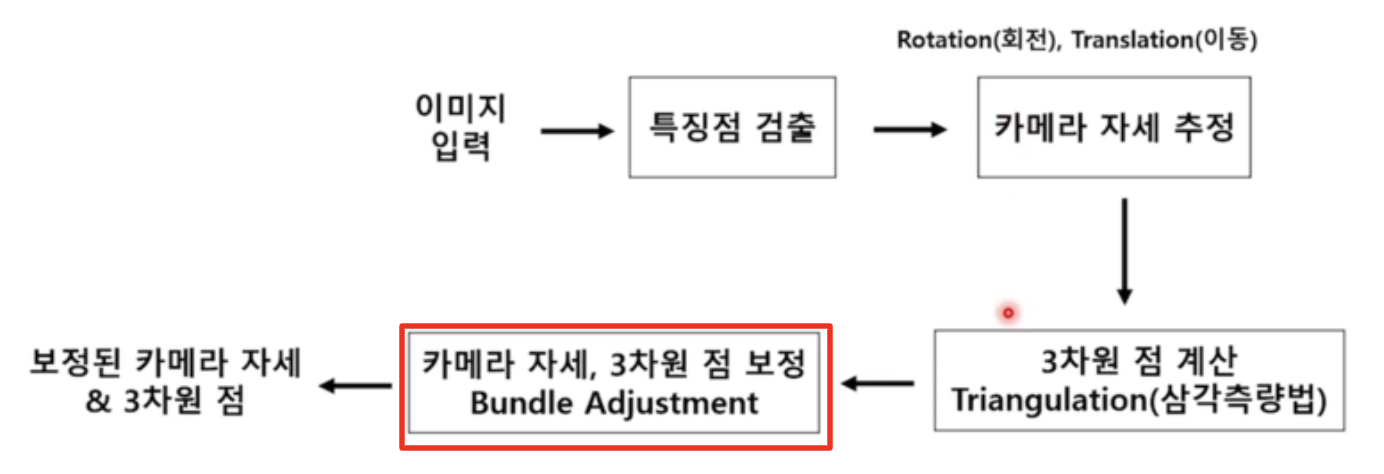
bundle adjustment
- ba는 reprojection error를 최소화시키도록 3차원 포인트의 위치 및 카메라의 위치를 최적화하는 과정
- reprojection error: 맵 상의 3차원 포인트들을 keyframe 이미지들에 projection 시킨 위치와 해당 영상 프레임에서 실제 관측된 위치의 차이
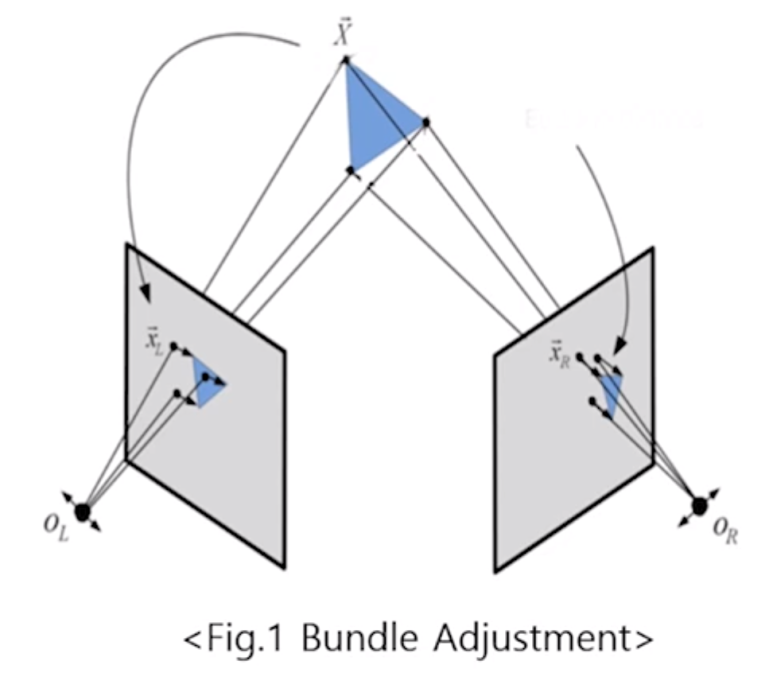
- reprojection error: 맵 상의 3차원 포인트들을 keyframe 이미지들에 projection 시킨 위치와 해당 영상 프레임에서 실제 관측된 위치의 차이
ORB SLAM에서 ba
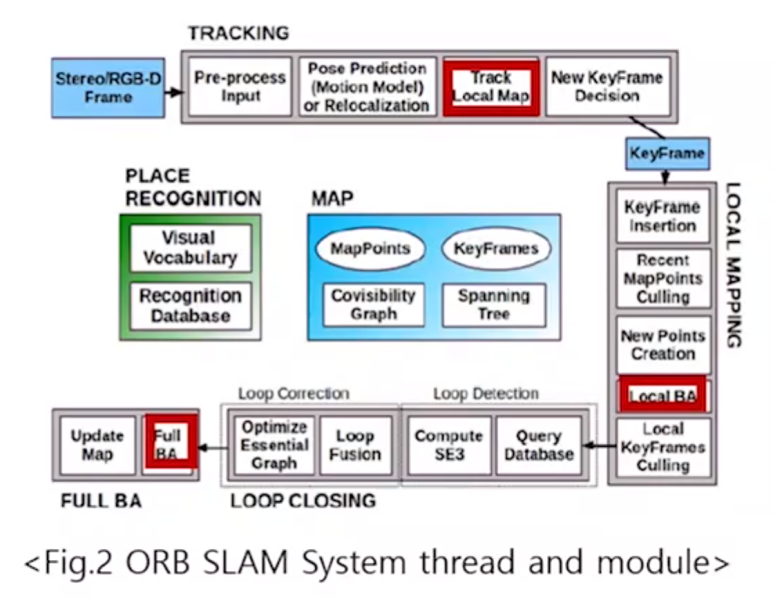
tracking(motion only ba)
- 카메라 포즈 최적화
