gym/Gymnasium에서 CartPole 환경을 실행할 때 사용
CartPole 환경 설명
-
물리적 구조 및 목표
- 수레 위에 회전 가능한 막대가 부착된 형태
- 목표: 막대가 넘어지지 않도록 최대한 오래 유지
-
상태(State)와 행동(Action) 정의
- 상태:
Cart 위치,Cart 속도,막대 각도,막대 각속도(총 4가지) - 행동:
0: 왼쪽으로 힘을 가함1: 오른쪽으로 힘을 가함
- 상태:
-
보상(Reward) 및 에피소드 종료 조건
-
env.step(action)을 수행하면 환경에서 기본적으로 제공하는 보상(reward)을 받음. -
보상 시스템
- 각 타임스텝마다
+1보상이 부여됨. - 즉, 막대를 오래 유지할수록 총 누적 보상이 커짐.
- 각 타임스텝마다
-
에피소드 종료 조건 (Penalty 적용 상황)
- 막대가 ±12도 이상 기울어지면 즉시 종료
- 수레가 ±4.8 위치를 초과하면 즉시 종료
-
추가 패널티 적용
200스텝을 채우지 못하고 종료되면 추가적인 패널티를 적용.- 패널티 크기:
reward = min(-(200 - cnt), -50)(최소-50으로 제한). - 즉, 빨리 종료될수록 더 큰 패널티를 받음.
- 패널티 크기는 임의로 결정한 것이니 본인의 생각대로 수정하는 것이 좋다.
-
랜덤 에이전트 실험
Gym을 이용한 환경 불러오기 환경 초기화 및 기본 동작 확인
- 랜덤 에이전트(Random Agent)는 강화 학습 없이 무작위 행동(Random Action)을 수행하는 에이전트임.
- 즉, 환경의 상태를 고려하지 않고 무작위로 행동을 선택하며, 이를 통해 환경의 기본 동작을 확인할 수 있음.
- 실험 목적
- 강화 학습을 적용하기 전에 기본적인 환경 동작과 보상 체계를 확인하는 단계.
- 랜덤 에이전트의 성능을 측정하여, 학습된 에이전트와 비교하는 기준을 설정.
- 실험 결과
- 랜덤 에이전트는 막대의 균형을 유지하지 못하고 빠르게 종료됨.
강화 학습 알고리즘 적용
-
강화 학습을 적용하여 에이전트가 학습하도록 함.
-
이 코드에서는 Q-learning 알고리즘을 사용하여 CartPole 환경에서 학습을 진행함. 보통 CartPole 문제는 DQN 알고리즘을 사용하여 구현하는 문제이다. 하지만 이번에는 Q-Learning의 공부를 확인하고 싶어 Q-Learning를 사용하여 CartPole의 문제를 해결하였다.
-
Q-table을 CartPole 환경을 기반으로 생성
-
Q-table은 CartPole의 상태 공간(Observation Space)과 행동 공간(Action Space)을 바탕으로 구성되었다.
-
CartPole의 환경 정보는 다음과 같다

-
위 정보를 바탕으로 Q-table을 구성
-
Action Space →
Discrete(2): 두 가지 행동 (0: 왼쪽,1: 오른쪽) -
Observation Space → 4개의 상태 변수를 각각 20개 구간(bin)으로 이산화(Discretization)
-
따라서, Q-table의 크기는 (20, 20, 20, 20, 2) = 320,000개 상태-행동 쌍
bin값이 많을수록 Q-table이 더욱 상세해져 학습이 잘 진행되는 것을 확인했다.- 하지만
bin개수가 커질수록 메모리 사용량이 매우 증가하고 학습 시간이 길어지는 문제가 발생하였다. - 내 컴퓨터 성능을 고려했을 때,
bin = 20이 한계였다.
-
-
주요 학습 과정
- 환경 초기화 (
env.reset()) - 현재 상태를 이산(discretized) 상태로 변환
- 탐색률(Exploration Rate)에 따라 행동 선택
- 확률적으로 무작위 행동(탐색) 또는 최적 행동(활용) 수행
- 행동 실행 후 보상과 새로운 상태 확인
- Q-테이블 업데이트
Q(s, a) = (1 - α) * Q(s, a) + α * (reward + γ * max Q(s', a'))
- 종료 조건이 충족될 때까지 반복
- 환경 초기화 (
-
학습 목표
- 최적의 정책을 학습하여 막대를 최대한 오래 유지하는 것.
- 랜덤 에이전트보다 더 높은 보상을 얻을 수 있도록 행동을 최적화함.
