edge detection
-
용어
- edge pixel: 이미지 intensity가 급격하게 변하는 픽셀
- edge: edge pixel 집합
-
에지 검출 방법
- 1차원 영상
- 1차 미분 사용 --> 1차 미분 했을 때 0이 아닌 부분을 활용
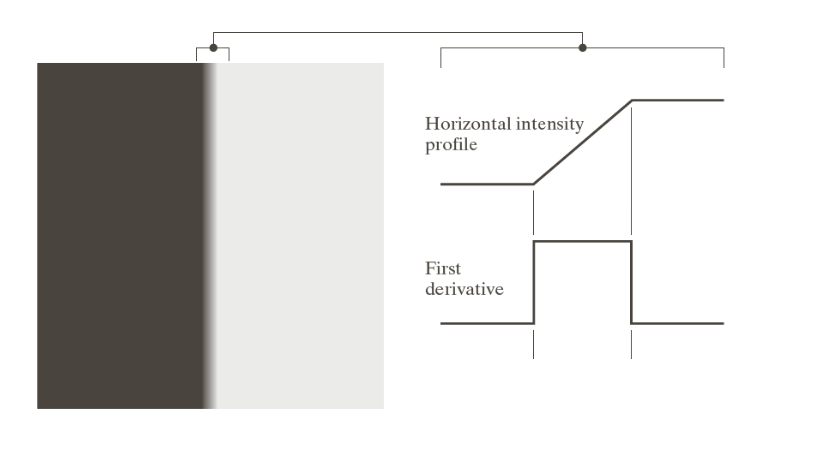
- 1차 미분 사용 --> 1차 미분 했을 때 0이 아닌 부분을 활용
- 2차원 영상
- image gradient 사용
- 용어
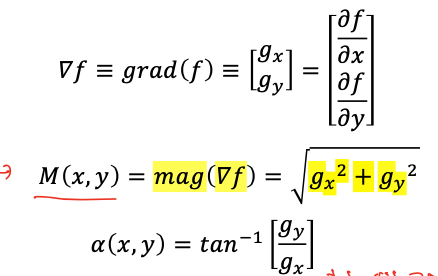
1. gradient: x축 방향으로 편미분하고, y축 방향으로 편미분 한 값으로 이루어져 있는 벡터
2. gradient 크기: 미분 값을 제곱해서 더한 후 루트 씌운 값
3. gradient 각도: arctan x/y 값
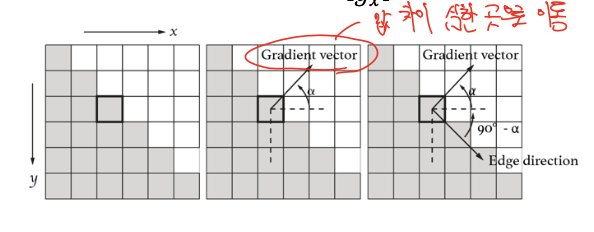
- gradient vector 이동
- gradient 방향: 현재 픽셀에서 가장 급격하게 변하는 방향
- 에지 방향: gradient 방향과 수직
- gradient와 gradeint 방향을 구하면 에지의 방향 검출 가능 --> 대각선 픽셀끼리 같은 에지가 검출되면 해당 부분은 에지로 판단할 수 있음!
