그리디 알고리즘
개요
- 눈앞의 이익만 취하고 보는 알고리즘
- 현재 시점에 가장 이득이 되어 보이는 해를 선택하는 행위를 반복
- 대부분 최적해와의 거리가 멀다
- 드물게 최적해가 보장되는 경우가 있다.
do {
우선 가장 좋아보이는 선택을 한다.
} until 문제의 끝까지- optimization 문제를 해결할 때 이용
: DP 또는 Greedy를 사용해서 문제를 해결- DP : 재귀방정식을 사용해서 작은 문제로 쪼개어 해결
- Greedy : 그 순간 가장 좋아보이는 선택을 한다. (Locally optimal)
그리디 알고리즘은 결정을 해야 할 때마다 그 순간에 가장 좋다고 생각되는 것을 해답으로 선택함으로써 최종적인 해답에 도달한다.
그 순간의 선택은 그 당시(local)에는 최적이다. 그러나 최적이라고 생각했던 해답들을 모아서 최종적인(global) 해답을 만들었다고 해서, 그 해답이 궁극적으로 최적이라는 보장이 없다.
따라서 그리디 알고리즘은 항상 최적의 해답을 주는지를 반드시 검증해야 한다.
설계 절차
1. Selection procedure (선정과정)
: 현재 상태에서 가장 좋으리라고 생각되는 (greedy criterion) 해답을 찾아서 해답 모음 (solution set)에 포함시킨다.
2. Feasibility check (적정성 점검)
: 새로 얻은 해답 모음이 적절한지를 결정한다.
3. Solution check (해답 점검)
: 새로 얻은 해답모음이 최적의 해인지를 결정한다.
Example
거스름돈 문제
- problem : 동전의 개수가 가장 최소가 되도록 거스름 돈을 주는 문제
- Greedy Algorithm
while (there are more coins and the instance is not solved) {
Grab the largest remaining coin; // 선정과정
if ( adding the coin makes the change exceed the amount owed){
reject the coin; // 적정성 점검
}
else
add the coin to the change;
if ( the total value of the change equals the amount owed )
the instance is solved; // 해답 점검
}
그리디 알고리즘으로 최적해가 보장되지 않는 예
- 이진 트리의 최적합 경로 찾기
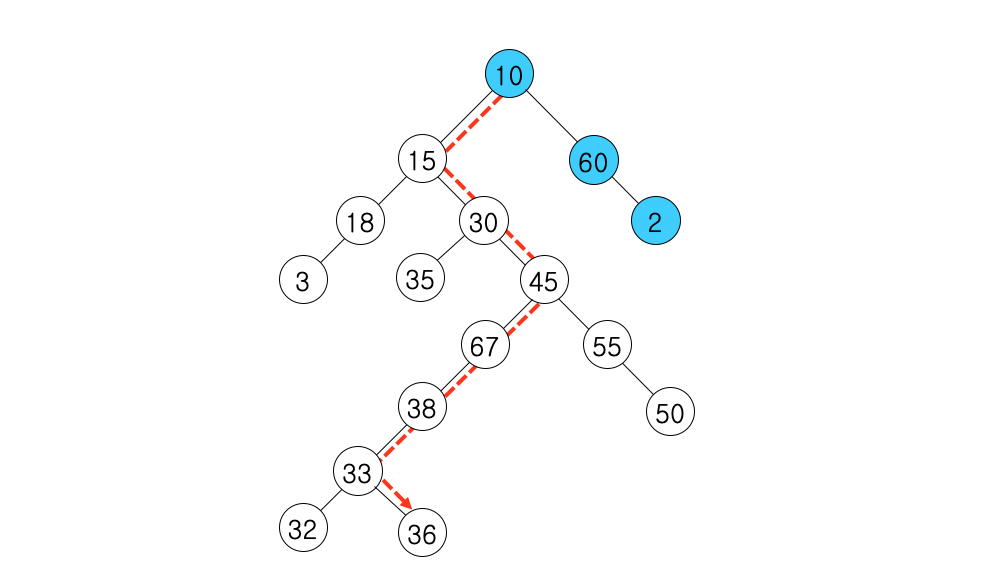
: 현재 상태에서의 최적만을 찾기 때문에, 비교하는 현재 노드의 자식노드를 고려하지 못함. 따라서 최종적으로 최적해가 아닐 가능성이 있다.
