0.Intro
Semantic Segmentation Task를 학습하는데는 2가지 데이터가 필요합니다:
(Input) X Data : 학습할 Image dataset
(Input) Y Data : 학습할 Image에 대응되는 Color Map Image file
특히, Y Data 의 경우에 “JPG” 포맷이 아닌 “PNG” 포맷을 사용하게 됩니다.
JPG 포맷은 손실 압축을 사용하기 때문에, 용량이 작다는 장점이 있지만
사용자의 눈에 잡히지 않는 특정 부분의 Color 값이 변경된다는 특징이 있습니다.
이번 글에서는 Semantic Segmentation의 Label Image를 생성하는 방법과 일반적인 Image Data 와의 차이점을 살펴보도록 하겠습니다.
1. About Semantic Segmentation
시작하기에 앞서, Semantic Segmentation Task가 정확히 어떤 Task인지 알아야 합니다.
Semantic Segmentation Task의 경우,
전체 이미지에 대해 각각의 픽셀이 어느 Label(=Category)에 속하는지 분류하는 문제입니다.
정교한 분류를 해내야 하기 때문에 Atrous Convolution과 같은 Receptive Field(수용 영역, 필터가 한 번에 볼 수 있는 영역)가 넓은 합성 곱 연산을 주로 사용합니다.
DeepLab V3+ 코드 중에서, 가장 중요한 Loss Function 구현 부분을 보도록 하겠습니다.
(Github Repository
: https://github.com/jfzhang95/pytorch-deeplab-xception)
import torch
import torch.nn as nn
class SegmentationLosses(object):
def __init__(self, weight=None, batch_average=True, ignore_index=255, cuda=False):
self.ignore_index = ignore_index
self.weight = weight
self.batch_average = batch_average
self.cuda = cuda
def build_loss(self, mode='ce'):
"""Choices: ['ce' or 'focal']"""
if mode == 'ce':
return self.CrossEntropyLoss
elif mode == 'focal':
return self.FocalLoss
else:
raise NotImplementedError
def CrossEntropyLoss(self, logit, target):
n, c, h, w = logit.size()
criterion = nn.CrossEntropyLoss(weight=self.weight, ignore_index=self.ignore_index,
reduction='mean')
if self.cuda:
criterion = criterion.cuda()
loss = criterion(logit, target.long())
if self.batch_average:
loss /= n
return loss
def FocalLoss(self, logit, target, gamma=2, alpha=0.5):
n, c, h, w = logit.size()
criterion = nn.CrossEntropyLoss(weight=self.weight, ignore_index=self.ignore_index,
reduction='mean')
if self.cuda:
criterion = criterion.cuda()
logpt = -criterion(logit, target.long())
pt = torch.exp(logpt)
if alpha is not None:
logpt *= alpha
loss = -((1 - pt) ** gamma) * logpt
if self.batch_average:
loss /= n
return loss위의 DeepLab V3+ Repository에 구현되어 있는 Loss Function 입니다.
여기서 우리는 핵심적인 코어 함수가 nn.CrossEntropyLoss 임을 알 수 있습니다.
Cross-Entropy Loss Function(이하 CE Loss)은 Semantic Segmentation Task(이하 분할 문제)이전에 분류 문제(Classification)에서 자주 쓰이는 손실 함수입니다.
그럼 왜 분류 문제와 분할 문제는 둘다 CE Loss를 쓰는 것일까요?
1) 분류 문제(Classification) 에서는 이미지 1장 전체에 대한 Label을 분류합니다.
(ex. 이 사진은 고양이 사진입니다!)2) 분할 문제(Semantic Segmentation) 에서는 이미지 1장 내의 1개 픽셀에 대한 Label을 분류합니다.
(ex. 이 픽셀은 고양이에 해당하는 픽셀입니다!)
위에서 서술 하였듯이, 두 문제 모두 분류를 하긴 하지만 Classification 문제의 경우는 이미지 전체를 분류하고,
Semantic Segmentation 문제의 경우는 1개 픽셀에 대해서만 분류합니다.