- 600 스텝 이상 유지할 수 있도록 목표를 결정하였다.
행동 선택 방식 실험 (Softmax & Epsilon-Greedy)
- 강화 학습에서 행동을 선택하는 방법을 비교 실험함.
- 두 가지 방식으로 행동을 선택하여 탐색(Exploration)과 활용(Exploitation)의 균형을 조절함.
1️⃣ Epsilon-Greedy (ε-그리디) 탐색법
- 확률
ε에 따라 탐색(랜덤 행동 선택)과 활용(최적 행동 선택)을 결정하는 방식. ε은 학습이 진행될수록 감소하도록 설정하여 초반에는 탐색을 많이 하고 후반에는 최적 정책을 따르게 함.- CartPole에서 많이 사용하는 행동 선택 방식이다.
2️⃣ Softmax Policy 기반 행동 선택
- Q값이 높은 행동을 확률적으로 더 자주 선택하는 방식.
- softmax() 함수를 사용하여 모든 행동의 선택 확률을 부드럽게 조절함.
📊 결과 및 분석
🔹 Q-table 이산화 수준(Binning)에 따른 학습 성능 변화
처음에는 bin 값을 5로 설정하여 학습을 진행했으나, Q-table이 너무 거칠어져 학습이 제대로 이루어지지 않았다.
CartPole 환경에서 연속적인 상태를 이산화(Discretization)하여 학습하는 방식이기 때문에, bin 개수가 작을수록 Q-table의 해상도가 낮아지고 학습 성능이 저하되는 현상이 발생하였다.
이후 bin 값을 점차 증가시키면서 실험을 진행하였으며, Q-table이 세밀해질수록 학습 성능이 향상된다는 것을 확인할 수 있었다. 하지만 bin 값이 너무 커지면 메모리 사용량과 학습 시간이 급격히 증가하는 문제가 발생하였으며, 결과적으로 bin=20이 적절한 균형을 유지할 수 있는 최적의 값이었다.
🔹 행동 선택 방식 비교 (Epsilon-Greedy vs Softmax)
이번 실험에서는 행동 선택 방식에 따른 학습 성능 비교를 진행하였다.
두 가지 방식(Epsilon-Greedy, Softmax)을 적용하여 학습을 수행하고, 각 방식의 학습 성능 및 수렴 속도를 비교하였다.
✅ Epsilon-Greedy 방식
- 탐색률(ε)을 점진적으로 감소시키면서 최적 행동을 찾아가는 방식으로 학습이 진행됨.
- 학습이 진행될수록 탐색(Exploration)을 줄이고 최적 행동(Exploitation)을 강화하여 안정적인 정책을 형성함.
- 결과적으로 Softmax 방식보다 더 빠르게 학습이 진행되었으며, 최종적으로 더 높은 성능을 기록하였다.
✅ Softmax 방식
- Q값을 확률 분포로 변환하여 행동을 선택하는 방식으로 학습이 진행됨.
- 특정 행동이 절대적으로 선택되지 않고, 학습 과정 내내 일정한 확률로 모든 행동이 선택될 가능성이 존재함.
- Epsilon-Greedy 방식에 비해 최적 행동으로 빠르게 수렴하는 속도가 다소 느렸으며, 최종 성능도 낮았다. 즉 한계가 명확했다.
📌 결론:
결과적으로 모든 방식에서 학습이 원활하게 진행되었으며, CartPole의 목표를 성공적으로 달성할 수 있었다.
그중에서도 Epsilon-Greedy 방식이 학습 속도와 최종 성능 측면에서 더 우수한 결과를 보였다.
반면, Softmax 방식은 탐색이 지속적으로 이루어지지만, 일정 한계를 넘어서면 새로운 탐색을 시도하는 빈도가 줄어드는 경향이 나타났다. 즉, Softmax 방식은 현재의 최적 정책을 유지하려는 성향이 강해져, 더 높은 보상을 얻기 위한 도전이 제한되는 모습을 보였다.
반대로, Epsilon-Greedy 방식은 학습이 진행되면서도 지속적인 탐색을 수행하며, 더 나은 보상을 찾기 위해 시도하는 빈도가 높았다. 이러한 특성 덕분에 Epsilon-Greedy 방식이 보다 유연한 학습을 가능하게 하였으며, 최적 정책을 찾는 데 있어 더 효과적인 결과를 보였다.
위 영상은 Epsilon-Greedy 방식의 영상이다.
