✏️Convolutional Neural Networks(CNN)
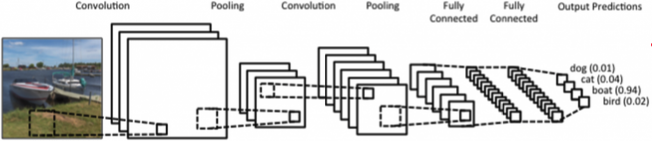
- CNN consists of convolution layer, pooling layer and fully connected layer(FC layer).
- Convolution and pooling layer : feature extraction(정보 추출)
- Fully connected layer : decision making(e.g. classification)
- 최근 FC layer를 없애거나 최소화 시키는 추세 (# parameters ⬆)
-> 학습 어렵고 generalization performance ⬇(학습 모델이 실제 data에서 얼마나 잘 동작하는지) - FC layer 대신 convolutional layer로 대체 (conv layer # parameters <<< dense layer # parameters)
-> convolution layer의 kernel이 모든 위치에 동일하게 적용되기 때문
(convolution operator = shared parameter)
Convolution
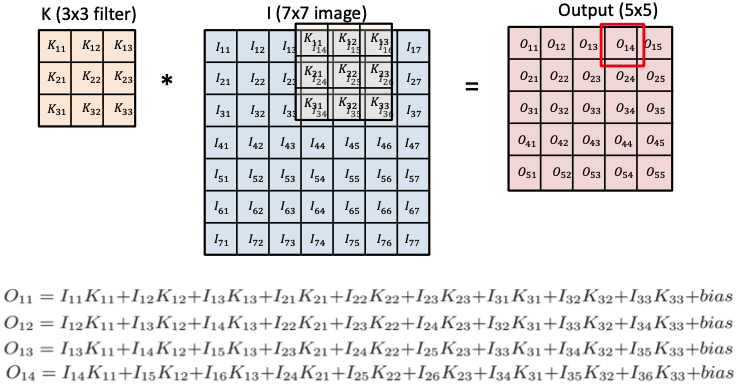
- filter = kernel
- receptive field(국부 수용영역): filter가 한 번에 보는 영역의 크기; 입력의 spatial dimension
RGB Image Convolution
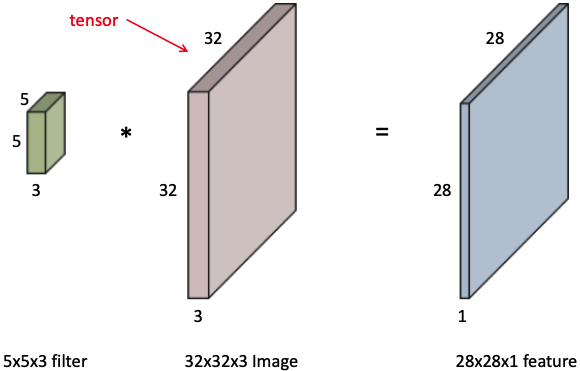
- input image channel size = filter(kernel) channel size
output width =
output height =
