ORB SLAM(Oriented FAST and Rotated BRIEF)
- ORB SLAM
- 정의
- feature-based slam
- ORB 특징점 검출방식 사용
- FAST 알고리즘, BRIEF 알고리즘, 해리스 코너 알고리즘 결합한 알고리즘
- 장점
- 3개의 thread를 활용하여 속도가 빠름 --> 많은 연구들이 orb-slam 기반으로 이루어지고 있음
- 실시간 데이터 처리 용이
- 정의
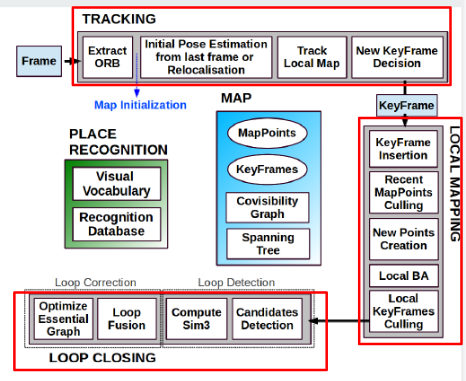
ORB slam 구조
- 3개의 thread를 활용 --> 속도 빠름
- 프로세스(process): 단순히 실행 중인 프로그램
- 스레드(thread): 프로세스 내에서 실제로 작업을 수행하는 주체
- 모든 프로세스에는 한 개 이상의 스레드 존재하여 작업을 수행
- 멀티스레드 프로세스: 두개 이상의 스레드를 가지는 프로세스
- 3 Thread
- Trackig thread
- 지도에서 현재 위치 찾음 --> 기존의 지도정보와 ORB Feature를 활용하여 현재 위치 추정
- local mapping
- 각각의 keyFrame 정보를 지도에 mapping(2d point --> 3d point)
- loop closing
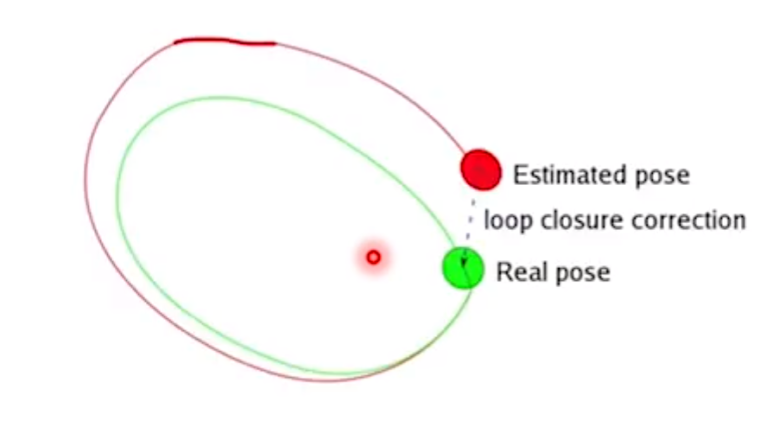
- 영상정보를 통해 지도 만들다보면 drift 현상 발생(위치 어긋남)
- Slam으로 만들어진 지도 정보를 통해 현재 위치 교정
- Trackig thread
3 thread
Tracking Thread
- tracking thread
- tracking
- 정의
- 비디오 영상에서 특정 대상의 위치 변화 추적
- 비디오는 일련의 영상 프레임으로 구성 --> 인접한 영상 프레임 사이에는 유사성이 존재 ==> 이러한 유사성을 이용하여 특정 대상의 위치 변화 추적
- 정의
- orb slam에서 tracking
- 영상에서 특징점을 추출하여 key frame을 생성하고, 카메라의 위치를 추정하는 과정
- orb-slam에서는 물체 추적보다는 카메라 위치를 추정
- 물체는 가만히 있고 카메라(ex. 자동차)가 움직임
- key frame: 유의미한 특징점을 많이 가지는 frame(지도를 만드는데 중요한 정보를 담고 있는 frame)
- orb-slam에서는 물체 추적보다는 카메라 위치를 추정
- 영상에서 특징점을 추출하여 key frame을 생성하고, 카메라의 위치를 추정하는 과정
- 과정
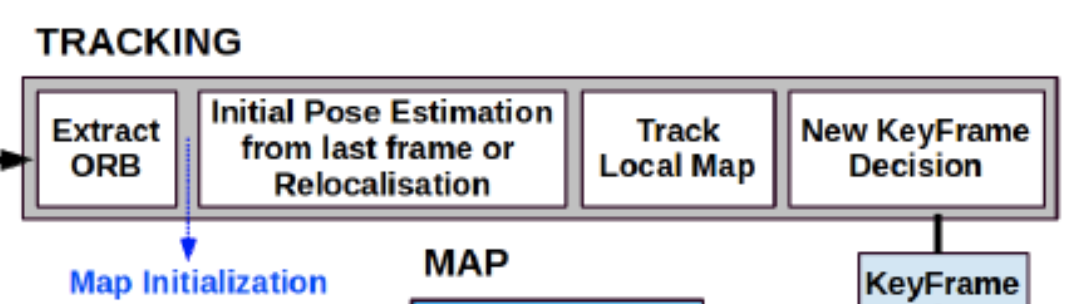
- orb 추출
- 정의