🔹 Epsilon-Greedy에서 가우시안 노이즈 적용 실험
추가적으로 Epsilon-Greedy 방식에서 Q값에 가우시안 노이즈(Gaussian Noise)를 추가하는 실험을 진행하였다. 가우시안 노이즈를 적용하면 비슷한 Q값을 가진 행동 간에 선택 확률이 조금씩 변할 수 있도록 조정하는 역할을 한다.
하지만 실험 결과, 일반적인 Epsilon-Greedy 방식과 성능 차이가 없다 싶을 정도로 달라지지 않았다.
즉, 가우시안 노이즈를 추가한다고 학습이 크게 달라지지는 않았으며, Epsilon-Greedy만으로도 충분한 학습 성능을 확보할 수 있었다.
📈 WandB 그래프 비교 (Epsilon-Greedy vs Softmax)
아래 그래프는 Epsilon-Greedy 방식과 Softmax 방식의 학습 진행 과정을 비교한 그래프로 각 방식에서 가장 학습이 잘 진행된 그래프들을 비교한 것이다.
각 실험에서 최소 보상(Min Reward), 최대 보상(Max Reward), 평균 보상(Average Reward)을 기록하여 학습 성능을 비교하였다. 그래프에서 파란색 선이 Epsilon-Greedy 방식, 주황색 선이 Softmax 방식을 나타낸다.
보상(Reward)은 막대가 쓰러지지 않고 오래 버틸수록 더 많이 획득되므로,
그래프에서 보상이 높을수록 더 오래 살아남아 CartPole의 목표를 성공적으로 달성한 것을 의미한다.
즉, 그래프의 보상이 높게 형성될수록 해당 방식이 더 효과적으로 학습되었음을 나타낸다.
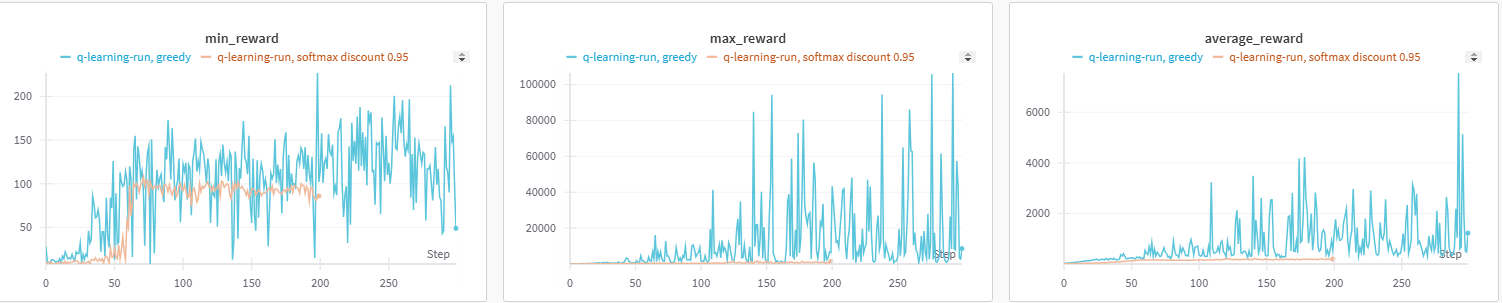
Epsilon-Greedy 방식은 무려 10분 이상을 버티며 Reward를 획득하여 100,000 이상을 얻은 결과도 있다.
🎓 마무리 및 추가 실험 가능성
이번 실험에서는 Q-learning을 적용하여 CartPole 환경에서의 학습 성능을 분석하였다.
Epsilon-Greedy 방식과 Softmax 방식을 비교한 결과, Epsilon-Greedy 방식이 더 효과적으로 학습되었으며,
탐색과 활용의 균형을 유지하면서도 더 높은 보상을 기록하는 경향을 보였다.
하지만 일반적으로 CartPole 문제는 DQN(Deep Q-Network)을 활용하여 해결하는 경우가 많다. 따라서, 앞으로는 DQN을 사용한 CartPole 학습을 진행하여 성능을 비교할 예정이다. DQN을 활용하면 신경망을 통해 연속적인 상태 공간을 직접 처리할 수 있어, Q-table을 사용하는 Q-learning보다 더 확장성이 높은 방식을 실험할 수 있을 것으로 기대된다.
또한, CartPole을 포함하여 클래식 컨트롤(Classic Control) 문제 5가지에 도전할 예정이다.
OpenAI Gym의 대표적인 클래식 컨트롤 환경은 다음과 같다.
- CartPole-v1 (현재 실험 진행 완료)
- Acrobot-v1
- MountainCar-v0
- Pendulum-v1
- LunarLander-v2
[참고] https://www.gymlibrary.dev/environments/classic_control/
