
0. Intro
NMS란? Non-maximum Suppression의 약자로써, 비최대 억제 알고리즘으로 생각하면 된다.
말 그대로, 최대가 아닌 박스들(=Bounding Box)을 삭제하는 알고리즘이다.
Object Detection Task에서 객체에 대한 최종 Bounding Box를 결정지을 때 사용한다.
1. Principle
작동 방식은 다음과 같다.
- Prediction할 이미지를 Network에 Forward 시킨다.
- 출력 가능한 모든 박스를 구한다. (NMS 이전이므로, 수십~수백개의 박스 정보가 나온다.)
- 해당 박스 정보들을 Confidence Score 순으로 정렬한다.
- 박스 정보들의 Confidence Score와, 각 박스 간의 IoU를 바탕으로 하여 NMS를 적용한다.
- NMS 적용 후에는, 알맞는 박스라고 여겨지는 값들만 출력된다.
핵심 키워드를 뽑자면, Confidence Score와 IoU라고 생각한다. (이 두 단어로 구현이 가능함.)
1-1. Confidence-Score?
여기서 Confidence Score(신뢰도, 신뢰 점수)라고 하는 것은
네트워크가 정답을 도출해냈을 때, 그 정답에 대해 n%의 확신도를 갖는다는 의미이다.
예를 들어, A 박스에 대한 Confidence Score가 0.75라면,
네트워크가 생각했을 때 "아, 이 박스를 내가 도출하긴 했는데, 이 박스가 정답일 확률은 75% 정도야." 라는 의미이다.
1-2. IoU?
IoU는 Intersection Over Union의 약자이다.
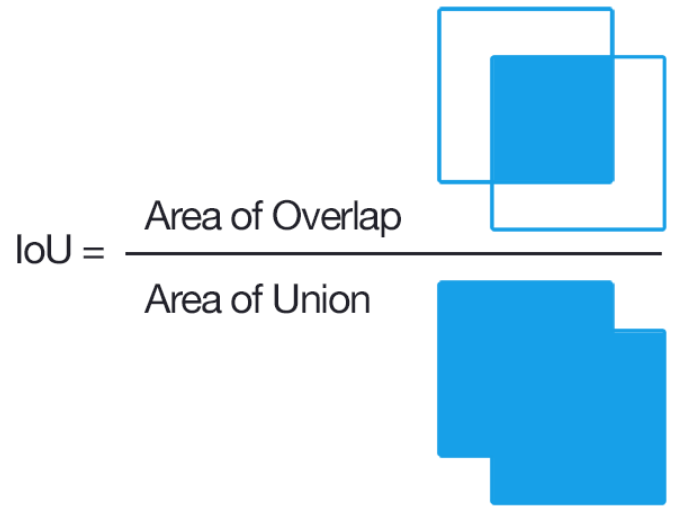
(Object Detection 을 다뤄본 개발자라면 많이 접해봤을 듯한 그림.)
쉽게 말해서, 두 박스의 교집합 / 두 박스의 합집합 이다.
코드로 보자면 다음과 같다.
def iou(box1, box2):
def _is_box_intersect(box1, box2):
if (
abs(box1[0] - box2[0]) < box1[2] + box2[2]
and abs(box1[1] - box2[1]) < box1[3] + box2[3]
):
return True
else:
return False
def _get_area(box): # area of box n.
return box[2] * box[3]
def _get_intersection_area(box1, box2):
# intersection area
return abs(max(box1[0], box2[0]) - min(box1[0] + box1[2], box2[0] + box2[2])) * abs(
max(box1[1], box2[1]) - min(box1[1] + box1[3], box2[1] + box2[3])
)
def _get_union_area(box1, box2, inter_area=None):
area_a = _get_area(box1)
area_b = _get_area(box2)
if inter_area is None:
inter_area = _get_intersection_area(box1, box2)
return float(area_a + area_b - inter_area)
# if boxes do not intersect
if _is_box_intersect(box1, box2) is False:
return 0
inter_area = _get_intersection_area(box1, box2)
union = _get_union_area(box1, box2, inter_area=inter_area)
# intersection over union
iou = inter_area / union
if iou < 0:
iou = 0
assert iou >= 0, f"Measure is wrong! : IoU Value is [{iou}]."
return ioubox1과 box2가 입력으로 왔을 때, 두 박스의 IoU를 계산해주는 코드이다.
box의 좌표 체계는 [center_x, center_y, width, height] 이고, 상대 좌표 이다.
(YOLO의 라벨링 방법이라고 생각하면 된다.)
2. Sample Code
코드로 살펴보자.