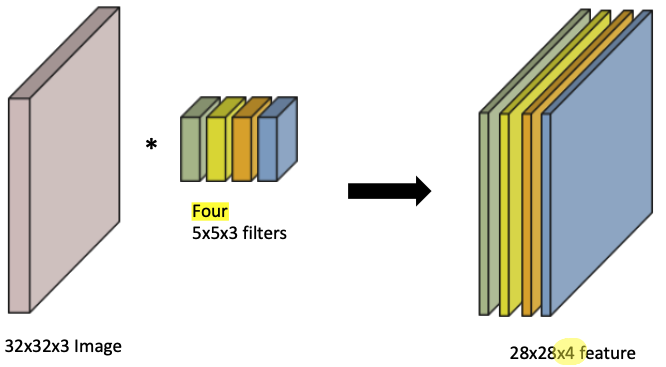
- convolutional feature map의 channel size = filter(kernel) 개수
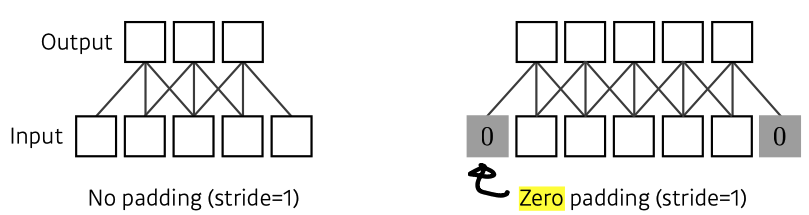
Padding
- boundary(edge) information을 keep하기 위해
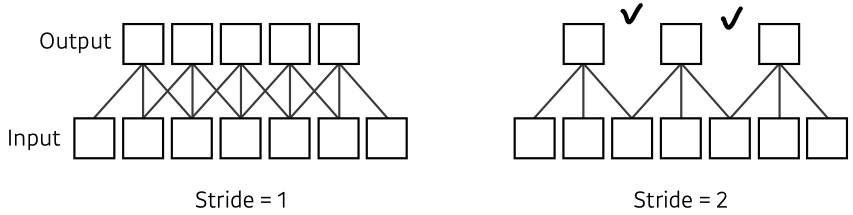
Stride
Convolution Arithmetic (# parameters 계산)
- padding과 stride는 parameter 계산과 무관하다.
- kernel width x kernel height x # input channel x # output channel + # output channel bias
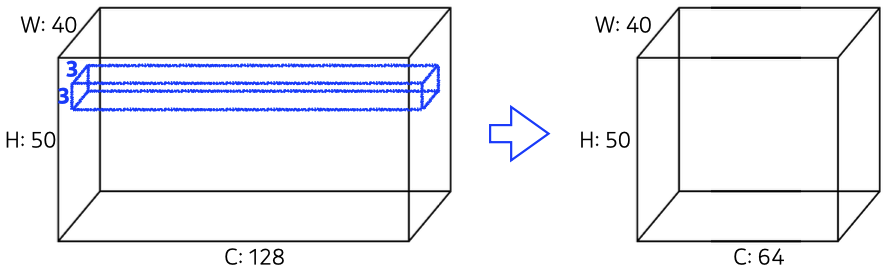
ex) # params = 3 x 3 x 128 x 64 + 64 = 73,792
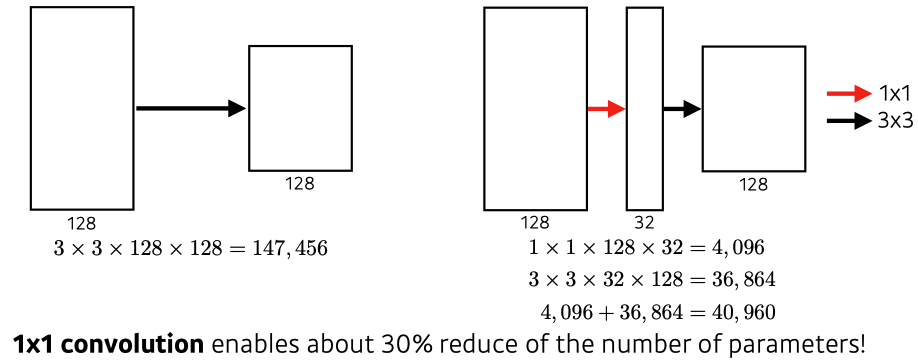
1 x 1 Convolution (중요)
- image의 한 pixel만 보는 것; spatial dimension은 유지, channel만 줄임.
- Dimension(channel) reduction
- to reduce the # parameters while increasing the depth (e.g. bottleneck architecture)
-> FC layer는 # parameters가 많기 때문에, conv layer를 깊게 쌓고 # parameters를 줄이는 것이 좋다.
✏️CNN history
- 핵심 : network depth는 점점 깊어지지만, # parameters가 줄어들며 performance가 올라가는 모델들이 나왔다.