- 용어
- image gradient 사용
- 1차원 영상
-
종류
-
선행조건: 잡음이 있을 경우 미분값이 정확하지 않으므로 noise filtering 후 에지 검출을 수행
-
sobel operator
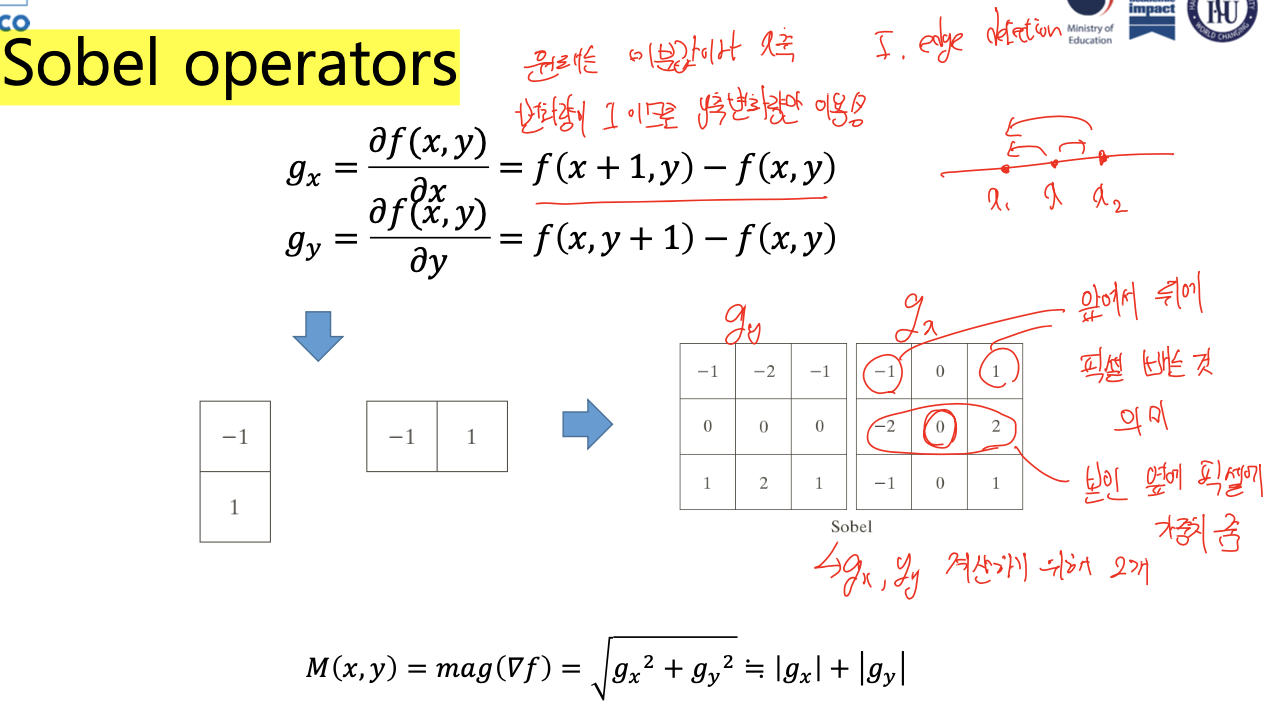
- 소벨필터로 중심값에 더 큰 가중치를 주어 smoothing 효과를 주고, 값의 차이를 크게 만들어 edge가 잘 검출 되도록 함
- Thresholding on magnitude of gradient....?(임계값)

- Thresholding on magnitude of gradient....?(임계값)
- 소벨필터로 중심값에 더 큰 가중치를 주어 smoothing 효과를 주고, 값의 차이를 크게 만들어 edge가 잘 검출 되도록 함
-
canny edge detector
-
순서
-
가우시안 필터를 사용하여 영상 내 잡음 제거
-
소벨 에지 마스크 활용하여 gradient 크기와 각도 계산
-
nonmaxima suppression 수행 --> edge가 두꺼워지는 것을 방지하여 edge를 얇게 유지해줌
- gradient 방향으로 𝛼(𝑥, 𝑦)와 인접한 픽셀들을 찾는다. (𝛼 : gradient direction)
- 𝛼(𝑥, 𝑦)가 인접한 픽셀들의 gradient 크기보다 작다면 제거한다.(값을 0으로 만든다. → 𝛼(𝑥, 𝑦)가 엣지가 될 가능성이 사라진다.)
- 따라서, 주변 픽셀들 중 최대치만 남기고 최대치가 아닌 nonmaxima 성분을 제거하는 것이다.