- 3차원 점을 2차원 점으로 투영시킨 후 --> Rotation과 translation 구함(2차원 점과의 차이가 최소화 되는 경우)
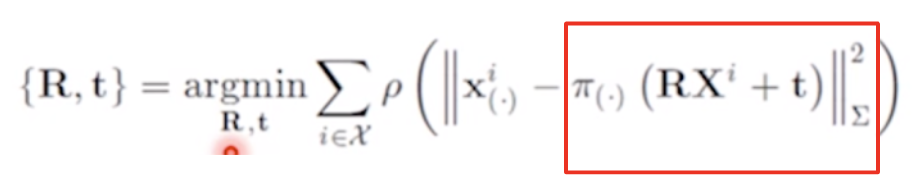
해당 박스가 3차원 점을 2차원 점으로 투영 시킨 값
Local mapping(Local BA)
- local map에 대한 키프레임과 맵 포인트 최적화
- 각각의 keyframe에 대해 위치를 보정
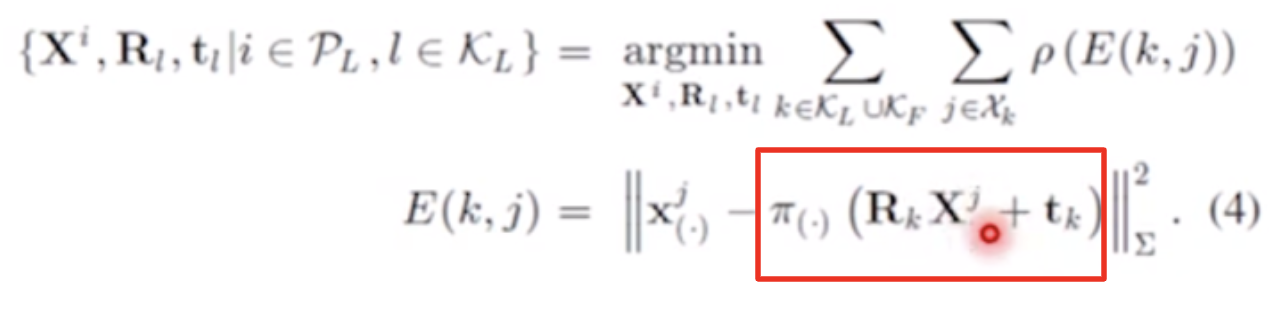
현재의 카메라 뿐만 아니라 모든 key frame에 대해 카메라 위치 보정
tracking과 마찬가지로 박스 부분은 해당 frame에서 3차원 점을 2차원 점으로 투영 시킨 값
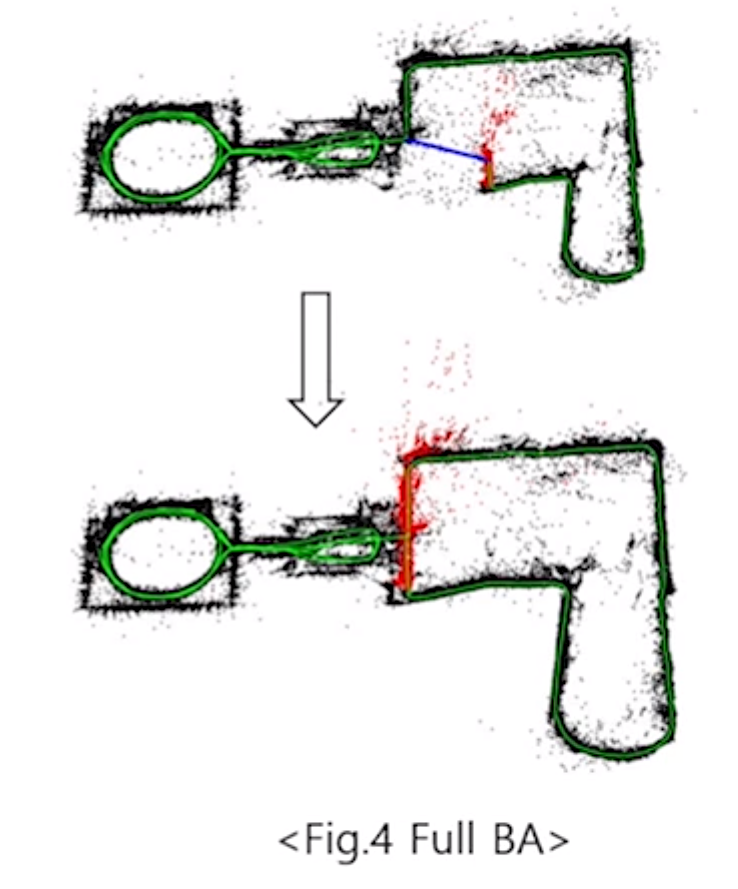
loop closing(Full BA)
- 루프 클로징 이후 모든 키프레임과 맵 포인트 최적화
- 맵 생성시 누적된 오차 수정
- 수식은 Local BA식에서 모든 키프레임과 포인트로 확장