- input 영상 전처리 과정
- orb feature descriptor 이용하여 영상 내 특징점 검출
- 정의
- Map Initialization
- 정의
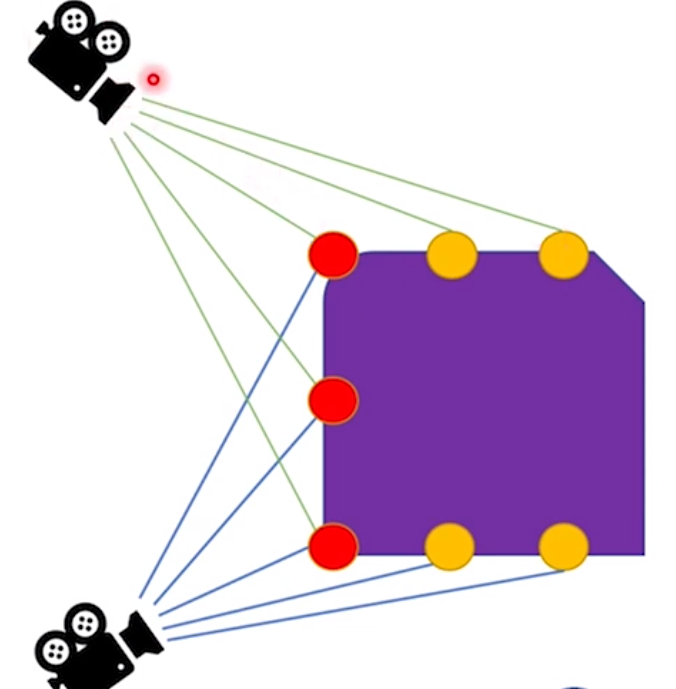
- 이전 Frame과 현재 Frame간의 Feature Matching을 통해 3D Point 생성
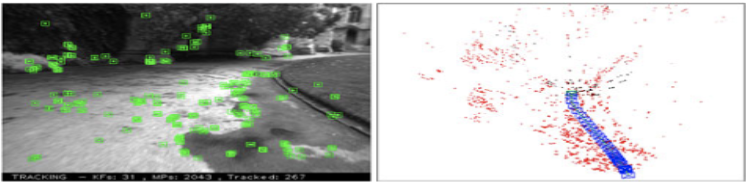
왼쪽 사진 초록색 부분이 한 Frame의 Feature들이고, 오른쪽 빨간 점들이 3D Map Point들임
- 이전 Frame과 현재 Frame간의 Feature Matching을 통해 3D Point 생성
- 정의
- pose estimation(or relocalisation)
- 정의
- 카메라의 위치 추정하는 단계
- 상황별 접근 방법
- tracking이 잘되는 경우
- 이전 frame을 통한 위치 추정
- constant velocity motion model 이용하여 카메라 위치 추정(등속도로 움직인다는 가정) --> pose optimization(위치 추정)
- tracking이 lost된 경우(global relocalizaion)
- back of words를 활용하여 현재 영상과 가장 유사한 key frame 찾음 --> tracking 회복
- 찾은 key frame을 바탕으로 solvePnP를 이용하여 카메라 위치 추정 --> pose optimization
- tracking이 잘되는 경우
- 정의
- track local map
- 사전에 생성한 지도 정보를 투영 --> 더 정확한 카메라 pose 추정
- new keyframe decision
- 특정 4가지 조건 모두 충족시 key frame으로 결정
- 특징점이 어느정도 이상 되어야함
- 직전 frame과 유사하다면 현재 frame을 key frame으로 지정할 이유가 없음 --> 이전 frame과 유사성 비교
- 특정 4가지 조건 모두 충족시 key frame으로 결정
- orb 추출
- tracking
Local Mapping Thread
- local mapping thread
- 정의
- 중복되는 key frame과 tracking 후에 생성된 map point들을 최적화
- 새로 들어오는 key frame을 아래의 순서로 처리하는 과정
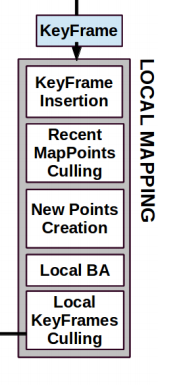
- 과정
- keyframe 삽입
- tracking thread에서 새로운 key frame이 생성되면 해당 bag of words 계산