- 액면이 바로 아래 액면의 배수가 되지 않을 때의 거스름돈 문제
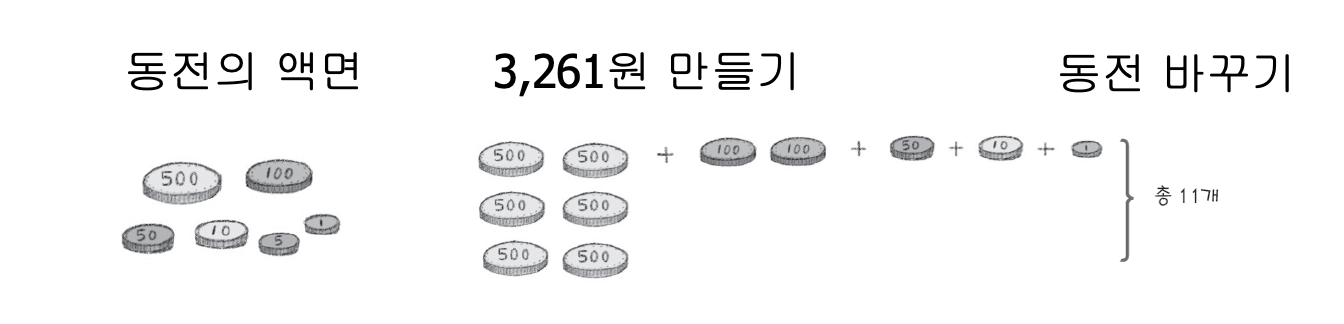
: 동전의 액면이
500원, 100원, 50원, 10원, 5원, 1원 으로 구성되어 있다.
- 500원 = 100원 * 5
- 100원 = 50원 * 2
- 50원 = 10원 * 5
- 10원 = 5원 * 2
- 5원 = 1원 * 5
와 같이 모든 액면이 바로 아래 액면의 배수가 된다면, 그리디 알고리즘으로 최적해가 보장된다.
하지만, 액면이 바로 아래 액면의 배수가 되지 않으면, 그리디 알고리즘으로 최적해가 보장되지 않게 된다.

: 동전의 액면이
500원, 400원, 100원, 75원, 50원 으로 구성되어 있다.
- 500원 = 400원 * 1.xxx
- 100원 = 75원 * 1.xxx
으로 액면이 바로 아래 액면의 배수가 되지 않으면, 그리디 알고리즘으로 최적해가 보장되지 않는다.
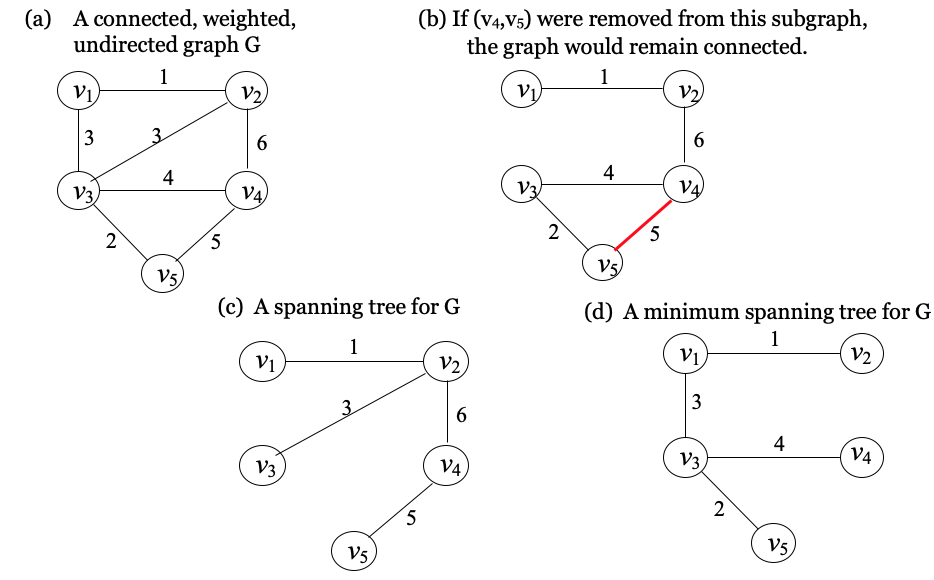
Spanning Tree
- 연결된, 비방향성 그래프에서 G에서 순환경로를 제거하면서 연결된 부분그래프가 되도록 이음선을 제거
- 따라서 신장트리는 G안에 있는 모든 정점을 다 포함하면서 트리가 되는 연결된 부분그래프
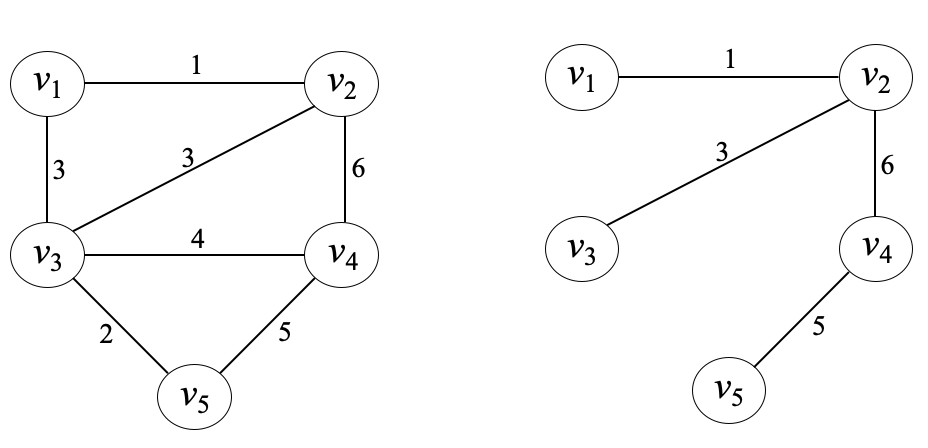
: 좌측은 연결된 가중치 비방향 그래프, 우측은 Spanning Tree의 예
Minimum Spanning Tree
-
최소의 가중치를 가진 부분그래프는 반드시 트리가 되어야 한다. 왜냐하면, 트리가 아니라면, 분명히 순환경로(Cycle)가 있을 것이고, 그렇게 되면 순환경로 상의 한 이음선을 제거하면 더 작은 비용의 신장트리가 되기 때문이다.
