자율주행(Ex. slam ...)
1.linux 명령어

yy: 현재 행 복사P: 밑에 붙여 넣기
2.파이썬 기본
name현재 파일 스크립트 파일이 프로그램의 시작점이 맞는지 판단
3.orb slam
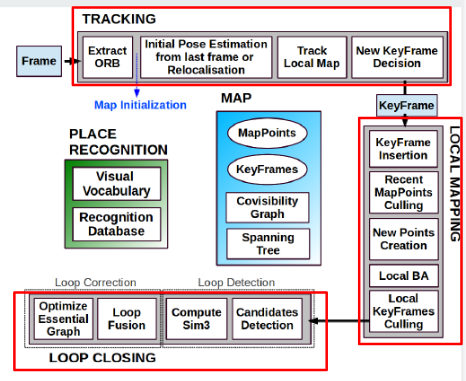
정의동시적 위치 추적 및 지도 작성 기술이동할 때 주변을 탐색하면서 지도를 작성하고 자신의 위치 파악 visual slam정의영상 정보를 센서로 활용하는 slam장점: 값이 쌈단점: 연산량 많음종류Monocular: 1개의 단안 카메라Stereo: 2개의 고정된 카메라
4.특징점 추출
특징점 추출특징점 추출정의영상에서 물체 추적 or 인식 --> 영상과 영상 매칭 위해 주요 특징점(key point) 뽑아서 매칭corner point: 물체 형태, 위치, 조명 등이 변해도 쉽게 찾아낼 수 있는 keypoint종류harris corner작은 윈도우 이
5.slam
정의동시적 위치 추적 및 지도 작성 기술특징지도를 작성(임의의 공간에서 이동할 때)자신의 위치 파악종류 visual slam(카메라 센서)정의카메라 및 영상 센서로 획득한 영상을 사용함장점: 값이 쌈단점: 연산량 많음종류Monocular: 1개의 단안 카메라Stereo
6.SolvePnP
Represent camera motiontranslation카메라가 3차원 공간에서 이동한 경우, 이동량을 translation3차원점 (x, y, x)에서 (x', y', z')으로 이동 --> translation은 vector = (x'-x, y'-y, z'-z
7.Bag of Words
정의문서를 자동으로 분류하는 방법 중 하나문서 내의 단어의 빈도와 분포를 보고 어떤 종류의 문서인지 판단Ex) 미드필더, 골기퍼, 심판 --> 축구과정등장하는 단어로부터 단어장을 생성해 출현 횟수 측정출현 빈도로 히스토그램 작성히스토그램으로부터 문서 속성 분류
8.Bundle Adjustment
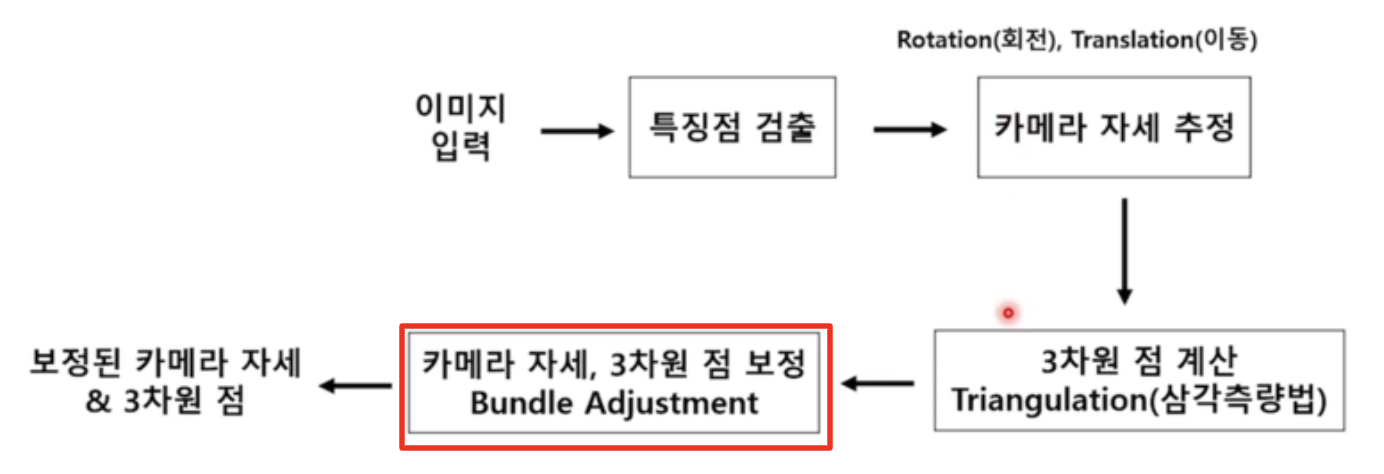
ba는 reprojection error를 최소화시키도록 3차원 포인트의 위치 및 카메라의 위치를 최적화하는 과정reprojection error: 맵 상의 3차원 포인트들을 keyframe 이미지들에 projection 시킨 위치와 해당 영상 프레임에서 실제 관측된
9.ubuntu
화면 녹화화면 녹화 시작: Ctrl+Alt+Shift+R 녹화 종료: Ctrl+Alt+Shift+R
10.Minicom
주로 임베디드 보드와 host pc에서 시리얼 통신 할때 사용됨임베디드 보드에서 일어나는 일들을 그 장비에서 보기 어렵기 때문에, 시리얼 통신을 통해 pc와 연결하여 확인할 수 있게 해줌