Generative Models
- Suppose we are given images of dogs
- We want to learn a probalility distribustion such that
- Generation: if we sample should look like a dog (sampling)
- Density estimation: should be high if looks like a dog, and low otherwise (anomaly detection: 이상행동감지) → discriminative model 같이 동작, GA모델은 discriminative model 포함
- Also known as, explicit models. 입력이 주어졌을 때, 얘에 대한 확률값을 얻어낼 수 있음
- c.f. implicit: 단순히 generation만 할 수 있음
- Unsupervised representation learning: We should be able to learn what these images have in common, e.g., ears, tail, etc (feature learning) → but 약간의 논란 여지 있음
- Then, how can we represent ?
- 라는 입력이 들어갔을 때 어떤 값이 나오는 것
- 를 샘플링 할 수 있는 어떤 모델
Basic Discrete Distributions
이산 분포
- Bernoulli distribution: (biased) coin flip
- = {heads, tails}
- Specify . Then .
- Write: .
- Categorical distribution: (biased) m-sided dice
- Specify , such that
- Write:
Example
- modeling an RGB joint distribution (of a single pixel)
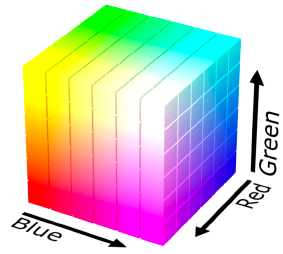
- r,g,b가 서로 independent
- number of cases?
- 256 x 256 x 256
- How many parameters do we need to specify?
-
256 x 256 x 256 -1
→ 하나의 픽셀에 대해 fully discribution 하기 위해서 필요한 파라메터의 수가 엄청 많음
-
- Suppose we have of binary pixels (a binary image) 28 x 28 = 784

- how many possible states?
- sampling from generates an image
- how many parameters to specify ?
- how many possible states?
기계학습에서, 파라미터 수가 많아질수록 학습은 더욱 더 어려움
Structure Through Independence
n개의 픽셀들이 모두 independent하다고 생각하면? (말이 안되긴 함,,, 인접한 픽셀은 비슷할 것)
- what if are independent, then
- how many possible states?
- how many parameters to specify ?
- 각각의 픽셀에 대해 파라미터 한개만 있으면 되고 independent
- entries can be described by just numbers! But this independence assumption is too strong to model useful distributions. : 파라미터의 수 →
indendent는 표현할 수 있는 이미지가 너무 적어서 일반적으로 우리가 아는 이미지 만들 수 X
그래서 우리는 과 방법 사이 어딘가 중간을 찾아야함
Conditional Independence
- Three important rules
- Chain rule
- n개의 joint distribution을 n개의 condition distribution으로 변환
- 과 이 independent 이던 아니던 상관 X
- Bayes’ rule
- Conditional independence
- if , then
- 가정: 가 주어졌을 때, 와 가 independent하다.
- Using the chain rule,
- how many parameters?
- : 1 parameter
- : 2 parameters (one per and one per )
- : 4 parameters
- Hence, , which is the same as before.
- why?
- 아무것도 바뀐 건 없음. joint distribution을 chain rule을 통해 condition distribution으로 곱으로 표현, 우리가 어떤 가정도 하지 않음 (e.g. conditional independence)
→ fully dependent 모델과 같은 수의 parameter를 가지겠네?
- 아무것도 바뀐 건 없음. joint distribution을 chain rule을 통해 condition distribution으로 곱으로 표현, 우리가 어떤 가정도 하지 않음 (e.g. conditional independence)
- Now, suppose (Markov assumption),
- 번째 pixel은 번째 pixel에만 dependent
- how many parameters?
- Hence, by leveraging the Markov assumption, we get exponential reduction on the number of parameters
- chain rule만 가지고 joint distribution을 쪼개면 파라미터 수는 달라지지 않음.
쪼갠 다음 Markov assumption하여 conditional independence를 통해서 파라미터를 로 줄임 (fully independent model 보다는 많음)
- chain rule만 가지고 joint distribution을 쪼개면 파라미터 수는 달라지지 않음.
- Auto-regressive models leverage this conditional independency
- conditional independent assumption을 어떻게 줄이느냐에 따라 파라미터 수를 잘 바꿀 수 있음
Auto-regressive Model
- Suppose we have 28 x 28 binary pixels.