-
관찰 : 모든 신장트리가 최소비용 신장트리는 아니다.
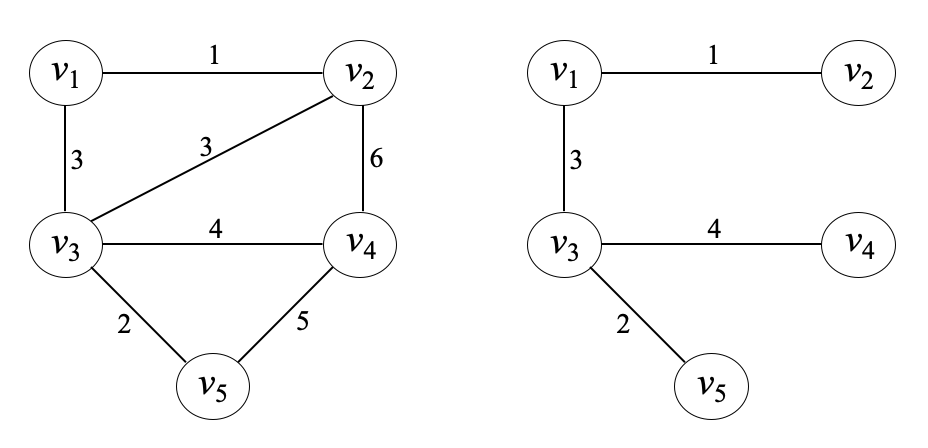
: 좌측은 연결되 가중치 비방향 그래프, 우측은 Minimum Spanning Tree의 예
과정
적용 예
- 도로 건설 : 도시들을 모드 연결하면서 도로의 길이가 최소가 되도록 하는 문제
- 통신 : 전화선의 길이가 최소가 되도록 전화 케이블 망을 구성하는 문제
- 배관 : 파이프의 총 길이가 최소가 되도록 연결하는 문제
그리디 접근법을 사용한 MST 구하기
-
problem : 비방향성 그래프 G=(V,E)가 주어졌을 때, F⊆E를 만족하면서, (V,F)가 G의 최소비용신장트리(MST)가 되는 F를 찾는 문제.
-
Algorithm
F = ∅
while (the instance is not solved) {
select an edge according to some locally # selection procedure
optimal consideration;
if (adding the edge to F dose not create a cycle)
add it; # feasibility procedure
if ( T = (V,F) is a spanning tree) # solution check
the instance is solved;
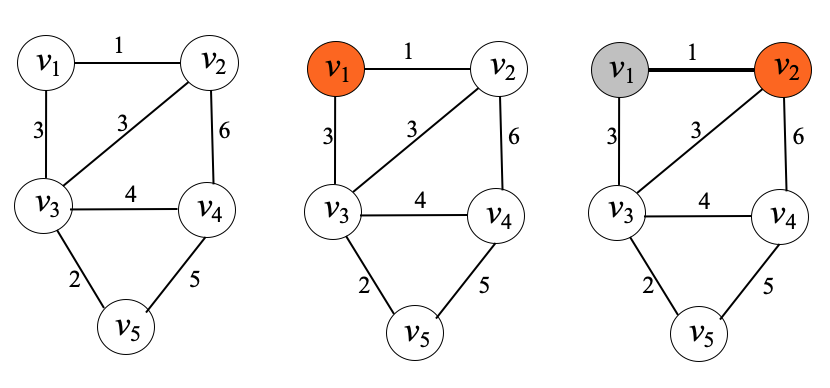
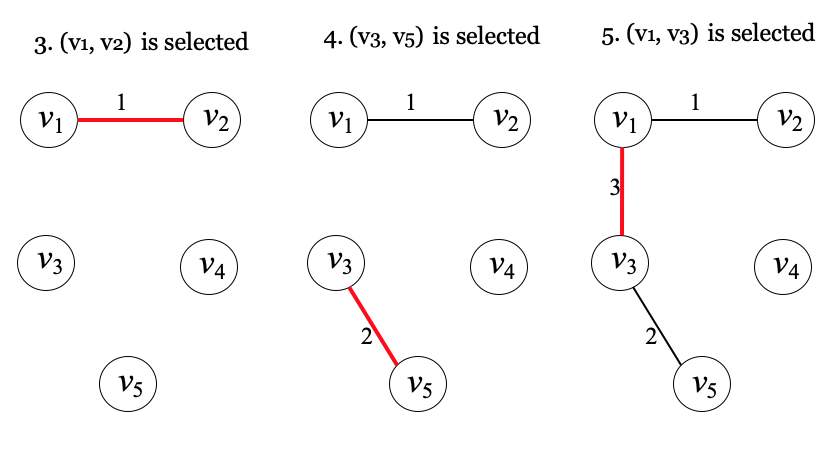
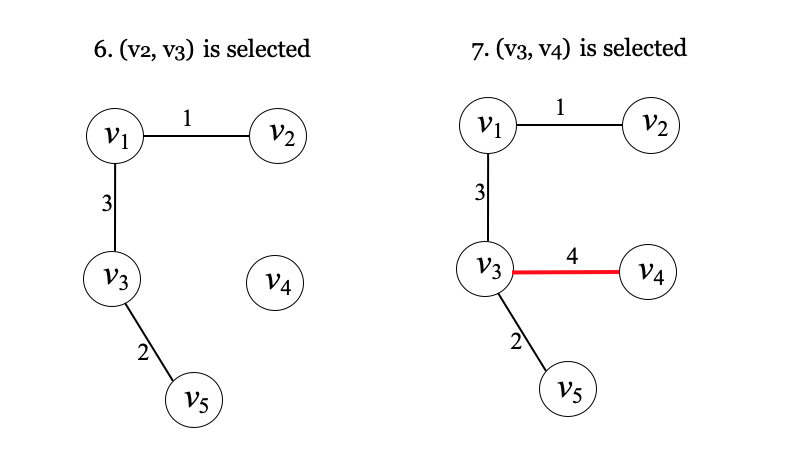
}Prim's Algorithm
- Algorithm
F = ∅; # initialize set of edges to empty