-
double thresholding 수행 & connectivity analysis to detect and link edges
1. M(x,y) >= Th -> edge
1. Th, Tl은 사용자가 정의- M(x,y) < Tl -> non-edge
- 사이값 -> edge라고 판별된 픽셀과 연결되어 있으면 edge, 그렇지 않은 경우는 non-edge로 간주
int main() { Mat image, canny; image = imread("lena.png", 0); //performs canny edge detection //image: input Mat, canny: output Mat //190: Thresh_low of double thresholding //200: Thresh_high of double thresholding //3: aperture size of the Sobel operation Canny(image, canny, 190, 200, 3); imshow("Input image", image); imshow("canny", canny); waitKey(0); }
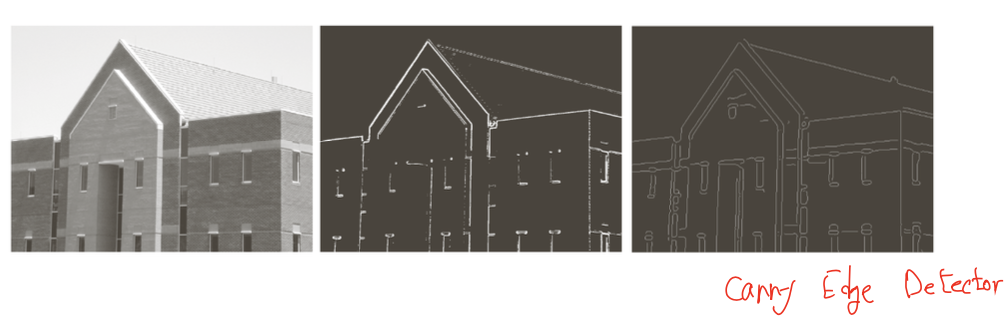
위의 canny edge detector 경우 소벨 에지보다 적은 수의 픽셀만 에지라고 판단됨
-
-
-
line detection
-
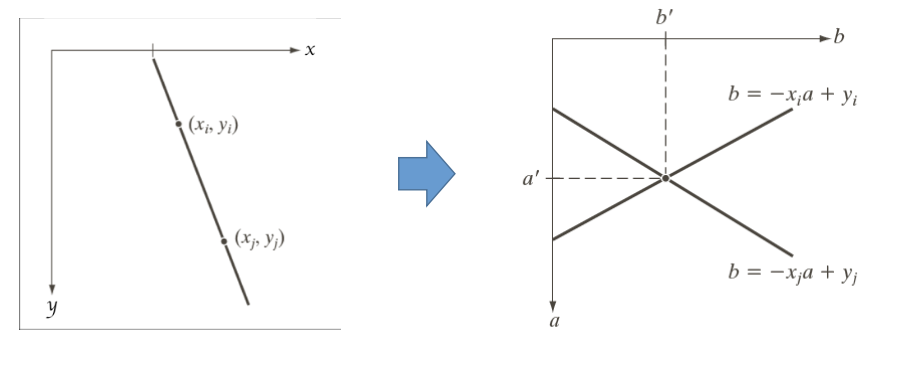
허프 변환 개념
- y=ax+b -> b=-ax+y
- 한 점이 가질 수 있는 직선을 a와 b의 평면에 하나의 직선으로 나타냄
- y=ax+b는 x=k와 같은 직선을 나타낼 때 a가 무한대가 되므로 --> b =-ax+y의 형태로 바꿈
- 에지 영상에서 가능한 (a,b) 조합을 구함
- 각 에지 픽셀이 통과하는 직선을 모두 찾은 다음 (a,b)의 조합이 여러번 활용될 경우 그것이 영상에 존재하는 선의 방정식일 확률이 높음
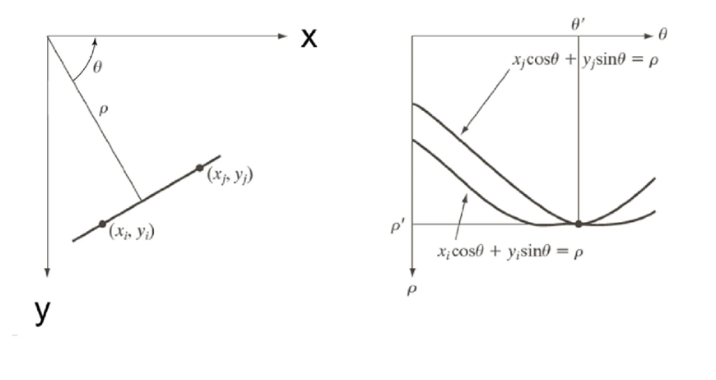
- b=-ax+y 직선의 값을 𝜌와𝜃를 이용하여 𝜌𝜃 값으로 나타낼 수 있음(= 𝑥𝑐𝑜𝑠𝜃 + 𝑦𝑠𝑖𝑛𝜃 = 𝜌, 이렇게도 변환 가능)
- 𝜌: 원전에서 직선에 수선을 내렸을 때 수선의 길이
- 𝜃: p와 x축이 이루는 각도
- y=ax+b -> b=-ax+y
-
알고리즘
- 이진 영상으로 변환
- 에지 영상 획득
- 𝜌𝜃 평면에서 구획 지정 -> 𝜌와𝜃 간격 설정
- 에지를 이루는 점들에 대하여 𝜌와𝜃를 계산하여 각 구획에 vote
- 문턱값 이상의 vote를 받은 구간에서의 𝜌와𝜃를 직선으로 간주

-
원 검출
- 허프 변환을 원에 대해서도 동일하게 적용 가능
- (𝑥 − 𝑐1)^2+(𝑦 − 𝑐2)^2= 𝑐3 원의 방정식에서 c1, c2, c3가 반복적으로 사용된다면 패러미터들이 표현하는 원 검출
-
코드
HoughLines
int main() { Mat image, edge, result; float rho, theta, a, b, x0, y0; Point p1, p2; vector<Vec2f> lines; image = imread("chess_pattern.png"); result = image.clone(); cvtColor(image, image, CV_BGR2GRAY); Canny(image, edge, 50, 200, 3); // line detection 전에 edge detection 수행 //applying Hough Transform to find lines in the image //edge: input Mat, lines: output vector of lines //1: (rho) distance resolution of the accumulator in pixels //CV_PI/180: (theta) angle resolution of the accumulator in radians //150: (threshold) accumulator threshold parameter //minimum