-> 하지만 최근 GPT-3나 dall-e처럼 데이터가 많으면 # parameters가 많아지는 건 당연한듯
ILSVRC
- ImageNet Large-Scale Visual Recognition Challenge
- Classification / Detection / Localization / Segmentation
- 1,000 different categories (classification task)
- Over 1 million images
- Training set : 456,567 images

- 2015년 이후로는 error rate 계산의 의미가 없음.
AlexNet
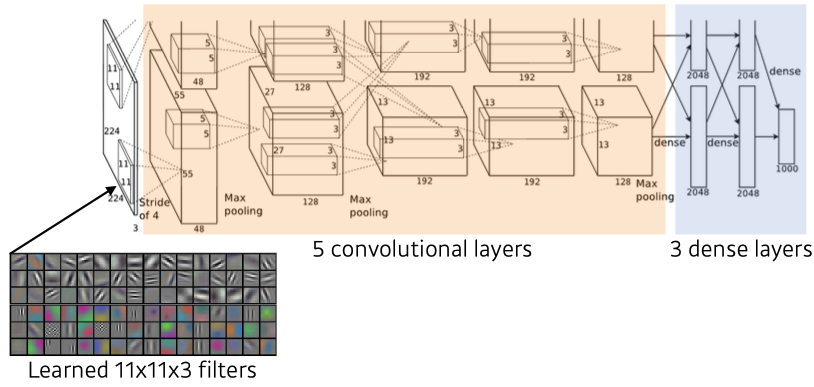
- 최초로 Deep Learning Architecture를 이용하여 ILSVRC에서 수상.
- ReLU activation
-> preserves good properties of linear models
-> easy to optimize with gradient descent
-> overcome the vanishing gradient problem
-> good generalization - 2 GPUs implementation
- Local response normalization, Overlapping pooling
- Data augmentation
- Dropout
VGGNet
- 3x3 Convolution을 이용하여 Receptive field는 유지하면서 더 깊은 네트워크를 구성.
- increasing depth with 3x3 convolution filters (with stride 1)
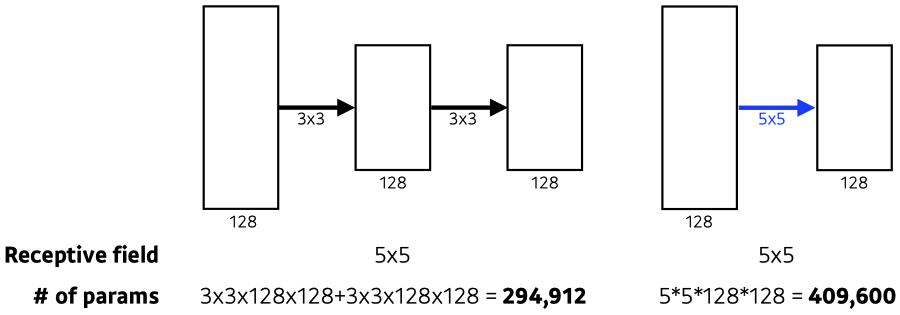
-> # parameters ⬇, 마지막 convolutional feature map이 보는 receptive field는 같다! - 1x1 convolution for fully connected layers
- Dropout(p=0.5)
GoogLeNet
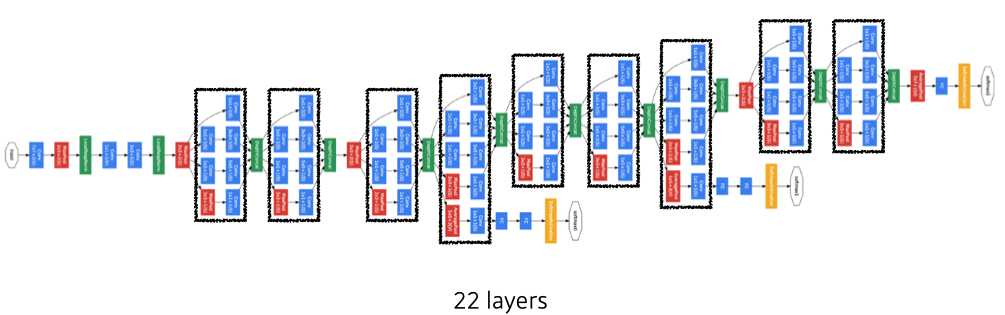
- combined network-in-network(NiN) with inception blocks
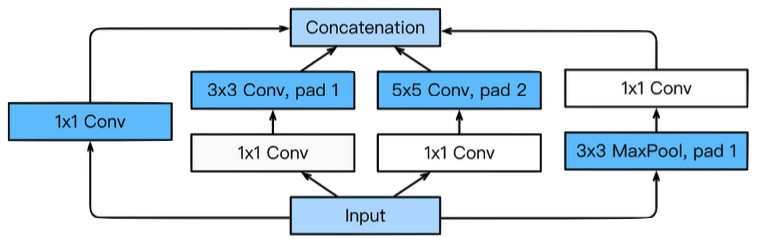
- Inception blocks
- 하나의 입력이 여러 개로 퍼졌다가 하나로 concat.