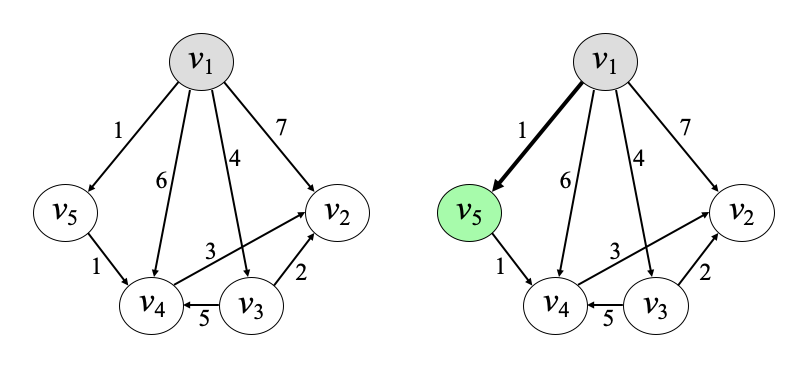
Y = {v1}; # initialize set of vertices to
# contain only the first one
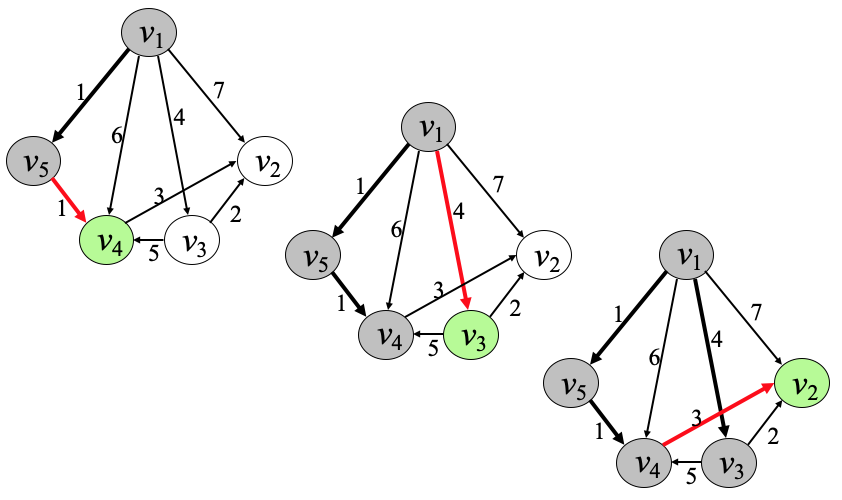
while ( the instance is not solved ) {
select a vertex in V-Y that is nearest to Y;
# selection procedure and
# feasibility check
add the vertex to Y;
add the edge to F;
if ( Y==V ) # solution check
the istance is solved;
}과정
예 1)
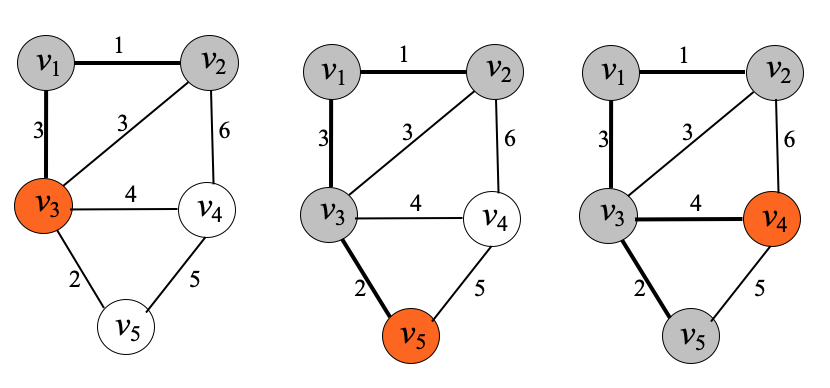
예 2)
Code
void prim ( int n, const number W[][], set_of_edges& F){
index i, vnear; number min; edge e;
index nearest[2..n]; number distance[2..n]
F=∅;
for ( i=2; i<=n; i++ ){ # 초기화
nearest[i] = 1; # vi에서 가장 가까운 정점을 v1으로 초기화
distance[i] = W[1][i];
}
repeat(n-1 times) { # n-1 개의 정점을 Y에 추가한다
min = "infinite";
for (i=2; i<=n; i++) # 각 정점에 대해서
if ( 0<=distance[i]<=min){ # distance[i]를 검사하여
min = distance[i]; # 가장 가까이 있는 vnear을
vnear = i; # 찾는다.