임의로 박스 정보들을 생성해주고, Confidence Score 값도 넣어주었다.
colorset = [
(0, 0, 255), # Red
(0, 255, 0), # Green
(255, 0, 0), # Blue
(255, 255, 0), # Cyan
(255, 0, 255), # Magenta
(0, 255, 255) # Yellow
]
width, height = 600, 600
boxes = [
# left sector boxes
[0.3, 0.3, 0.1, 0.1, 0.9], # Red
[0.31, 0.28, 0.14, 0.13, 0.5], # Green
[0.28, 0.28, 0.09, 0.11, 0.3], # Blue
# right sector boxes
[0.75, 0.65, 0.2, 0.2, 0.99], # cyan
[0.7, 0.63, 0.22, 0.18, 0.35], # magenta
[0.75, 0.62, 0.22, 0.22, 0.77], # yellow
]박스 정보는 [center_x, center_y, width, height, conf_score] 순으로 구성되어 있고,
절대 좌표이다. (0~1 사이로 스케일링 된 값)
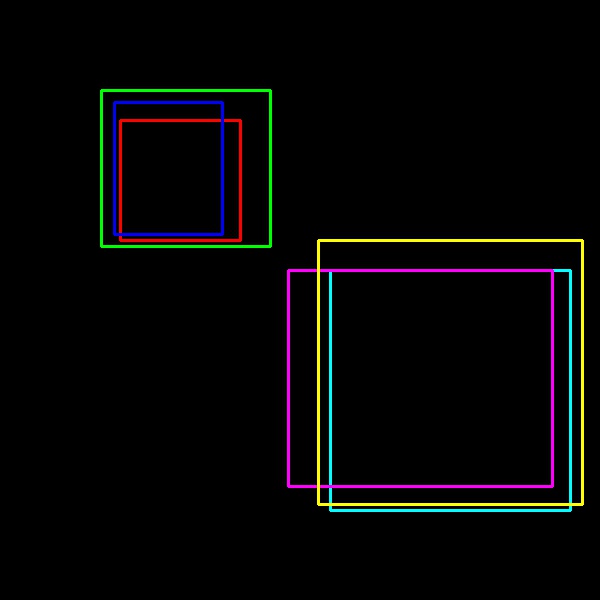
해당 박스들을 600 * 600의 빈 캔버스에 그려보면, 다음과 같은 박스를 볼 수 있다.
(박스 그려주는 코드)
canvas = np.zeros((width, height, 3)).astype('uint8') # empty canvas
canvas_copy = canvas.copy() # for after nms
for index, box in enumerate(boxes):
cv2.rectangle(canvas, (int(width * box[0] - width * box[2]), int(height * box[1] - height * box[3])),
(int(width * box[0] + width * box[2]), int(height * box[1] + height * box[3])),
colorset[index], 2)임의로 만든 박스들이기 때문에, 우리는 어떤 것이 NMS 통과 후에 남아야 하는지 알 수 있다.
바로 Red와 Cyan 색상의 박스만 남아야 한다.
(이유는, 좌/우측 섹터 기준으로 신뢰 점수가 가장 높기 때문이다.)
그리고, NMS(boxes, iou_thres=0.4) 함수를 작성해주었다. (중간에 출력을 디버깅해볼 수 있는 print문이 있다.)
def nms(boxes, iou_thres=0.4):
elems = np.array(boxes)
print("\nBefore Arrange")
print(elems)
# sorting
sorted_index = np.argsort(elems[:, -1])[::-1]
sorted_boxes = elems[sorted_index]
print("\nAfter Arrange")
print(sorted_boxes)
answer = [True for x in range(sorted_boxes.shape[0])]
print("\nBefore NMS Answer :", answer)
for i in range(sorted_boxes.shape[0]):
if answer[i] is False:
continue
for j in range(sorted_boxes.shape[0]):
iou_val = iou(sorted_boxes[i], sorted_boxes[j])
print(f"{i} vs {j} = iou {round(iou_val, 3)}")
if iou_val >= iou_thres and int(iou_val) != 1:
answer[j] = False
print(f"Index {j} is False.")
print("\nAfter NMS Answer :", answer)
return answer, sorted_boxes, sorted_index순서는 1. 원리에서 본 것과 동일하다.
sorted_index = np.argsort(elems[:, -1])[::-1]
sorted_boxes = elems[sorted_index]여기 부분에서 Confidence Score 순으로 box 정보들을 정렬하고,
for i in range(sorted_boxes.shape[0]):
if answer[i] is False:
continue
for j in range(sorted_boxes.shape[0]):
iou_val = iou(sorted_boxes[i], sorted_boxes[j])
print(f"{i} vs {j} = iou {round(iou_val, 3)}")
if iou_val >= iou_thres and int(iou_val) != 1:
answer[j] = False
print(f"Index {j} is False.")부분에서 실제로 IoU 값을 구하면서, 탈락 여부를 결정한다.