- reduce the number of parameter → 1x1 convolution as channel-wise dimension reduction
- Benefit of 1x1 convolution
ResNet
- h(x) = f(x) + x의 구조
- performance increases while parameter size decreases.
- residual connection(= skip connection = identity map)이라는 구조를 제안.
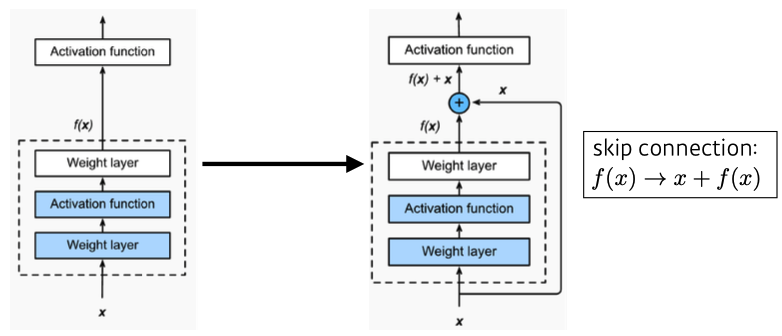
- conv layer가 학습하는 quantity는 'residual(잔차,차이)'만 학습한다.
- 깊게 쌓아도 학습 가능!
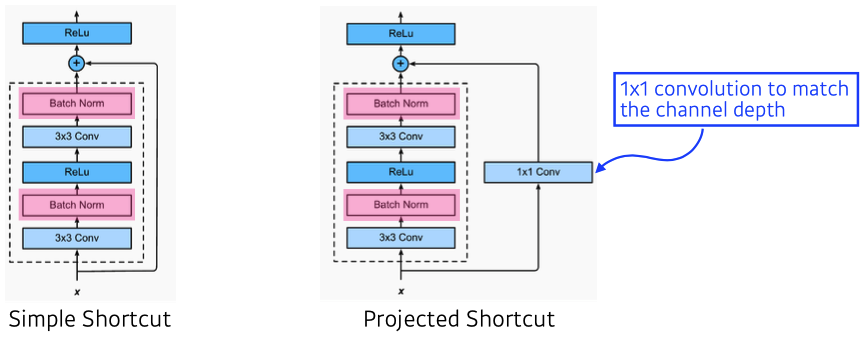
- 일반적으로 simple shortcut을 씀
- ReLU와 BN 순서에 대해 논란이 많다. (논문에서는 위 처럼 구조)
- Bottleneck architecture
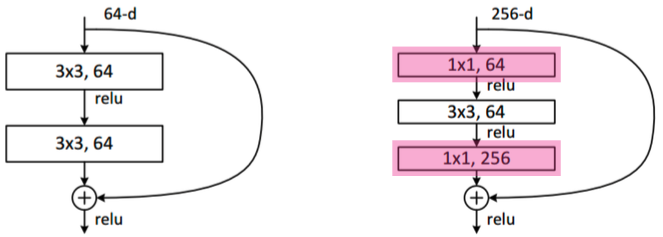
- GoogLeNet의 inception blocks와 유사
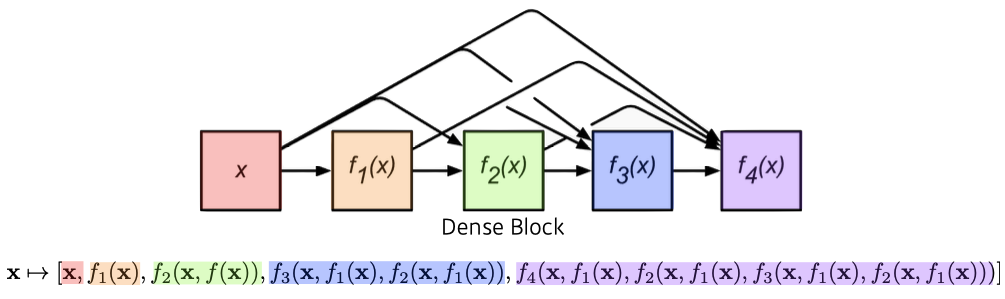
DenseNet
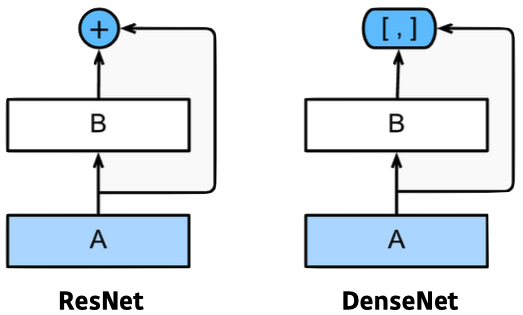
- ResNet과 비슷한 아이디어지만 Addition이 아닌 Concatenation을 적용한 CNN
- 정보가 섞이기 때문
- But, channel이 기하급수적으로 커짐 → 뒤로 갈수록 앞 값을 다 concat하기 때문 (# parameters ⬆)
Summary
