 Coursera 자율주행 전문화 코스 - Introduction to Self-Driving Car 강의를 듣고 있다. 한국 사람들이 많이 듣지 않는지 한국어 번역이 없어서 내가 Coursera GTC(Global Translator Community) 등록해서 번역하면서 동시에 공부하고 있다. 계속 추가하고 있는데, 이게 100% 번역 되어야 제공되는걸까 아직 공식에서는 제공이 안된다.
Coursera 자율주행 전문화 코스 - Introduction to Self-Driving Car 강의를 듣고 있다. 한국 사람들이 많이 듣지 않는지 한국어 번역이 없어서 내가 Coursera GTC(Global Translator Community) 등록해서 번역하면서 동시에 공부하고 있다. 계속 추가하고 있는데, 이게 100% 번역 되어야 제공되는걸까 아직 공식에서는 제공이 안된다. 혹시 제 번역으로 공부하고 싶은 한국어 사용자가 있으면 GTC 등록하셔서 보십셔. 도메인 지식이 있어서 구글 번역기보다 낫습니당 진짜임
걍 호로록 영어로 듣는 것보다 더 깊게 이해하고 있는 것 같다... 그럴만도 한 게
1) 영어로 호로록 듣기
2) 전문 번역하면서 듣기
3) 번역한 거 GTC 프로그램에 옮겨 적음
4) 번역 완료한 거 확인하느라 한 번 더 들음
5) velog 에 적으려고 강의 한 번 더 들으면서 정리함
최소 5번은 듣기 때문이다...
각설하고 강의 내용 정리한 거 옮기고 떠난다

아래 내용은 Coursera와 University of TORONTO 에서 제공하는 < Introduction to Self-Driving Car > 강의 내용을 정리한 글입니다.
Lesson1. Sensors and Computing
-
센서
정의 : 환경의 일부 속성 또는 시간에 지남에 따라 변화하는 속성을 감지하는 장치
분류 : Exteroceptive(외부수용성) vs Proprioceptive(고유수용성)
-
Exteroceptive Sensor
1) Camera : 수동 광채집 센서. 풍부하고 상세한 장면 데이터
해상도, FOV, Dynamic Range, 초점 거리, Depth of Field, 프레임 레이트 등 특성이 있음
Dynamic Range 관련 내용 자세히 나와있는 블로그 : https://blog.envision.co.kr/29두 카메라를 캘리브레이션 한 스테레오 카메라도 있음
2) LiDAR : Light Detection And Ranging 의 약자
반사된 광량, 시간을 측정하여 강도와 거리를 추정할 수 있음. 3D point cloud map 을 반환한다. 밤에도 사용할 수 있지만, 비 눈 등 물체 표면의 굴절률이 달라지면 객체 인식 성능이 떨어진다. 채널수, 초당 포인트 수, 회전 속도, 시야각도 등이 중요하다. 최근 회전 광원 소자가 없는 HD-Solid LiDAR 연구가 진행중이다.
3) RADAR : Radio Detection and Ranging
검출 범위, 시야각, 위치 및 속도 측정 정확도에 따라 다름. 시야각이 넓지만 범위가 짧거나 시야각이 좁지만 범위가 긴 것으로 나뉨
4) Sonar/Ultra Sonar : 범위 측정 단거리 센서
측정 최대 범위, 탐지각, 가격
-
Proprioceptive 센서
1) GPS : 자기차량 위치, 속도, 방향 측정
2) IMU : 각속도, 선가속도, 3D 차량 방향 추정
-> 칼만 필터를 이용해서 GPS&IMU 를 퓨전할 수 있음.