(분류 문제 신경망에서, Batch Size가 1이라고 가정한다면 단순히
True-Label 1개와 Predicted-Label 1개를 비교하는 것처럼,
True-Label’s 1–pixel과 Predicted-Label’s 1-pixel을 비교하는 것입니다.
이는 이미지의 width * height 수만큼 반복됩니다.)
1개 픽셀이라고 한다면?
일반적인 Color Image는 3채널의 RGB 값이 들어오지만,
CE Loss를 사용하는 분할 문제 특성 상 1개 채널의 값이 들어오는데 이 값이 바로 Label Value가 되는 것입니다.
최종적으로, Semantic Segmentation Task의 학습 방식은
- 1개 픽셀 별로 Label 값을 다르게 준다.(Dataset 측면)
- CE Loss를 통해 손실 값을 구한다.
- Optimizer(SGD, Adam etc.)를 사용하여 해당 손실 값을 backward 방향으로 가중치를 갱신한다.
3단계로 볼 수 있습니다.
2. cv2.imwrite( ) vs Pascal VOC Annotation
Label Image 제작에 앞서, 실제로
- 일반적인 이미지 저장 함수 cv2.imwrite를 사용하여 저장한 Label Image
- Pascal VOC의 Semantic Segmentation Task의 Annotation Label Image
를 비교해 보았습니다.
(Pascal VOC Dataset : host.robots.ox.ac.uk/pascal/VOC/voc2007)
Mac OS — file command in terminal

위 이미지는 2개의 이미지를 Terminal 상에서 file command로 읽어온 결과입니다.
2009_001625.png — RAW Image file

2009_001625.png 파일은 Pascal VOC Dataset에서 가져온 파일이고,
2009_001625_RGB.png 파일은 cv2.imwrite( ) 함수로 저장한 파일입니다.
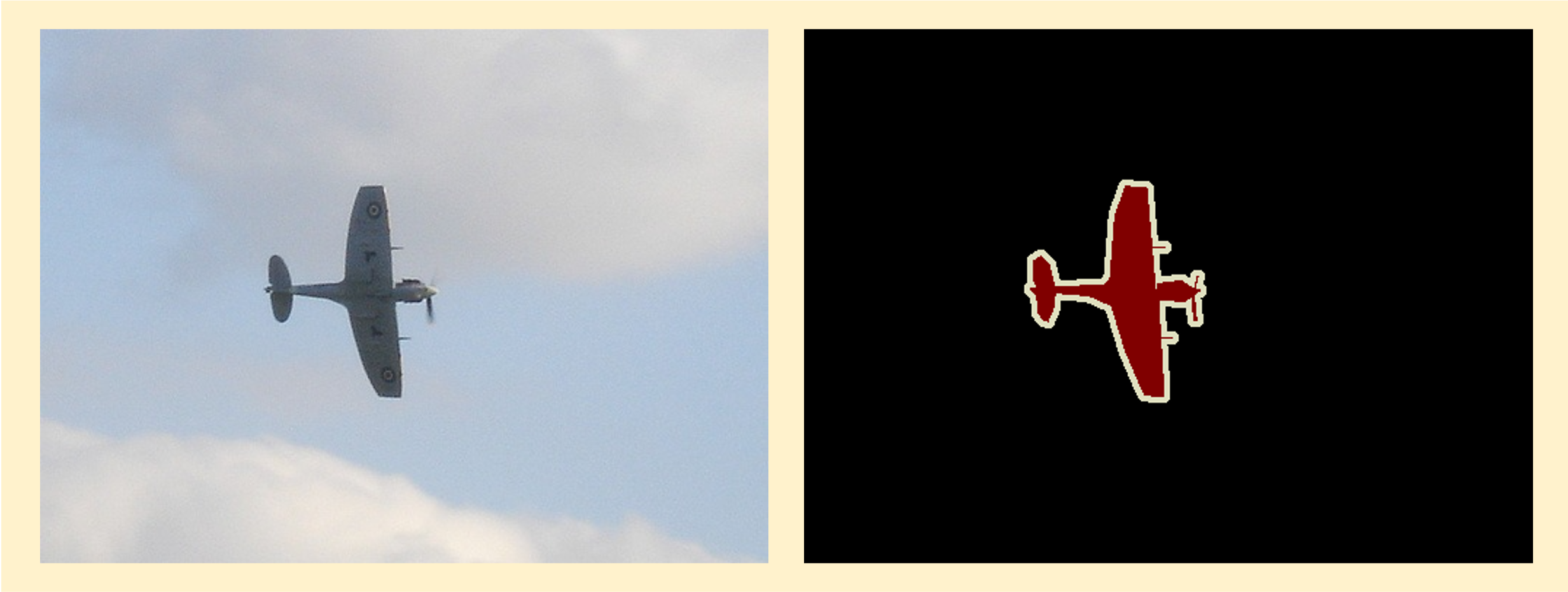
| 2009_001625.png(VOC IMAGE) | 2009_001625_RGB.png(cv2.imwrite IMAGE) |
|---|---|
 |  |
명령어 결과를 보면, VOC Image는 8-bit colormap 파일이지만 cv2.imwrite로 저장한 Image는 8-bit/color RGB 파일입니다.