- Our goal is to learn over .
- How can we parametrize ?
- Let’s use the chain rule to factor the joint distribution.
- This is called an autoregressive model
- 정보가 이전 정보들에 dependent
: Markov와 같이 이전 하나에만 dependent 해도, 전체에 다 dependent해도 autoregressive model임! - 이전 n개를 고려: AR-n 모델
- 정보가 이전 정보들에 dependent
- Note that we need an ordering of all random variables
- depent를 위해 순서가 중요!
- 이미지를 순서? 명확하지 않음 → 순서를 어케하냐에 따라 성능/방법론 달라질 수도,,
NADE: Neural Autoregressive Density Estimator
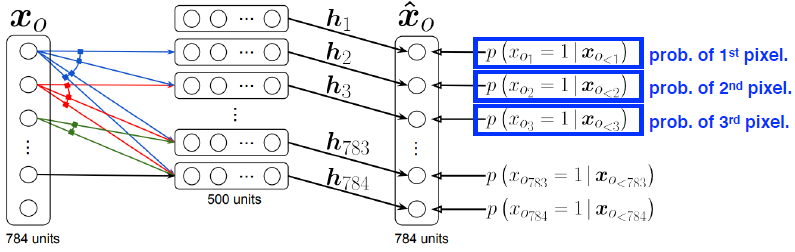
- i번째 pixel을 1번째부터 i-1까지 dependent하게 함
- 첫번째 pixel 확률분포를 어느 것에도 dependent 하지 않은 상태로 만들고
두번째 pixel에 대한 확률을 첫번째 pixel에만 dependent하게 - pixel값을 입력으로 받는 neural network를 만들어서 single scalar가 나오면 sigmoid를 통과해 0~1의 수로 만듦
- neural network 입장에서는 입력 차원이 계속 달라짐 → weight가 계속 커지게 됨
- 첫번째 pixel 확률분포를 어느 것에도 dependent 하지 않은 상태로 만들고
- The probability distribution of -th pixel is
- where
- explicit model: 입력이 주어졌을 때, 얘에 대한 확률값을 얻어낼 수 있음
- implicit: 단순히 generation만 할 수 있음
- NADE is an explicit model that can compute the density of the given inputs
- density: probability density
- how can we compute the density of the given image?
- suppose we have a binary image with 784 binary pixels, .
- Then, the joint probability is computed by
- where each conditional probability is computed independently
- joint distribution을 chain rule을 통해 conditional distribution으로 쪼개.
우리의 모델이 1번째 pixel에 대한 확률분포를 알고 있고, 첫번째 pixel이 주어졌을 때 두번째 pixel의 확률분포를 알고,... → 각각을 independent하게 다 집어넣음 - 다 곱하면 매우 작은 확률 값이 하나 나오겠지?
- In case of modeling continuous random variables, a mixture of Gaussain can be used
- binary pixel의 output은 sigmoid 통과해서 끝이지만 continuous output이라면 마지막 layer에 gaussain mixture을 활용해서 continuous distribution을 만듦
Pixel RNN
- 이미지에 있는 pixel들을 만들어낼꺼야 (generative model)
- We can also use RNNs to define an auto-regressive model.
- For example, for an RGB image,
- : Prob. i-th R
- : Prob. i-th G
- : Prob. i-th B
- R을 먼저 → G → B 순서로 만들어
이전에는 auto regressive model을 fully connected layer를 통해 만들었지만 pixel RNN은 recurrent neural network를 만듦
- There are two model architectures in Pixel RNN based on the ordering of chain
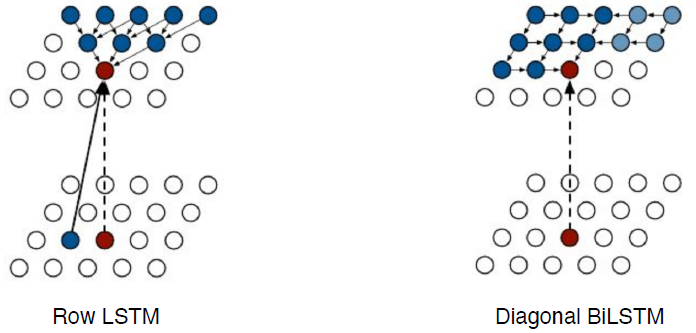
- Row LSTM: 위쪽 정보 활용
- Diagonal BiLSTM: 이전 정보 전부 활용

Hi there 👋