3) Wheel Odometry : 바퀴 회전 속도, 방향 변화
-
-
컴퓨터 요소
a. Nvidia Drive PX : GPU 여러개 들어있음
b. Intel&Mobileye EyeQ : FPGA 있음 : 이미지 처리, 신경망 추론 등 분산 가능한 컴퓨팅 테스크 가속화 가능
c. Custom ASIC 등 -
synchronize : GPS 시계로 동일한 타임스탬프를 찍음
Lesson2. HW configuration Design
비상정지 급정거 감속도 : 5m/s^2
정상 조건 감속도 : 2m/s^2
제동거리 d = v^2/2a
- 고속도로 시나리오
- 특징 : 빠른 주변 차량, 교통량 많음, 차선 많음, 이동방향 모두 같음
- 비상정지 : 빠른 속도로 움직이기 때문에 전방 110m 인지 필요(150~200m 가 목표 감지거리)
- 앞 차량 추종 : 상대 위치, 상대 속도, 전방 차량 감속도와 자기 차량 반응 속도를 기준으로 안전거리 유지
- 차선변경 : 옆옆차선 인지까지 필요(차량기준 반지름 7.5m)
- 도심주행 시나리오
- 특징 : 적당한 속도, 교통량 보통, 모든 방향에서 차량이 움직임, 보행자에 의한 복잡성
- 비상정지, 앞 차량 추종, 차선변경은 같음
- 주차된 차를 지나가기(추월) : 주차된 차 감지(넓은 시야각&단거리), 전방에서 접근하는 차량 감지(좁은 시야각&장거리), 횡방향으로 넓은 시야각&중거리 센서 필요
- 교차로 좌회전 : 다가오는 차량, 보행자, 좌우회전 등 모든 종류 움직임 감지 → 360도 중장거리 센서 필요
- 회전 교차로 : 차량 속도가 느리지만 이동 방향으로 인해 넓은 시야각의 중단거리 센서 필요
→ 상황 ODD에 따라 센서를 구성해야 함.
Lesson3. Software Architecture
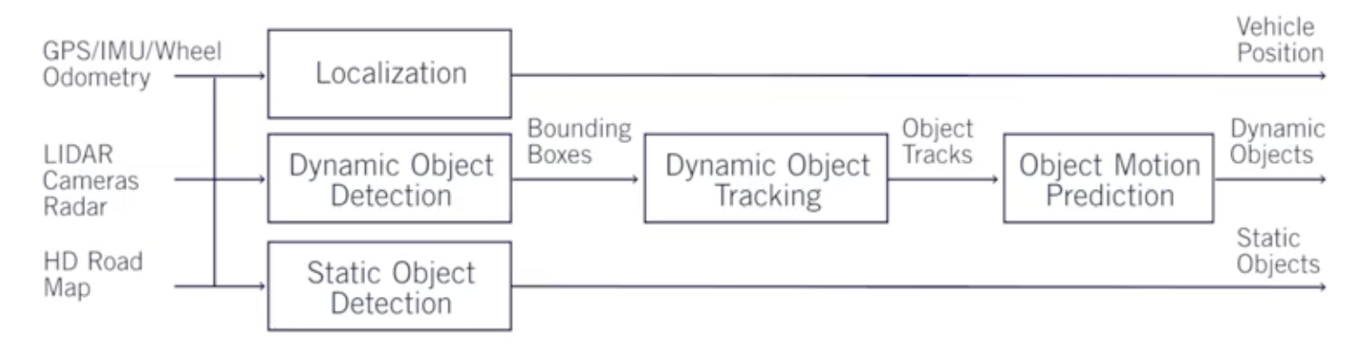
- 환경 인지 : 차량 위치 추정, 환경 요소 분류 및 위치 추정
- 측위 모듈 : GPS, IMU, 휠 오도메트리, LiDAR, 카메라 → 차량 위치 추정
- 동적 객체 감지 : LIDAR, CAMERA → 바운딩박스 → 추적 모듈이 동적 객체 경로를 분석함