IoU Threshold를 0.4로 설정하였기 때문에,
박스 간의 IoU 값이 0.4 이상인 경우에는, Confidence Score가 낮은 박스가 탈락한다.
탈락 여부는 answer = [True for x in range(sorted_boxes.shape[0])] 로 미리 박스 개수만큼 True를 적어두고,
탈락된 박스 자리에 False를 기록한다.
디버깅 출력물은 다음과 같다.
- 정렬 이전의 box 정보들
Before Arrange
[[0.3 0.3 0.1 0.1 0.9 ]
[0.31 0.28 0.14 0.13 0.5 ]
[0.28 0.28 0.09 0.11 0.3 ]
[0.75 0.65 0.2 0.2 0.99]
[0.7 0.63 0.22 0.18 0.35]
[0.75 0.62 0.22 0.22 0.77]]- 정렬 이후의 box 정보들 (confidence score 순서로 잘 정렬되었다.)
After Arrange
[[0.75 0.65 0.2 0.2 0.99]
[0.3 0.3 0.1 0.1 0.9 ]
[0.75 0.62 0.22 0.22 0.77]
[0.31 0.28 0.14 0.13 0.5 ]
[0.7 0.63 0.22 0.18 0.35]
[0.28 0.28 0.09 0.11 0.3 ]]- Answer라는 변수를 두고, 탈락 여부를 위한 리스트를 생성했다.
Before NMS Answer : [True, True, True, True, True, True]- NMS 동작 과정, 탈락하면 Answer[index]에 False를 기록한다.
0 vs 0 = iou 1.0
0 vs 1 = iou 0
0 vs 2 = iou 0.754
Index 2 is False.
0 vs 3 = iou 0
0 vs 4 = iou 0.519
Index 4 is False.
0 vs 5 = iou 0
1 vs 0 = iou 0
1 vs 1 = iou 1.0
1 vs 2 = iou 0
1 vs 3 = iou 0.469
Index 3 is False.
1 vs 4 = iou 0
1 vs 5 = iou 0.463
Index 5 is False.: 원래는 자기 자신과는 비교하면 안되는데, 그냥 비교하게 짰다. (심플하게)
그 부분 처리를 위해 코드에 int(iou_val) != 1인 조건을 추가하였다.
(iou_val이 1이라는 뜻은, 자기 자신과 비교한 경우이다.)
이제 보면, 2개의 경우가 있다.
- IoU가 0.4보다 작을 경우
- IoU가 0.4보다 클 경우
1) 작을 경우는, 살아남는 박스이다.
2) 클 경우는, 탈락하는 박스이다.
(0.9 conf의 박스와 0.4 conf의 박스를 비교하여 iou_val == 0.5라고 한다면, 0.4 conf의 박스가 탈락한다.)
- NMS 이후에 살아남는 박스의 index, Answer 변수에 boolean 값으로 알 수 있다.
After NMS Answer : [True, True, False, False, False, False]return 되는 값은, Answer 변수와 sorted_boxes, sorted_index를 반환해주었다.
main 문에서 박스를 잘 볼 수 있게 하기 위함이다.
3. Result
main 문에서 다음과 같이 NMS 함수를 호출한다.
answer, sorted_boxes, sorted_index = nms(boxes, iou_thres=0.4)여기서 boxes는 before Arrange 박스들이다.
그리고, answer과 sorted_boxes, sorted_index 정보를 바탕으로,
새로운 비어있는 canvas에 그려준다.
for index, datum in enumerate(zip(sorted_boxes, sorted_index)):
sbox, sidx = datum
if answer[index] is True:
cv2.rectangle(canvas_copy, (int(width * sbox[0] - width * sbox[2]), int(height * sbox[1] - height * sbox[3])),
(int(width * sbox[0] + width * sbox[2]), int(height * sbox[1] + height * sbox[3])),
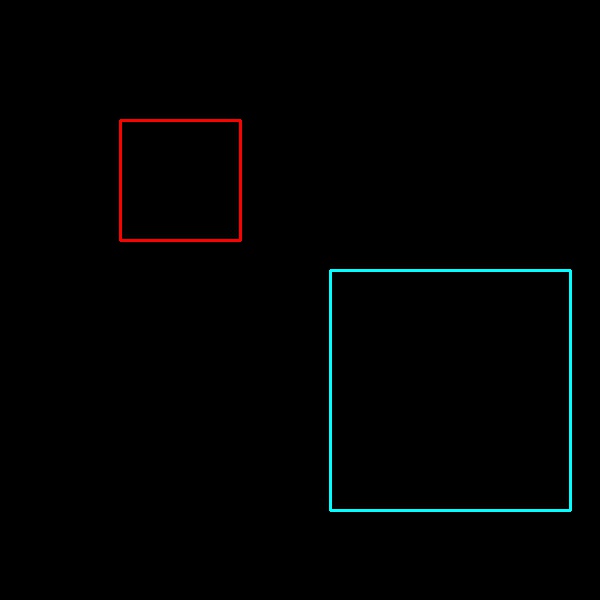
colorset[sidx], 2)(Answer 변수가 True 인 box만 그려준다.)