- VGG : repeated 3x3 blocks → # parameters ⬇, receptive field 유지
- GoogLeNet : 1x1 convolution → channel-wise dimension reduction
- ResNet : skip-connection → network depth ⬆
- DenseNet : concatenation → performance ⬆ than addition(ResNet)
✏️Computer Vision Applications
Semantic Segmentation (= Dense Classification)
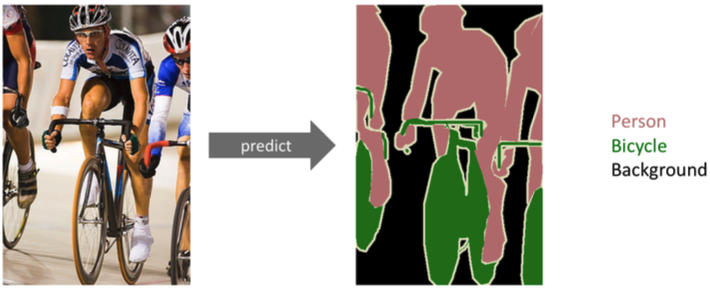
- 각 이미지의 pixel마다 분류 (자율주행, 운전보조장치 쪽에 많이 쓰임)
Fully Convolutional Network
- Vanilla CNN
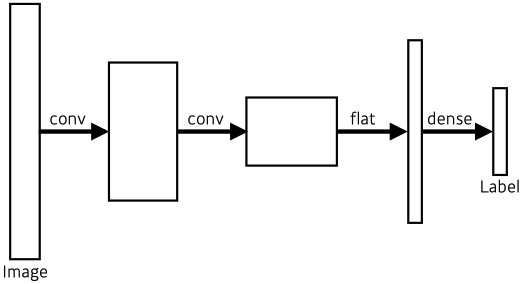
- Fully Convolutional Network
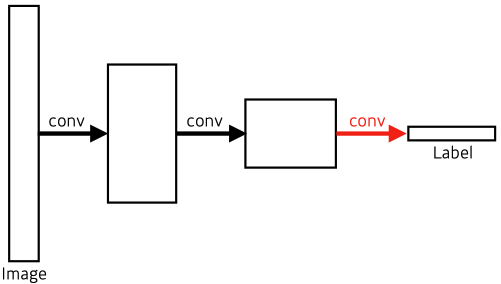
- No dense layer → convolutionalization
- # parameters are same between dense layer and FC network
Convolutionalization
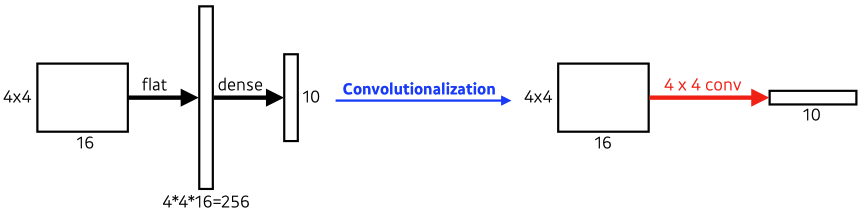
- # parameters (left) : 4 x 4 x 16 x 10 = 2560
- # parameters (right) : 4 x 4 x 16 x 10 = 2560
Why should you use Fully Convolutional Network?
