✏️Optimization
Optimization이란?
- loss function(L) value가 줄어 들었을 때, 어떤 optimum point에 이룰 것이라 기대; 찾고자 하는 parameter에 대해 L을 편미분한 값을 이용해 학습
- Gradient Descent : First-order(1차미분) iterative optimization algorithm for finding a local minimum of a differentiable function
Generalization(일반화)
- How well the learned model will behave on unseen data
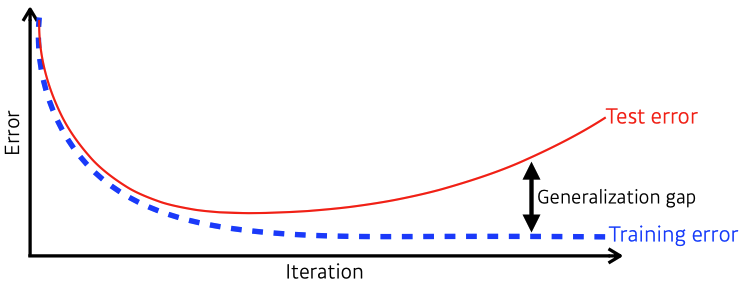
- 일반적으로 학습 시 training error는 iteration마다 줄어든다.
-> 우리가 원하는 최적값 도달 보장 X
-> 어느 시점부터 test error ↑ - generalization gap = generalization performance = 일반화 성능
-> 일반화 성능 좋다해서 모델 성능이 좋다고 보장 X
-> ex) train/test error가 둘다 크지만 gap 없을 경우
Underfitting vs. Overfitting
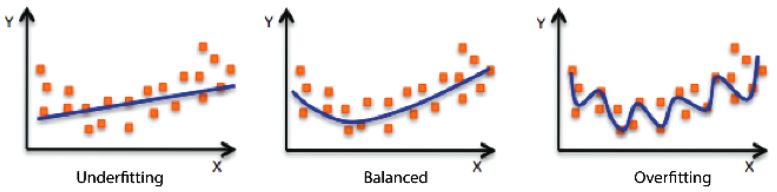
- Underfitting : simple network, lack of training, train data도 잘 못 맞춤
- Overfitting : train data prediction good, test data prediction bad
Cross-validation(K-fold validation)
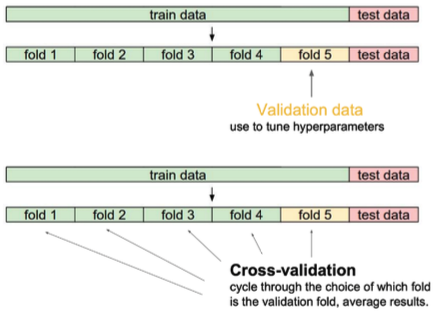
- is a model validation technique for assessing how the model will generalize to an independent (test) data set
- test data → 학습엔 절대 사용 X (cheating!!)
- validation data : over/underfitting 방지 테스트 용
-> 최적의 hyperparameters set을 찾은 후, 고정하고 마지막 학습엔 모든 data를 사용
Bias and Variance
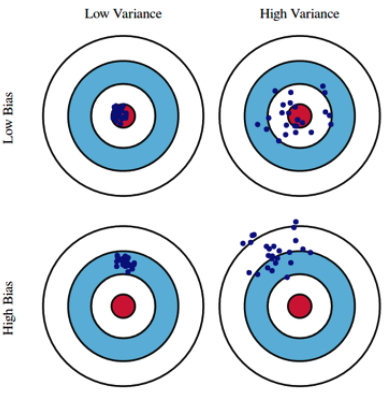
Bias and Variance Tradeoff
- Minimizing cost can be decomposed into three different parts: , variance, and noise
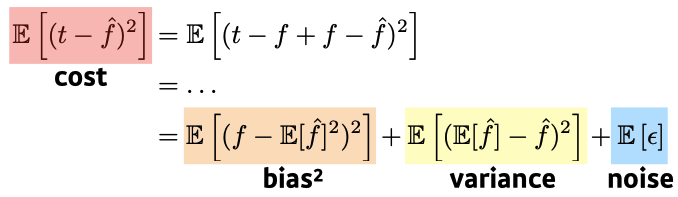
- cost를 minimize할 때 근본적으로 train datadp noise가 있다면, bias & variance를 둘 다 줄이기엔 어렵다
Bootstrapping (Ensemble)
- is any test or metric that uses random sampling with replacement
- 학습데이터를 subsampling해서 여러 개 집합을 만들고 그걸로 여러 모델 혹은 metric을 만들어 사용
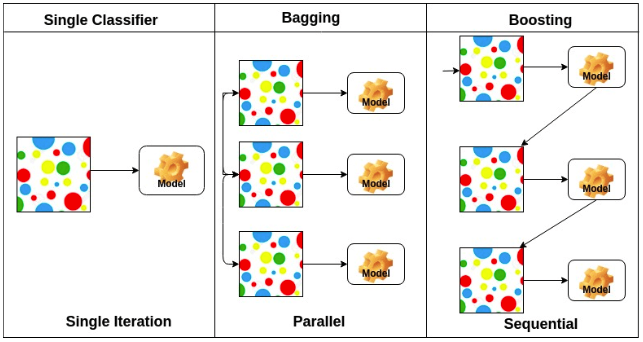
- Bagging(Bootstrapping aggregating)
- Multiple models are being trained with bootstrapping.