angle to check for lines. Must fall between 0 and max_theta. //maximum angle to check for lines. Must fall between min_theta and CV_PI HoughLines(edge, lines, 1, CV_PI / 180, 150,0,CV_PI); for (int i = 0; i < lines.size(); i++) { // line 그리는 작업 rho = lines[i][0]; theta = lines[i][1]; a = cos(theta); b = sin(theta); x0 = a * rho; y0 = b * rho; p1 = Point(cvRound(x0 + 1000 * (-b)), cvRound(y0 + 1000 * a)); p2 = Point(cvRound(x0 - 1000 * (-b)), cvRound(y0 - 1000 * a)); line(result, p1, p2, Scalar(0, 0, 255), 3, 8); } imshow("Input image", image); imshow("edge", edge); imshow("Hough Transform", result); waitKey(0); }HoughLinesP
int main() { Mat image, edge, result; vector<Vec4i> lines;image = imread("chess_pattern.png"); result = image.clone(); cvtColor(image, image, CV_BGR2GRAY); Canny(image, edge, 50, 200, 3); //edge: input Mat, lines: output vector of lines //1: (rho) distance resolution of the accumulator in pixels //CV_PI/180: (theta) angle resolution of the accumulator in radians //50: (threshold) accumulator threshold parameter //10: (minLineLength) minimum line length. //300: (maxLineGap) Maximum allowed gap between points on the sa me line to link them HoughLinesP(edge, lines, 1, CV_PI / 180, 50, 10, 300); for (int i = 0; i < lines.size(); i++) { Vec4i l = lines[i]; line(result, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(0, 0, 255), 3, 8); } imshow("Input image", image); imshow("edge", edge); imshow("Hough Transform", result); waitKey(0);}
-
HoughLines()와 HoughLinesP()의 차이
- HoughLines()는 rho와 theta를 계산하여 직선을 반환
- 결과
- vector lines
- i번째 라인의 값은 i번째 검출된 라인의 rho와 theta 값을 가진다.
- default parameters:
- HoughLines()는 rho와 theta에 대해 default 값을 가진다.
- 이 값들은 minimum과 maximum angle을 체크하기 위한 것이다.
- 결과
- HoughLinesP()는 각 라인의 두 점을 계산하여 직선을 반환
- vector lines
- i번째 라인의 값은 한 점에 대해 (x,y) 값을 가지고 다른 (x, y) 값은 다른 i번쨰 검출된 직선의 값이 된다.
- HoghLinesP()는 minimum line length와 같은 line segment에 대해서 default parameter를 가진다

- HoughLines()는 rho와 theta를 계산하여 직선을 반환
