특징점 추출
- 특징점 추출
- 특징점 추출
- 정의
- 영상에서 물체 추적 or 인식 --> 영상과 영상 매칭 위해 주요 특징점(key point) 뽑아서 매칭
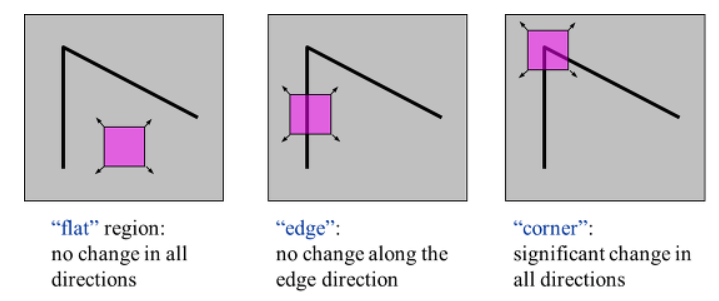
- corner point: 물체 형태, 위치, 조명 등이 변해도 쉽게 찾아낼 수 있는 keypoint
- 종류
- harris corner
- 작은 윈도우 이동 --> 코너점의 경우 모든 방향으로 영상 변화가 큼
- 장점
- 영상 평행이동, 회전 변화에는 ===> 불변
- affine 변화, 조명 변화에도 강인성 가짐
- 단점
- 영상의 크기(scale) 변화에는 영향 받음
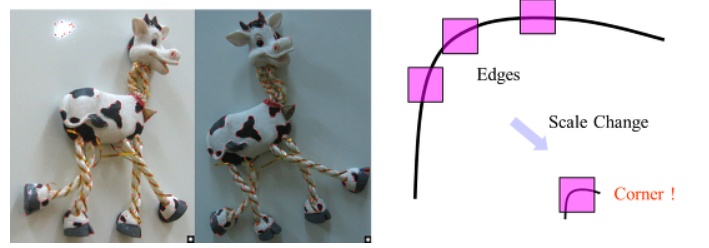
- sift
- DoG(Difference of Gaussian) 기반으로 이미지 내에서 뿐만 아니라 스케일 축으로도 코너성이 극대인 점 찾음
- 과정 --> ?
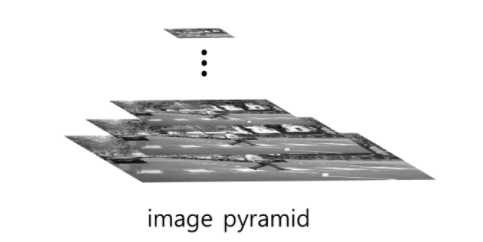
- sift에서 이미지 i가 있을 때, i의 크기를 단계적으로 축소시켜 축소된 이미지들을 생성(이미지 피라미드)
- 각 스케일의 영상마다 코너성을 조사해서 코너점을 찾음 --> 대부분 인접한 여러 영상 스케일에 걸쳐 동일한 지점이 코너점을 검출
- 그 중 스케일 축을 따라서도 코너성일 극대인 점 찾음, 이 점들을 sclae invariant한 특징점
- 장점
- 입력 이미지의 스케일이 어떻게 주어지더라도 해당 특징점 찾아낼 수 있음
- FAST(Features from Accelerated Segment Test)
- 극도의 빠름을 추구한 특징점 추출 알고리즘
- 속도에 최적화 & 특징점 품질 기존 방법들보다 뛰어남
- 과정
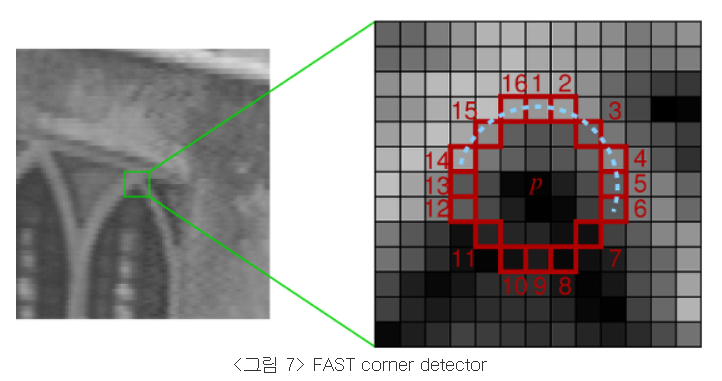
- 어떤 점 p를 중심으로 하는 반지름 3인 원 상의 16개 픽셀값을 보고 판단 --> P가 코너인지 여부를 판단
- p보다 일정 값 이상 밝은 픽셀들이 n개 이상 연속 or P보다 일정 값 이상 어두운 픽셀들이 n개 이상 연속 --> p 코너점 판단