- ex) Base classifiers are fitted on random subset where individual predictions are aggregated
(votting or averaging) - Vanilla 학습보다 성능 ↑
- Boosting
- focus on those **specific training samples that are hard to classify
- combine weak learners in sequence where each learner learns from the mistakes of the previous weak learner.
Reference
✏️Practical Gradient Descent Methods
Gradient Descent Methods
Stochastic GD : Update with the gradinet computed from a single sample(batch-size)
Mini-batch GD : Update with the gradinet computed from a subset of data(batch-size)
Batch GD : Update with the gradinet computed from whole data(batch-size)
Batch-size Matters
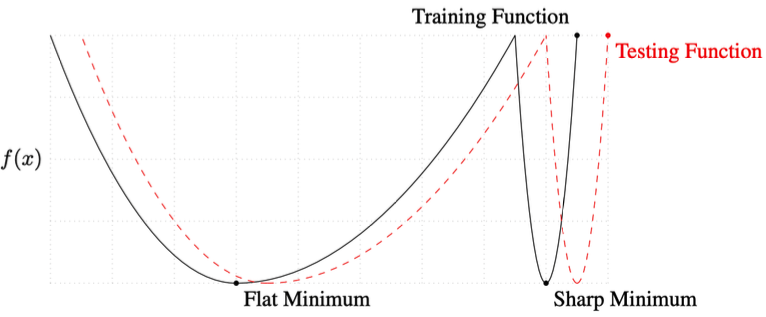
- a large batch tend to converge to sharp minimizers while small-batch methods consistently converge to flat minimizers; this is due to the inherent noise in the gradient estimation.
- flat minimizer의 generalization performance가 더 좋다.
-> This is why you should use MBGD(flat minimizer)
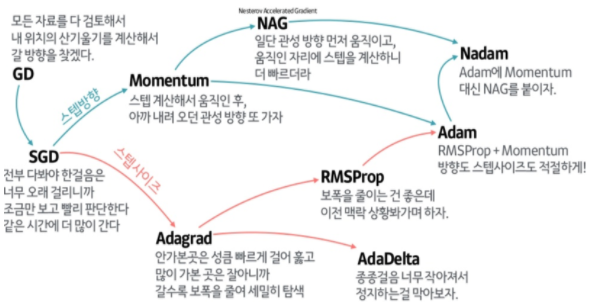
Gradient Descent
- : learning-rate, : gradient
- 문제점 : step-size(lr) 적절히 설정하기 어렵다
Momentum
→ momentum이 포함된 gradient로 업데이트
- : momentum, : accumulation
- intuition: 한번 gradient가 ➡방향으로 흐르면, 다음번 grad가 ⬅방향으로 다르게 흘러도, ➡방향 정보를 이어가자. → 전 grad 정보를 활용해보자.
Nesterov Accelerated Gradient(NAG)
→ 로 이동한 곳에서 gradient를 구한 값으로 을 구한다
- : Lookahead gradient
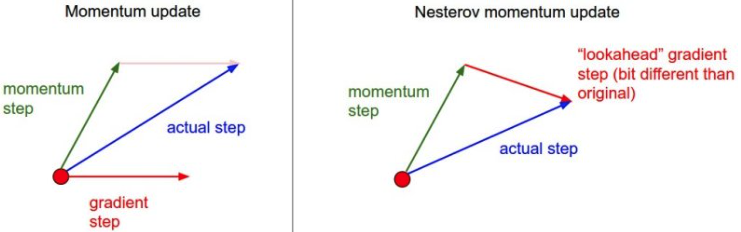
- NAG converge가 더 빠르다.
Adagrad
- adapts the learning rate, performing larger updates for infrequent and smaller updates for frequent parameters
- : for numerical stability (division by 0 처리)
- : sum of gradient squares (t까지의 gradient 변화 저장)
- 변화 적은 parameter 변화 ⬆, 변화 많은 parameter 변화 ⬇
- 문제점 : monotonically decreasing = 가 계속 커져서 무한대로 가면 update가 되지 않는다; 뒤로 가면 갈수록 학습 멈춤 현상이 생김
Adadelta
- extends Adagrad to reduce its monotonically decreasing the learning rate by restricting the accumulation window → Adagrad의 large 현상을 최대한 막겠다.
- : Exponential Moving Average(EMA) of gradient squares
- : Exponential Moving Average(EMA) of difference squares
- : Adagrad의 분자로 인한 monotonical decrease를 막는 수식
- time의 window-size만큼의 gradient 제곱의 변화를 보겠다.
-> 문제점 : # parameters가 많으면 window-size 무용지물 - no learning rate
- tuning 힘들어 잘 안쓴다.