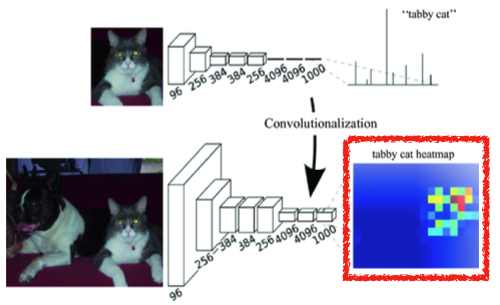
1. Transforming fully connected layers into convolution layers enables a classification net to output a heat map
-> spatial information(위치 정보)를 유지
2. FC(Dense) layer는 fixed input size를 갖지만, FC network는 convolution 연산이 갖는 shared parameter 성질로 input spatial dimensions에 independent하다.
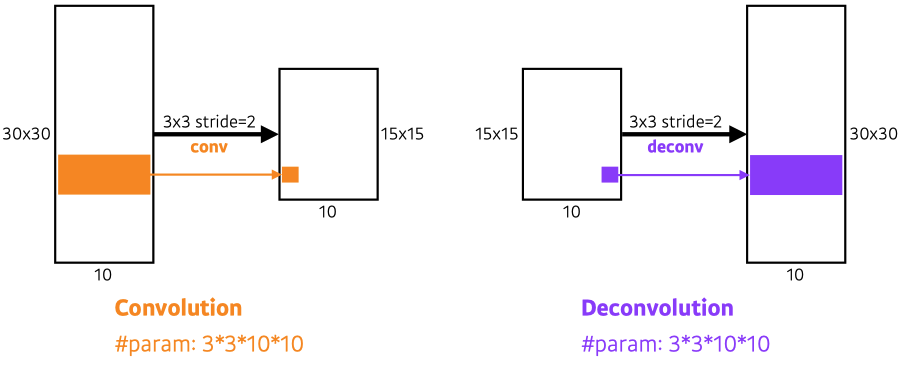
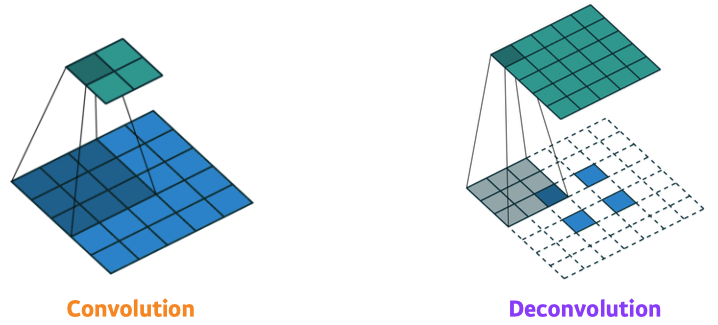
Upsampling
- While FCN can run with input of any size(spatial dimensions) the output dimensions are typically reduced by subsampling. ex) 100x100 → 10x10
- we need a way to connect the coarse output to the dense pixels. →upsampling 기법
- Deconvolution(conv transpose)
- backward convolution (convolution 역연산)
- 완전 복원은 불가능 → 10 = 3+7 = 2+8 = ...