}
e = edge connecting vertices indexed by vnear and nearest[vnear];
add e to F;
distance[vnear] = -1; # 찾은 노드를 Y에 추가한다.
for ( i=2; i<=n; i++ )
if (W[i][vnear] < distance[i]){
distance[i] = W[i][vnear]; # Y에 없는 각 노드에 대해서
nearest[i] = vnear; # distance[i]를 갱신한다.
}
}
}Every-case Time Complexity Analysis
- 단위연산 : repeat-루프 안에 있는 두 개의 for-루프 내부에 있는 명령문
- 입력크기 : 마디의 개수, n
- 분석 : repeat-루프가 n-1번 반복되므로
T(n) = 2(n-1)(n-1) ∈ ⊝
최적여부의 검증 (Optimality Proof)
- Prim의 알고리즘이 찾아낸 신장트리가 최소비용(minimal)인지를 검증
- Definition : 비방향성 그래프 G=(V,E)가 주어지고, 만약 E의 부분집합 F에 MST가 되도록 이음선을 추가할 수 있으면, F는 유망하다(promising)라고 한다.
- Lemma : G=(V,E)는 연결되고, 가중치 포함 비방향성 그래프라고 하고, F는 E의 유망한 부분집합이라고 하고, Y는 F안에 있는 이음선 들에 의해서 연결이 되어 있는 정점의 집합이라고 하자.
이떄, Y에 있는 어떤 정점과 V-Y에 있는 어떤 정점을 잇는 이음선 중에서 가중치가 가장 작은 이음선을 e라고 하면, F∪{e}는 유망하다. - F가 유망하기 때문에 F⊆F'이면서 (V,F')가 최소비용신장트리가 되는 이음선의 집합 F'가 반드시 존재한다.
- 경우 1 : 만일 e∈F'라면, F∪{e}⊆F'가 되고, 따라서 F∪{e}도 유망하다.
- 경우 2 : 만일 e∉F'라면, (V,F')는 신장트리이기 때문에, F'∪{e}는 반드시 순환경로를 하나 포함하게 되고, e는 반드시 그 순환경로 가운데 한 이음선이 된다.
- 그러면 Y에 있는 한 정점에서 V-Y에 있는 한 정점을 연결하는 어떤 다른 이음선 e'∈F'가 그 순환경로 안에 반드시 존재하게 된다.
- 여기서 만약 F'∪{e}에서 e'를 제거하면, 그 순환경로는 없어지게 되며, 다시 신장트리가 된다. 그런데 e는 Y에 있는 한 정점에서 V-Y에 있는 한 정점을 연결하는 최소의 가중치(weight)를 가진 이음선이기 때문에, e의 가중치는 반드시 e'의 가중치보다 작거나 같아야 한다.(실제로 반드시 같게 된다.)
- 그러면 F'∪{e}-{e'}는 최소비용신장트리(MST)이다.
- 결론적으로 e'는 F안에 절대로 속할 수 없으므로 (F안에 있는 이음선들은 Y안에 있는 정점들 만을 연결함을 기억하라),
F∪{e}⊆F'∪{e}-{e'}가 되고, 따라서 F∪{e} 유망하다.
증명
- 정리 : Prim의 알고리즘은 항상 최소비용신장트리를 만들어 낸다.
- 증명 (수학적귀납법)
: 매번 반복이 수행된 후에 집합 F가 유망하다는 것을 보이면 된다.- 출발점 : 공집합은 당연히 유망하다.
- 귀납가정 : 어떤 주어진 반복이 이루어진 후, 그때까지 선정하였던 이음선의 집합인 F가 유망하다고 가정한다.
- 귀납절차 : 집합F∪{e}가 유망하다는 것을 보이면 된다. 여기서 e는 다음 단계의 반복 수행 시 전정된 이음선 이다.
그런데, 위의 보조정리 1에 의하여 F∪{e}은 유망하다고 할 수 있다. 왜냐하면 이음선 e는 Y에 있는 어떤 정점을 V-Y에 있는 어떤 정점으로 잇는 이음선 중에서 최소의 가중치를 가지고 있기 때문이다.