RMSprop
- unpublished adaptive learning rate method proposed by Geoff Hinton in his lecture
- : EMA of gradient squares
- : stepsize
Adam(Adaptive Moment Estimation)
- leverages both past gradients and squared gradients
- hyperparameters : , , ,
- : Momentum
- : EMA of gradient squares
- : step-size
- : 전 time-step의 momentum, EMA of gradient squares 정보를 유지 비율 설정
- Adam effectively combines momentum with adaptive learning rate approach(RMSprop)
Reference
✏️Regularization
- Generalization '도구'
- 학습에 반대 되도록 규제를 건다. → 학습 방해가 목적
-> test(real) data prediction에도 이 방법론이 잘 동작할 수 있게 만들어 준다.(but 보장 불가)
-> validation dataset distribution ≠ test dataset distribution이기 때문
Early Stopping
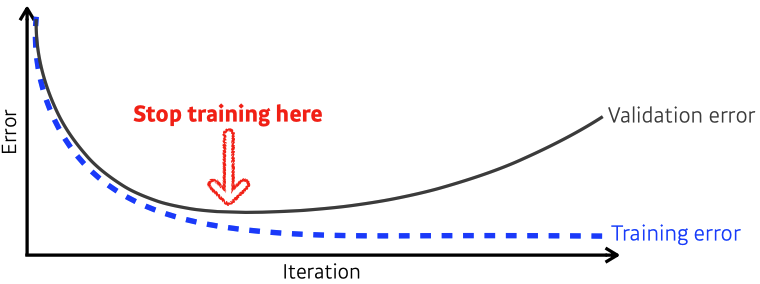
- we need additional validation data to do early stopping
-> validation data : train에 활용되지 않는 dataset - cost(error)가 커지는 시점에 stop한다.
Parameter Norm Penalty (Weight Decay)

-
adds smoothness to the function space → 부드러운 함수일수록 generalization performance가 올라갈 것이라 가정
-
NN parameters가 너무 커지지 않게 제약을 건다 → weight decay
-
L2 Regularization, L1 Regularization이 존재한다.
-
Reference
https://deepapple.tistory.com/6
https://huidea.tistory.com/154
Data Augmentation
- More data are always wecomed
Noise Robustness
- add random noises inputs or weights → data augmentation은 input data만 추가
- 왜 잘되는지는 아직까지 의문
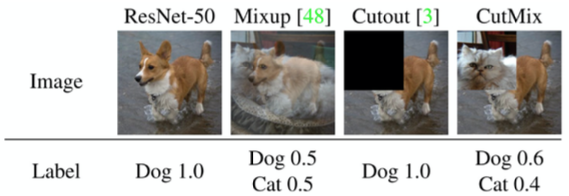
Label Smoothing
- ≈ Data Augmentation
- constructs augmented training exaples by mixing both input and output of two randomly selected training data
Dropout
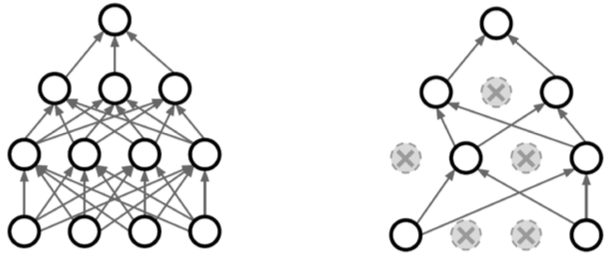
- NN train 시 (forward/backward propagation) dropout ratio만큼 각 layer의 neuron을 0으로 바꾸어준다.
- 각각의 neuron이 좀 더 robust한 feature를 잡을 수 있다; voting 효과 (증명 X)
- Reference
https://algopoolja.tistory.com/50
Batch Normalization
- compute the empirical mean and variance independently for each dimension (layers) and normalize
-> 각 layer의 statistic을 정규화
→ 평균을 빼고 표준편차로 나눠준다.
- different variances of normalizations
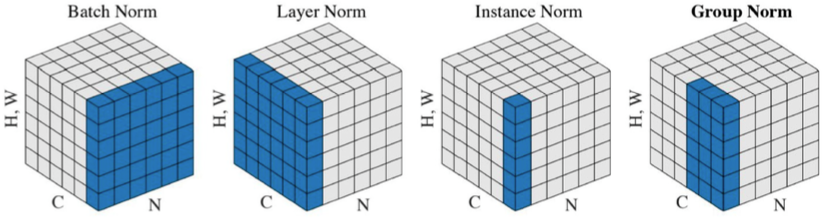
- Batch norm : layer 전체를 줄임
- Layer norm : 각 layer 정보를 줄임
- Instance norm : 데이터 별로 줄임
Image Reference
- https://docs.aws.amazon.com/machine-learning/latest/dg/model-fit-underfitting-vs-overfitting.html
- https://blog.quantinsti.com/cross-validation-machine-learning-trading-models/
- https://work.caltech.edu/telecourse
- https://www.datacamp.com/community/tutorials/adaboost-classifier-python
- https://onevision.tistory.com/entry/Optimizer-%EC%9D%98-%EC%A2%85%EB%A5%98%EC%99%80-%ED%8A%B9%EC%84%B1-Momentum-RMSProp-Adam