- 정적 객체 감지 : LiDAR, Camera
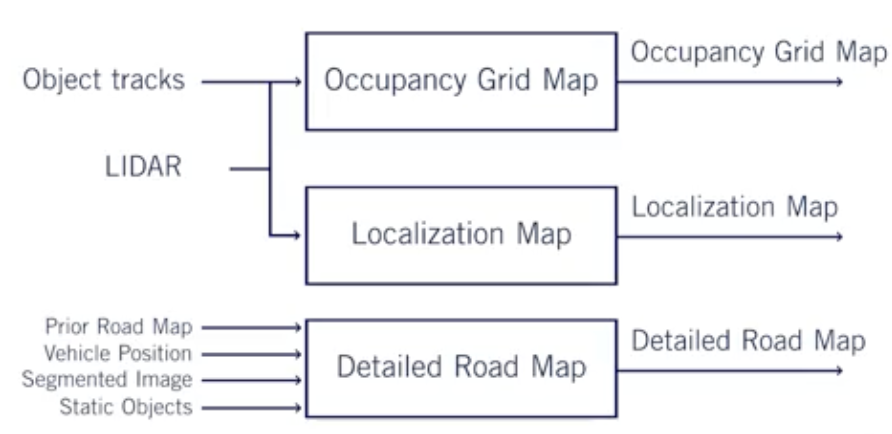
- 환경 매핑 : 환경 지도 제작
- Occupancy Grid Map : 정적 객체 맵
- Localization Map
- Detailed Road Map
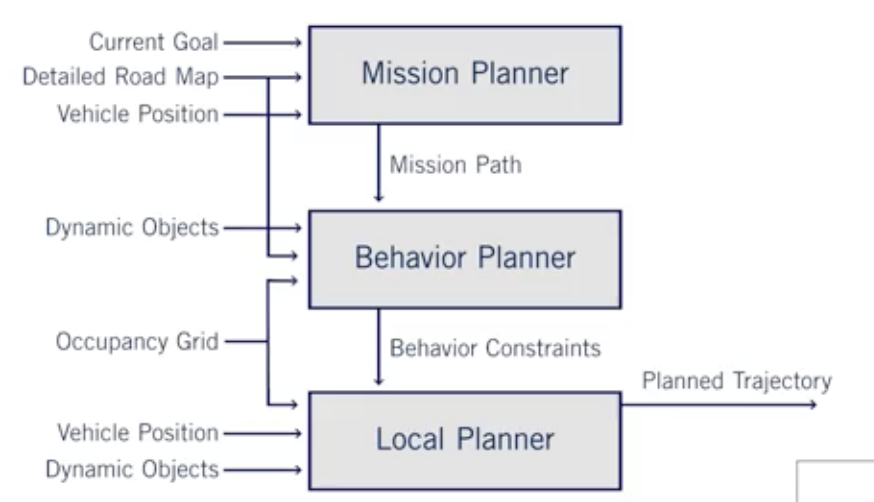
- 모션 플래닝 : 경로 계획
- Mission Planner : 전체 경로를 생성함
- Behavior Planner : 동적 객체, 안전 정책을 통해 경로 계획 및 동작 계획
- Local Planner : 즉각적인 경로 계획 : 특정 경로 및 속도 계획
- 컨트롤러
- 종방향
- 횡방향
- 시스템 슈퍼바이저 : 시스템 관리
Lesson4. Environment Representation
-
Localization Map : LiDAR&Camera(+GPS, IMU, 휠 오도메트리)
이미 저장된 Localization Map 과 입력되는 LiDAR 데이터를 비교하여 위치를 추정함(SLAM). GPS, IMU, 휠오도메트리 데이터를 이용해 글로벌 좌표와 더 정확한 위치 추정이 가능함.
-
Occupancy Grid Map : 정적 장애물
PointCloud 데이터에서 필요한 정적 객체를 표현함.
간섭하지 않는 정적 객체, 동적 객체는 제거함
필터가 정확하지 않을 수 있으므로 주변 확률을 확률적으로 나타낸다고 생각하면 좋음
→ 충돌 방지 경로 생성
-
Detail RoadMap : 교통 규제, 차선 규제 정보가 포함됨.
→ 안전하고 효율적인 경로를 계획함
- 완전 온라인 : 모든 정적 객체에 레이블이 정확하게 지정 및 위치 또한 정확하다는 것을 전제로 함. 실시간으로 생성하기엔 시간복잡도 때문에 거의 불가능. 따라서 거의 쓰지 않음.
- 완전 오프라인 : 라이다 등 정확도가 높은 센서를 차량에 장착해서 주기적으로 구역을 돌면서 맵을 생성함. 정확하지만 실시간 업데이트가 불가능하다.
- 오프라인 생성&온라인 업데이트
차선, 중앙선을 빨간색으로 표시하여 경로 추종 및 제어를 하기 편하게 제작함.