Reference
- https://hugrypiggykim.com/2019/09/29/upsampling-unpooling-deconvolution-transposed-convolution/
- https://kuklife.tistory.com/117
- https://m.blog.naver.com/laonple/220958109081
Detection
- semantic segmentation : per pixel ↔ detection : bounding box (patch)
R-CNN
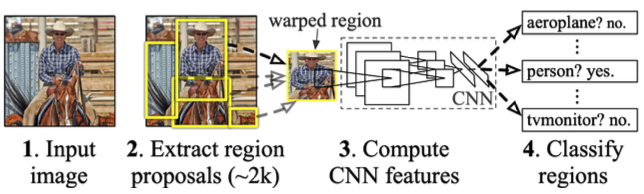
- takes an input image
- extracts around 2,000 region proposals (etracts patches randomly) → Selective search
- compute features for each proposal using AlexNet
- classfies with linear SVMs
- 굉장히 brute force 스럽고 오래 걸린다.
SPPNet
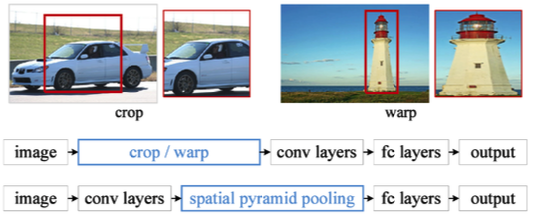
- In R-CNN, CNN must run more than 2,000 times → 각각의 patch마다 CNN 돌려야 함
- In SPPNet, CNN runs once
- input image를 CNN에 넣어 feature map을 뽑고, 그 feature map에서 bounding box마다 값을 뽑아 낸다.
Fast R-CNN
- takes an input and a set of bounding boxes → using selective search
- gnerated convolutional feature map → SPPNet과 동일
- For each region, get a fixed length feature from ROI(Region of Interest) pooling
- Two outputs : class and bounding-box regressor
- SPPNet과 거의 유사하지만 NN으로 다 처리
Faster R-CNN
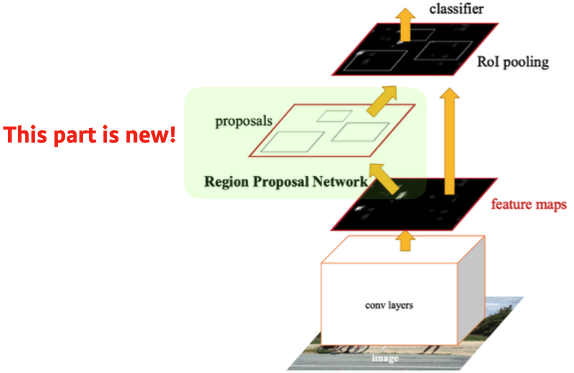
- Fast R-CNN + Region Proposal Network
- selective search는 임의로 bounding-box를 뽑지만, bounding-box candidate 설정 법도 NN으로 학습하자
- Region Proposal Network
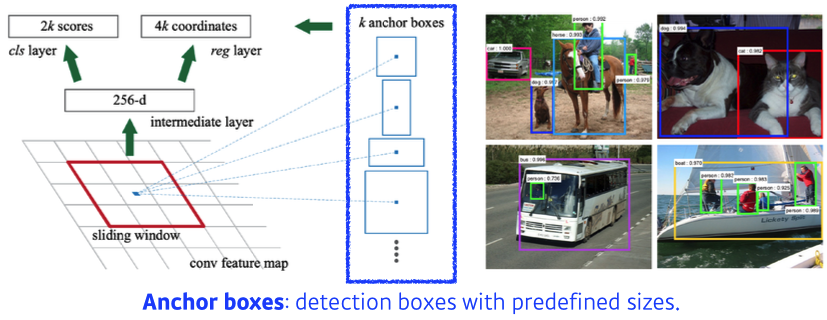
- Region Proposal : 특정 영역(patch)이 bounding-box로서 의미가 있을지(target이 있을지) 찾아준다.