사람이 보기엔, 육안상으로는 어떤 차이가 있을까요?
어떤 이미지가 Pascal VOC인지 모를 정도로 너무 유사합니다…
육안상으로도 전혀 차이점이 없습니다.
차이점이라고는 위에서 언급한 8-bit colormap이냐, 8-bit/color RGB 파일이냐 차이입니다.
우리는 여기서 PNG 포맷의 특성과 Label Image와의 관계에 대해 알아볼 필요가 있습니다.
3. PNG Format and Segmentation Label Image
PNG 포맷을 사용하는 이유는 JPG와 같은 손실압축 방식이 아닌,
원본 그대로의 Color 값을 저장합니다.
그리고 아주 중요한 특징이 하나 더 있는데, 바로
Palette 정보를 넣을 수 있다는 점입니다.
Palette 정보가 이미지에 들어가게 되면 Image Array는 더 이상 3채널이어야 할 필요가 없어집니다. 이를
“Indexed Image”
라고 부릅니다.
말 그대로 “색인화 된 이미지” 인 것이죠.
Index 정보는 Palette가 되는 것이고, Image Array에는 단순히 1채널의 공간에 색인 정보(Index value)만 넣어주면 됩니다.
추후에 Palette를 바꾸게 되면, Image의 색상 값도 바뀌게 되는 것입니다.
Semantic Segmentation은 Pixel에 대한 라벨 값을 학습할 때, 이 Index value를 학습하게 됩니다.
4. How create... Label Image?
위에서
1) 왜 PNG 포맷을 사용해야 하는지,
2) Indexed Image란 무엇인지,
3) 왜 cv2.imwrite( )와 같은 일반적인 이미지 저장 함수로 저장하면 안되는지
알아보았습니다.
이제는 Polygon 타입의 Label Image (for Segmentation)를 제작해보겠습니다.
준비물은 다음과 같습니다:
- Color Map과 Palette 정보
- 저장할 Image 정보(file 형식, numpy.ndarray 형식 모두 상관 없습니다.)
Color Map을 생성하는 코드입니다.
import numpy as np
def make_colormap(num=256):
def bit_get(val, idx):
return (val >> idx) & 1
colormap = np.zeros((num, 3), dtype=int)
ind = np.arange(num, dtype=int)
for shift in reversed(list(range(8))):
for channel in range(3):
colormap[:, channel] |= bit_get(ind, channel) << shift
ind >>= 3
return colormap
cmap = make_colormap(256).tolist()
palette = [value for color in cmap for value in color]
print(cmap, "\n", palette)위 코드는 Color Map을 생성하는 코드입니다.
Pascal VOC에서 해당 방식으로 Color Map을 생성하여 [20개 라벨 + background] 까지 하여 총 21개의 색상 값을 사용합니다.
우리가 저 코드에서 사용할 변수는 cmap 과 palette 가 있습니다.
cmap 은 Image에 색인 정보를 넣어줄 때 사용할 것이고,
palette 는 PNG 포맷으로 저장할 때 넣어줄 팔레트 정보입니다.