- 이를 바탕으로 새로운 key frame과 원본 영상 프레임의 map point 비교
- covisibility graph를 update함
- covisibility graph
- 정의
- 두 대 이상의 시점에서 겹치는 부분의 개수를 표현한 것
- 특징
1. 각 카메라의 영사 정보를 사용하고 상관관계를 파악하여 실제와 최대한 비슷하게 지도를 만들 수 있음
- 정의
- covisibility graph
- recent map point 선별
- tracking 과정 후 생긴 map point와 새로 삽입된 key frame을 비교하여 bad point 제거
- low visibility, not trackable 점
- tracking 과정 후 생긴 map point와 새로 삽입된 key frame을 비교하여 bad point 제거
- new points 생성
- 앞에서 수정된 covisibility graph를 이용하여 현재 프레임과 연결되어 있는 프레임들을 찾음
- 찾은 프레임과 현재 프레임의 map point쌍을 이용하여 triangulate함
- triangulate 과정 후 생긴 프레임의 map point 생성
- triangulation(삼각 측량법): 두 이미지 평면 사이의 기하학적 관계가 주어지고, 두 이미지 평면상의 매칭쌍 p1, p2가 주어지면 이로 부터 원래의 3d 공간좌표 p를 결정할 수 있다는 것을 의미
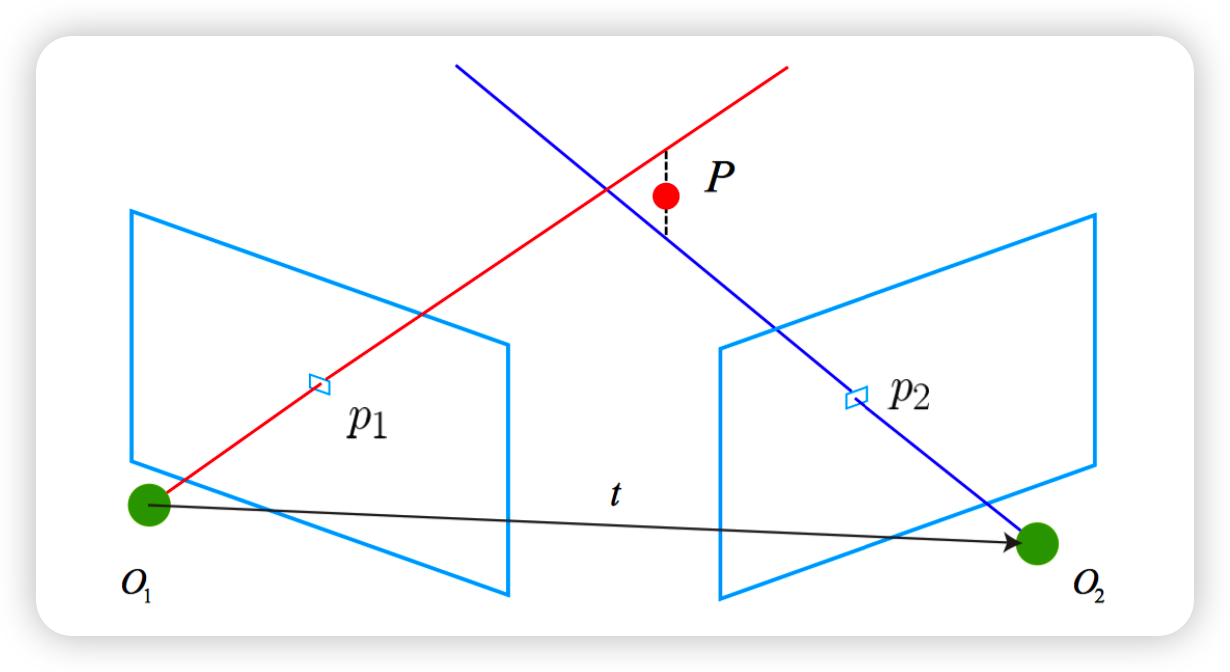
- triangulation(삼각 측량법): 두 이미지 평면 사이의 기하학적 관계가 주어지고, 두 이미지 평면상의 매칭쌍 p1, p2가 주어지면 이로 부터 원래의 3d 공간좌표 p를 결정할 수 있다는 것을 의미
- Map point들 중 현재 프레임과 covisibility graph상에서 연결되어 있는 map point들만 project 시킴
- 그 후, covisibility graph를 다시 update함
- local ba
- map point 개수를 최적화 하는 과정
- 현재 key frame과 covisibility 관계에 있는 key frame을 찾음
- 각 프레임들을 비교하여 같은 곳을 표시하는 map point 연결하고, 그러지 못한 map point는 outliers로 판단하여 제거
- local keyframe 선별
- 다음과 같은 제약을 두어 key frame 개수 제한함
- 다른 3개의 프레임에서 map point가 90% 이상 겹치는 key frame들은 버림
- key frame이 너무 많으면 relocalization과 BA의 효과가 적어짐