- 특징
- n을 어떻게 잡냐에 따라서 Fast-9, Fast-10, ..., Fast-16과 같이 다양한 버전이 가능
- 연속된 점 직접 세지X --> decision tree 이용하여 빠르게 판단
- 픽셀의 밝기값을 p보다 훨씬 밝거나 어두운 경우, p와 유사한 경우 3가지 값으로 분류 --> 원주상의 픽셀들의 밝기 분포를 16차원 ternary 벡터로 표현
- 이를 decision tree에 입력하여 코너점 여부 분류
- 문제점
- 어떤 점 p가 코너점으로 인식 --> p와 인접한 주변 점들도 코너점으로 검출 ==> non-maximal suppression 후처리 사용
- non-maximal suppression: 인접한 여러 점들 중 코너성이 극대인 점만 남기고 나머지 제거
- BRIEF(Binary Robust Independent Elementary Features)Permalink
- 정의
- 특징점 검출이 아닌 기술자(descriptor)를 생성하는데 사용
- descriptor: 특징점(key point) 위치에서 추출한 지역적 영상 특징 정보(ex. gradient 분포 히스토그램)
- 특징점 주변 영역의 픽셀을 다른 픽셀과 비교해 어느 부분이 더 밝은지 찾아 이진 형식으로 저장 --> descriptor를 이진화
- 두개의 픽셀을 하나의 그룹으로 묶는 방식
- 과정
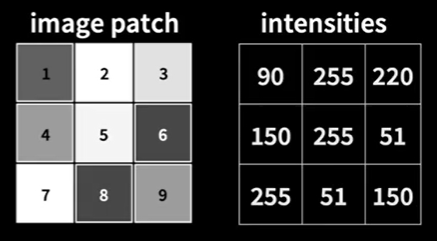
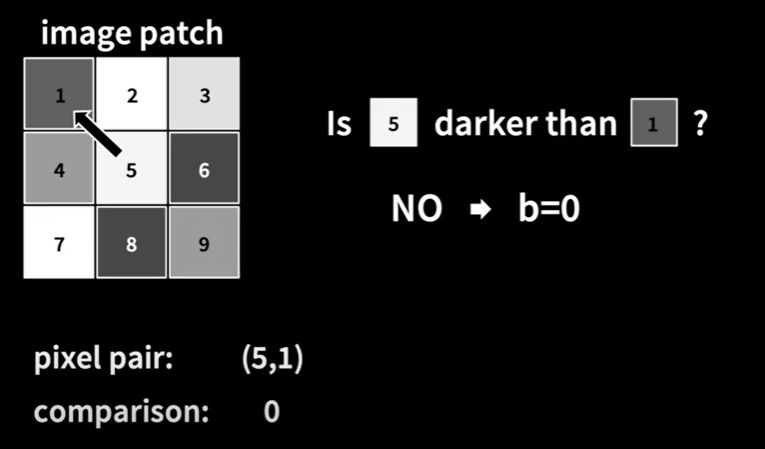
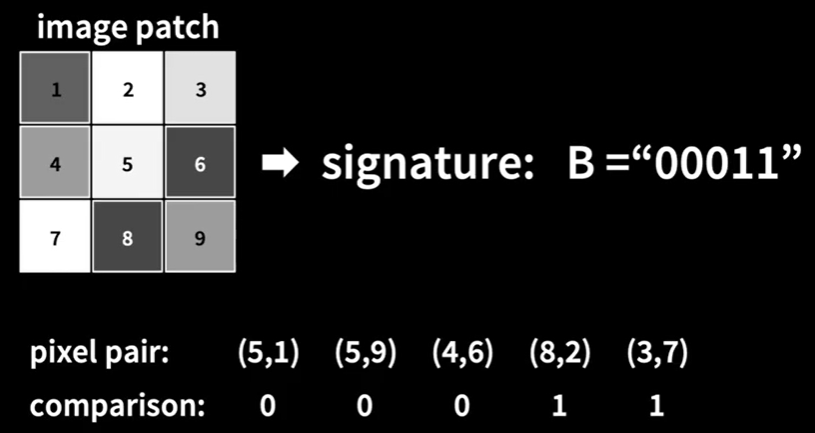
- 중심 픽셀(p)의 주변 픽셀을 2개씩 뽑아서 비교하여 descriptor 생성
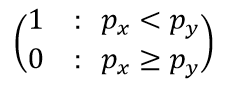
- 2개의 픽셀 값(x,y)을 비교하여 0또는 1로 표현
- 비교하여 나온 값(0 or 1)을 각 bit에 저장하여 descriptor 생성(ex. 1011100100)
- 장점
- 시점, 조명, 블러에 강함
- 단점
- 회전에 약함
- 주요 불변 특징량(descriptor) 부분에서 사용하는 특징점