해당 코드 동작 결과는 다음과 같습니다:
[0, 0, 0, 128, 0, 0, 0, 128, 0, 128, 128, 0, 0, 0, 128, 128, 0, 128, 0, 128, 128, … ]
보시다시피 앞에서 3개씩 끊어서 볼 수 있습니다.
예를 들어, 0번 라벨(background)의 경우 RGB 값은 [0, 0, 0]이 될 것이고,
1번 라벨(aeroplane)의 경우 RGB 값은 [128, 0, 0]이 될 것이며,
2번 라벨(bicycle)의 경우 RGB 값은 [0, 128, 0]이 될 것입니다.
(이는 사용자가 직접 값을 넣어줘도 상관없습니다. 본문에서는 Pascal VOC Dataset을 사용하여 실험하였기 때문에, Pascal VOC Dataset의 Category 정보와 색상 정보를 사용하였습니다.)
Color Map과 Palette 정보를 생성하였다면, 이미지에 색인 정보와 Palette를 함께 넣어주기만 하면 됩니다.
Label Image 생성 코드
import cv2
import numpy as np
from PIL import Image
# Image data to save = image_data(numpy.ndarray)
label_img = np.array(image_data)
# if image array has BGR order
label_img = cv2.cvtColor(label_img, cv2.COLOR_BGR2RGB)
# Create an unsigned-int (8bit) empty numpy.ndarray of the same size (shape)
img_png = np.zeros((label_img.shape[0], label_img.shape[1]), np.uint8)
# Assign index to empty ndarray. Finding pixel location using np.where.
# If you don't use np.where, you have to run a double for-loop for each row/column.
for index, val_col in enumerate(cmap):
img_png[np.where(np.all(label_img == val_col, axis=-1))] = index
# Convert ndarray with index into Image object (P mode) of PIL package
img_png = Image.fromarray(img_png).convert('P')
# Palette information injection
img_png.putpalette(palette)
# save image
img_png.save('output.png')위 코드는 실제로 Label Image를 생성하는 코드입니다.
순서는 다음과 같습니다:
- image data를 numpy.ndarray 타입으로 호출합니다.
- BGR 순서라면 RGB 순서로 바꿔줍니다.
- 동일한 크기의 unsigned-int (8bit) ndarray를 생성합니다.
- 각 Color Map의 색상 정보를 찾아서, 색인화 과정을 합니다.
(이미지의 픽셀을 돌며 비교하는 것이 아닌, Color Map의 1-Row에 해당하는 값을 한번에 바꿔주는 형식으로 합니다.)- 색인화 된 이미지 행렬을 'P' mode로 저장합니다.(P mode는 Palette 모드입니다.)
- 위에서 생성한 Palette를 넣어줍니다.
- png format으로 이미지를 저장합니다.
이렇게 하면 Palette 정보가 있는 색인화 된 이미지 파일을 생성할 수 있습니다.
이렇게 생성된 이미지 파일은 바로 Semantic Segmentation의 학습에 사용 가능하며, Predict 함수에서 출력된 결과를 저장할 때도 이러한 방식으로 저장하여 성능 측정이 가능합니다.
5. Result
- Semantic Segmentation의 Label Image 생성 시, 일반적인 이미지 저장 방식으로 저장하면 안됩니다.
- Color Map과 Palette 정보가 포함된, Indexed Image를 제작해야 합니다.
- 그 이유는 Segmentation 학습이 CE Loss를 사용하는데, 여기서 1-Pixel에 대해 1개의 값(=label value)을 비교하기 때문입니다.
- 사용자가 Augmentation 혹은 Annotation 시에, 특정 Color Map을 생성 후에 Pixel의 Label Value에 색인화 시켜주는 작업이 필요합니다.
(상단 소스코드 참조)

좋은 정보글 감사합니다.
글을 읽고 궁금한점이 있어서 여기에 글을 남깁니다...
현제 voc로 변환한 png파일을 가지고 있는데 이를 grayscale로 변환할때
cv2.imwrite 함수를 사용해선 안되는 건가요?
voc png파일을 imwrite로 저장하는 것도 문제가 되는이 여쭤보고 싶습니다