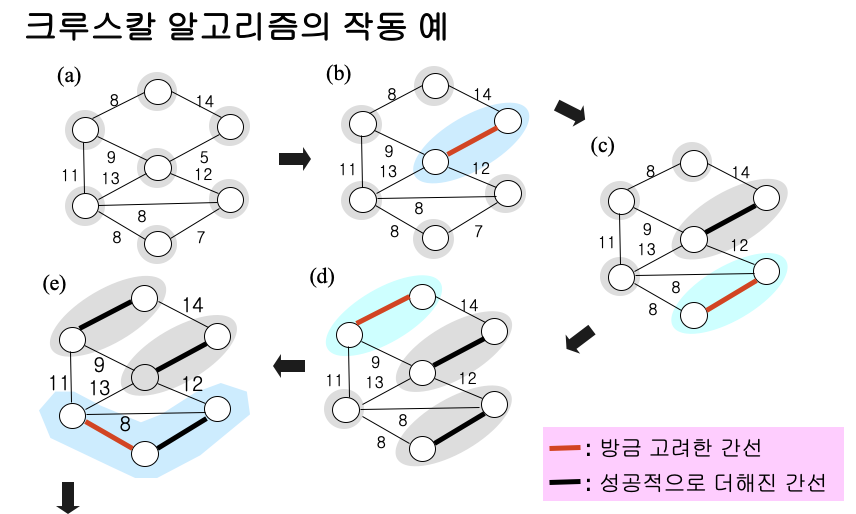
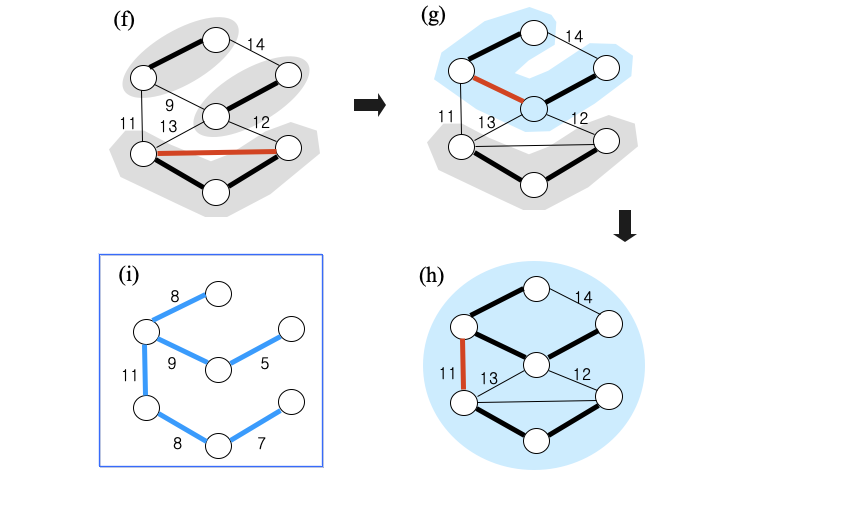
Kruskal's Algorithm
- Algorithm
F = ∅ # initialize set of edges
# to empty
create disjoint subsets of V, one for each
vertex and comtaining only that vertex;
sort the edges in E in nondecreasing order;
While ( the instance is not solved ) {
select next edge; # selection procedure
if ( the edge connects 2 vertices in disjoint subsets ) {
# feasibility check
merge the subsets;
add the edge to F;
}
if ( all the subsets are merged ) # solution check
the instnace is solved;
}과정
예 1)
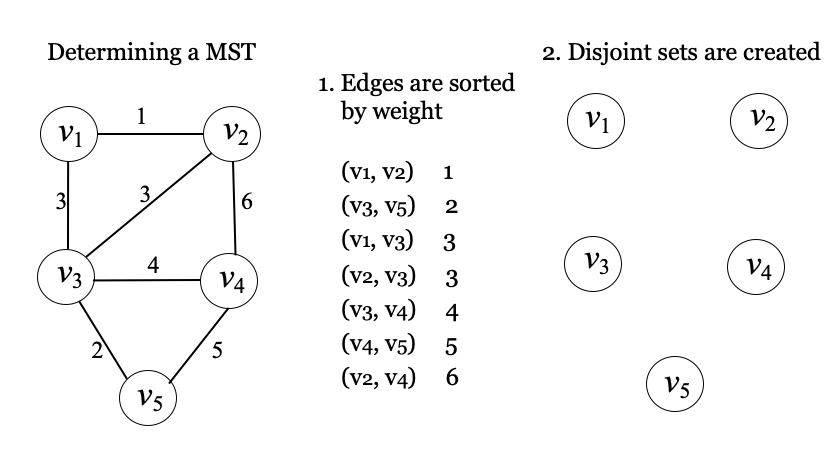
예 2)
Code
void kruskal (int n, int m. set_of_edges E, set_of_edges& F) {
index i,j;
set_pointer p, q;
edge e;
Sort the m edges in E by weight in nondecreasing order;
F = ∅;
initial(n); # n개의 서로소 부분집합을 초기화
# (하나의 부분집합에 1에서 n사이의 인덱스가 정확히 하나 포함됨)
While (number of edges in F is less than n-1) {
e = edges with least weight not yet considered;
i,j = indices of vertices connected by e;
p = find(i); # 인덱스 i가 포함된 집합의 포인터 p를 넘겨줌
q = find(j);
if ( !equal (p,q) { # p와 q가 같은 집합을 가리키면 true를 넘겨줌
merge(p,q); # 두 개의 집합을 가리키는 p와 q를 합병
add e to F;
}
}
}Worst-Case Time-Complexity Analysis
- 단위연산 : 비교문
- 입력크기 : 정점의 수 n과 이음선의 수 m
1. 이음선들을 정렬하는데 걸리는 시간 : ⊝(m lg m)- 반복문 안에서 걸리는 시간 : 루프를 m번 수행한다. 서로소인 집합 자료구조 (disjoint set data structure)를 사용하여 구현하고, find, equal, merge 같은 동작을 호출하는 횟수가 상수이면, m개의 이음선 반복에 대한 시간복잡도는 ⊝(m lg m)이다.
