📌URDF
-
Unified Robotics Description Format
-
스케치, 계산 시뮬레이션 등 로봇을 표현하기 위한 파일
-
multibody 시스템을 설계하기 위한 XML 형식을 사용하며, XML은 로봇 파라미터 정의에 유용하다.
-
확장자명 .urdf
-
ROS 사용
-
로봇을 시뮬레이션하기 위해 충돌 정보, 시각적인 모양, 물성(관성, 연결 등) 정보를 포함하고 있다.
📌XML
-
eXtensible Markup Language
-
데이터 교환, 저장이 용이해 다양한 데이터 표준화에 이용한다.
-
내용 표현을 위해 형식적인 마커가 있다.
-
사람이 읽기 쉽고, 문법적으로 분석/해석이 쉽다.
-
Markup: < >, & a
📌MATLAB를 활용한 3R Kinematic Model
기록해두면 좋은 것만 작성한다.
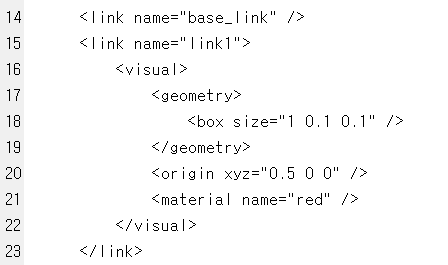
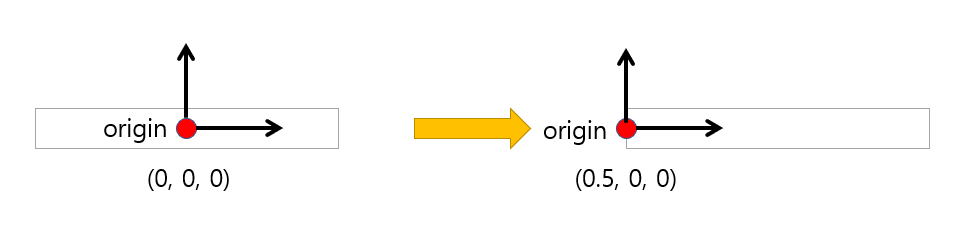
- origin의 default 값이 box size의 x의 중간 부분이므로, joint와 link의 끝을 맞추기 위해 link의 origin을 x축 방향으로 0.5만큼 이동시킨다.
🔎.urdf 파일 실행 결과
- joint 2 = pi/4
clear all; close all; clc;
r = importrobot('planar3b.urdf');
r.DataFormat='row';
show(r, [0 pi/4 pi/2]);
view(0,90);
- joint 2 = pi/3
clear all; close all; clc;
r = importrobot('planar3b.urdf');
r.DataFormat='row';
show(r, [0 pi/3 pi/2]);
view(0,90);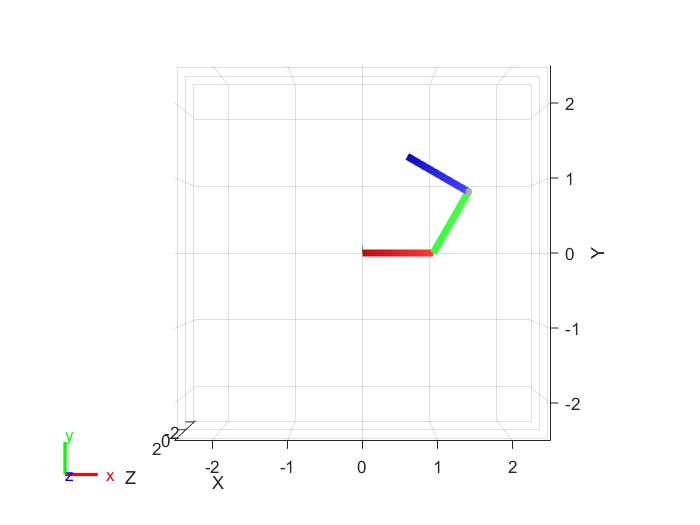

공부 기록