그러면, 다음과 같이 Red와 Cyan 색상의 박스만 남은 것을 알 수 있다.
4. Full Code
import cv2
import numpy as np
def iou(box1, box2):
def _is_box_intersect(box1, box2):
if (
abs(box1[0] - box2[0]) < box1[2] + box2[2]
and abs(box1[1] - box2[1]) < box1[3] + box2[3]
):
return True
else:
return False
def _get_area(box): # area of box n.
return box[2] * box[3]
def _get_intersection_area(box1, box2):
# intersection area
return abs(max(box1[0], box2[0]) - min(box1[0] + box1[2], box2[0] + box2[2])) * abs(
max(box1[1], box2[1]) - min(box1[1] + box1[3], box2[1] + box2[3])
)
def _get_union_area(box1, box2, inter_area=None):
area_a = _get_area(box1)
area_b = _get_area(box2)
if inter_area is None:
inter_area = _get_intersection_area(box1, box2)
return float(area_a + area_b - inter_area)
# if boxes do not intersect
if _is_box_intersect(box1, box2) is False:
return 0
inter_area = _get_intersection_area(box1, box2)
union = _get_union_area(box1, box2, inter_area=inter_area)
# intersection over union
iou = inter_area / union
if iou < 0:
iou = 0
assert iou >= 0, f"Measure is wrong! : IoU Value is [{iou}]."
return iou
def nms(boxes, iou_thres=0.4):
elems = np.array(boxes)
print("\nBefore Arrange")
print(elems)
# sorting
sorted_index = np.argsort(elems[:, -1])[::-1]
sorted_boxes = elems[sorted_index]
print("\nAfter Arrange")
print(sorted_boxes)
answer = [True for x in range(sorted_boxes.shape[0])]
print("\nBefore NMS Answer :", answer)
for i in range(sorted_boxes.shape[0]):
if answer[i] is False:
continue
for j in range(sorted_boxes.shape[0]):
iou_val = iou(sorted_boxes[i], sorted_boxes[j])
print(f"{i} vs {j} = iou {round(iou_val, 3)}")
if iou_val >= iou_thres and int(iou_val) != 1:
answer[j] = False
print(f"Index {j} is False.")
print("\nAfter NMS Answer :", answer)
return answer, sorted_boxes, sorted_index
if __name__ == "__main__":
colorset = [
(0, 0, 255),
(0, 255, 0),
(255, 0, 0),
(255, 255, 0),
(255, 0, 255),
(0, 255, 255),
(0, 124, 0),
(0, 0, 124),
]
width, height = 600, 600
boxes = [
# left boxes
[0.3, 0.3, 0.1, 0.1, 0.9], # Red
[0.31, 0.28, 0.14, 0.13, 0.5], # Green
[0.28, 0.28, 0.09, 0.11, 0.3], # Blue
# right boxes
[0.75, 0.65, 0.2, 0.2, 0.99], # cyan
[0.7, 0.63, 0.22, 0.18, 0.35], # magenta
[0.75, 0.62, 0.22, 0.22, 0.77], # yellow
]
canvas = np.zeros((width, height, 3)).astype('uint8')
canvas_copy = canvas.copy()
for index, box in enumerate(boxes):
cv2.rectangle(canvas, (int(width * box[0] - width * box[2]), int(height * box[1] - height * box[3])),
(int(width * box[0] + width * box[2]), int(height * box[1] + height * box[3])),
colorset[index], 2)
answer, sorted_boxes, sorted_index = nms(boxes, iou_thres=0.4)
for index, datum in enumerate(zip(sorted_boxes, sorted_index)):
sbox, sidx = datum
if answer[index] is True:
cv2.rectangle(canvas_copy, (int(width * sbox[0] - width * sbox[2]), int(height * sbox[1] - height * sbox[3])),
(int(width * sbox[0] + width * sbox[2]), int(height * sbox[1] + height * sbox[3])),
colorset[sidx], 2)
# print(canvas)
cv2.imshow("Before NMS", canvas)
cv2.imshow("After NMS", canvas_copy)
cv2.imwrite("before_nms.jpg", canvas)
cv2.imwrite("after_nms.jpg", canvas_copy)
cv2.waitKey(0)