- n개의 서로소인 집합(disjoint set)을 초기화하는데 걸리는 시간 : ⊝(n)
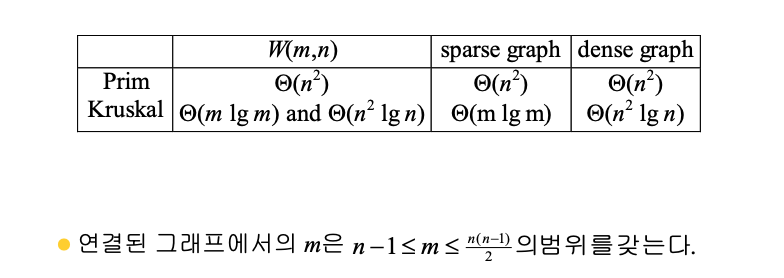
- 그런데 여기서 m>=n-1이기 때문에, 위의 1과 2는 3을 지배하게 되므로, W(m,n)=⊝(m lg m)가 된다.
- 그러나, 최악의 경우에는 모든 정점이 다른 모든 정점과 연결이 될 수 있기 때문에, 가 된다. 그러므로, 최악의 경우의 시간복잡도는
- 최적여부의 검증 (Optimality Proof)
- Prim의 알고리즘의 경우와 비슷함.
두 알고리즘의 비교
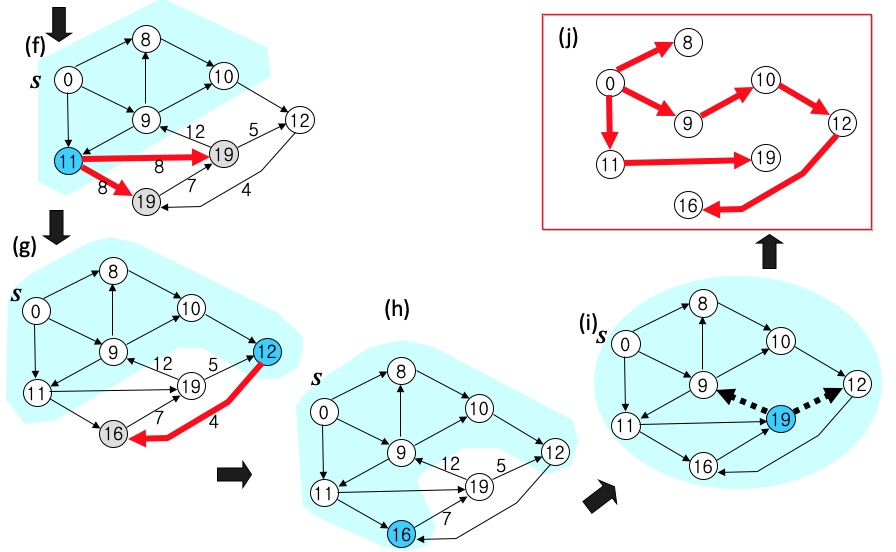
최단경로 - Dijkstra's Algorithm
- 가중치가 있는 방향성 그래프에서 한 특정 정점에서 다른 모든 정점으로 가는 최단경로 구하는 문제
- 시작점 v1
- 알고리즘
F = 0;
Y = {v1};
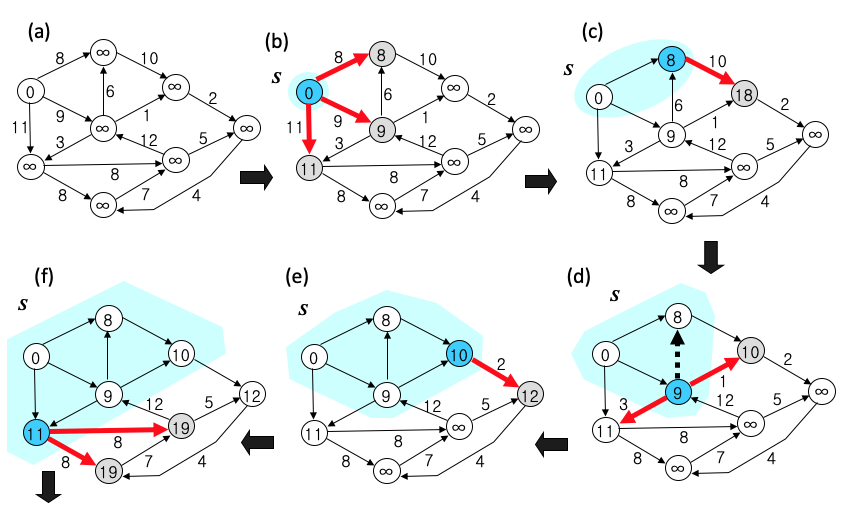
While ( the instance is not solved )
# selection procedure
select a vertex v from V-Y, that has a shortest path
# and feasibility check
from v1, using only vertices in Y as intermediate;
add the new vertex v to Y;
add the edge (on the shortest) that touches v to F;
# solution check
if( Y == V ) #
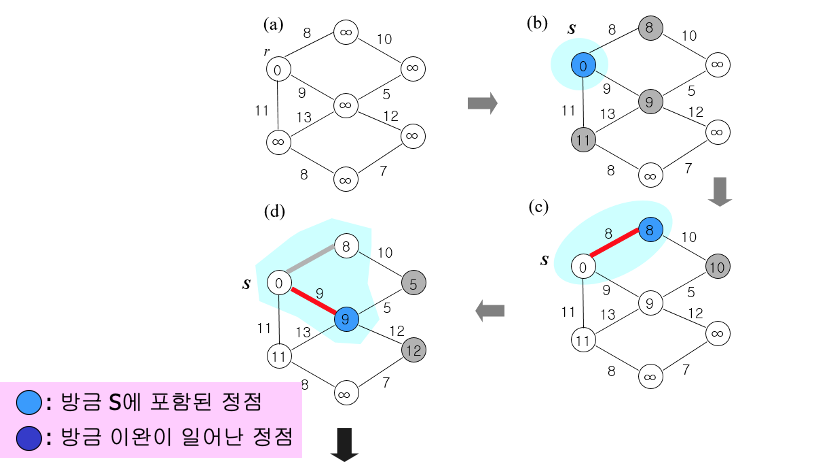
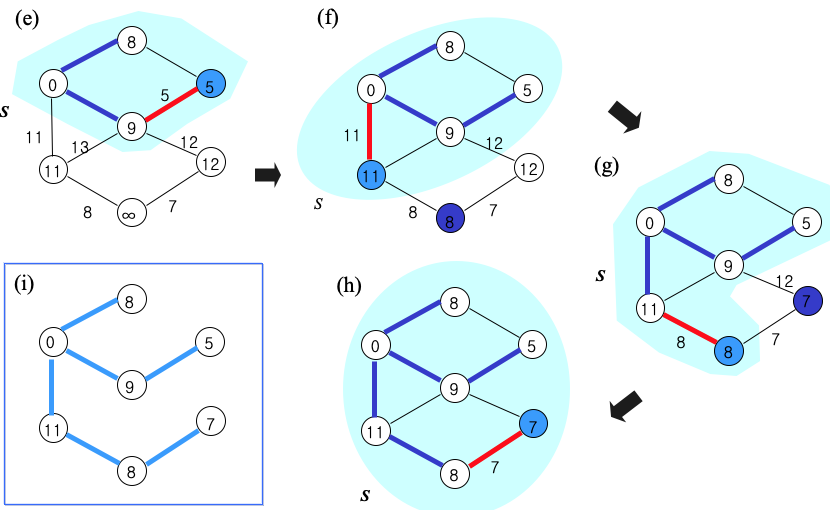
the instance is solved;과정
예 1)
예 2)
Code
void dijkstra ( int n, const number W[][], set_of_edges& F ) {
index i, vnear; edge e;
index touch[2..n]; number length[2..n];
F=∅;
for (i=2; i<=n; i++) { # For all vertices, initialize v1 to be the last
touch[i] = 1; # vertex on the current shortest path from v1,
length[i] = W[1][i]; # and initialize length of that path to be the
} # weight on the edge from v1
repeat(n-1 times) { # Add all n-1 vertices to Y.
min = "infinite";
for ( i=2; i<=n; i++ ) # Check each vertex for having shortest path.
if ( 0 <= length[i] <= min ){
min = length[i];
vnear = i;
}
e = edge from vertex indexed by touch[vnear]
to vertex indexed by vnear;
add e to F;
for ( i=2; i<=n; i++ )
if ( length[vnear] + W[vnear][i] < length[i]) {
length[i] = length[vnear] + W[vnear][i];
touch[i] = vnear; # For each vertex not in Y, update its shortest
} # path. Add vertex indexed by vnear to Y.
length[vnear] = -1;
}
}
분석
최적 여부의 검증 (Optimality Proof)
- Prim의 알고리즘의 경우와 비슷함.