- keyframe 삽입
- 정의
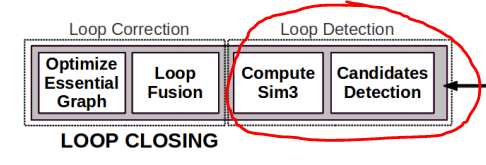
Loop Closing Thread
- loop closing thread
- 정의
- 이전에 방문한 적 있는 공간인지를 확인 --> 방문했던 공간이라고 판단되면 이전에 생성된 지도와 통합
- 이전에 방문한 적 있는 공간인지를 확인 --> 방문했던 공간이라고 판단되면 이전에 생성된 지도와 통합
- 특징
- 에러가 누적되면 사전의 방문된 공간이 다른 위치로 나옴
- place recognition을 통해 이전의 방문했던 공간인지 확인
- Place recognition
- bag of words 방법 사용
- 종류
- visual vocabulary
- 많은 이미지들로부터 feature 추출 후, descriotor 모으고 descriptor들을 몇개씩 묶음 --> clustering 한 가운데 값을 vocabulary라고 함
- recognition database
- keyframe 생성 시, visual vocabulary를 사용해 keyframe에 대한 이미지 특징을 표현한 data를 만들어 저장
- keyframe 생성 시, visual vocabulary를 사용해 keyframe에 대한 이미지 특징을 표현한 data를 만들어 저장
- visual vocabulary
- loop detection
- 현재 keyframe에서 나온 visual vocabulary를 후보군 안에 모든 data와 비교하여 진행(recognition database를 후보군으로)
- 동일한 장소라고 판단되는 일정한 기준을 만족하면 지도 통합
- 정의
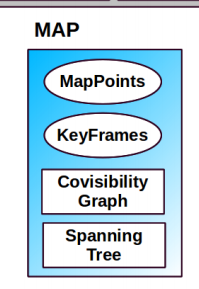
Map data
- 정의
- orb slam으로 부터 생성되는 데이터 중 하나
1. orb slam으로 부터 2가지 데이터가 생성 됨
1. place recognition
2. map data
- orb slam으로 부터 생성되는 데이터 중 하나
- 종류
- map point
- 정의
- frame에서 검출된 feature들을 3d로 지도에 mapping한 point
- 각 map point(pi)가 가지는 world 좌표계 상의 pi의 위치
- 정의
- key frames
- 지도 생성시 특징이 될만한 위치를 나타내는 frame(유의미한 feature 다수 보유)
- covisibilty graph
- 정의
- key frame간의 map point 공유관계를 나타낸 graph(spanning tree)
- 정의
- map point