- Anchor boxes : detection boxes with predefined sizes(template); 미리 정한 bounding-box 크기
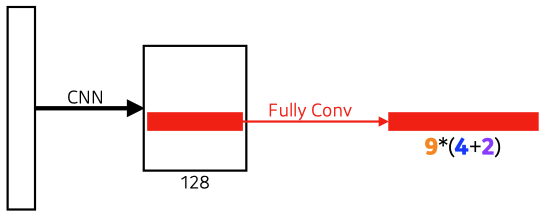
9 : Three different region sizes (128, 256, 512) with three different ratios (1:1, 1:2, 2:1)
→3 x 3 = 9, anchor boxes
4 : four bounding box regression parameters
2 : box classification (whether to use it or not) → yes or no
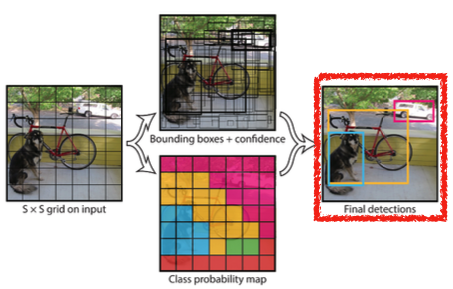
YOLO (You Only Look Once)
-
YOLO(v1) is an extremely fast object detection algorithm
-
⭐️ It simultaneously predicts multiple bounding boxes and class probabilities
- bounding box를 따로 뽑아서 분류하지 않고, 한번에 진행
-
No explicit bounding box sampling (compared with Faster R-CNN)
- Region Proposal Network에서 나온 bounding box sub-tensor를 분류하지 않는다.
-
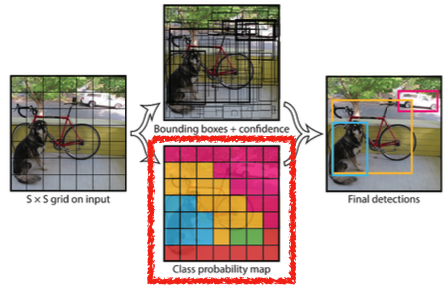
Given an image, YOLO divides it into SxS grid.
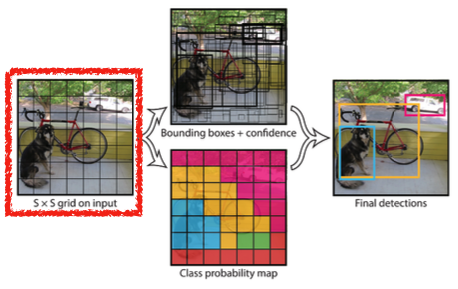
- if the center of an object falls into the grid cell, that grid cell is responsible for detection.
- detection target center가 해당 grid 안에 있으면 그 grid cell이 해당 물체에 대한 bounding box, class를 예측
-
Each cell predicts B bounding boxes (B=5)
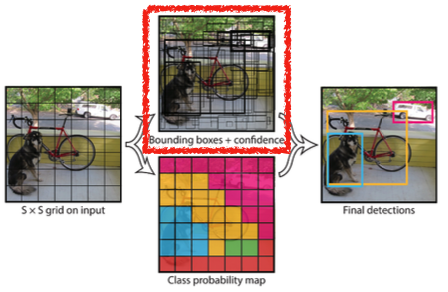
- Each bounding box predicts
-> box refinement (x, y, w, h)
-> confidence (of objectness) → box probability
- Each bounding box predicts
-
Each cell predicts C class probabilities
-
In total, it becomes a tensor with S x S x (B * 5 + C) size
- S x S : Number of cells of the grid
- B * 5 : B bounding boxes with offsets (x, y, w, h) and confidence
-> B x [x, y, w, h, c]
- C : Number of classes