1.triangulation(삼각측량)
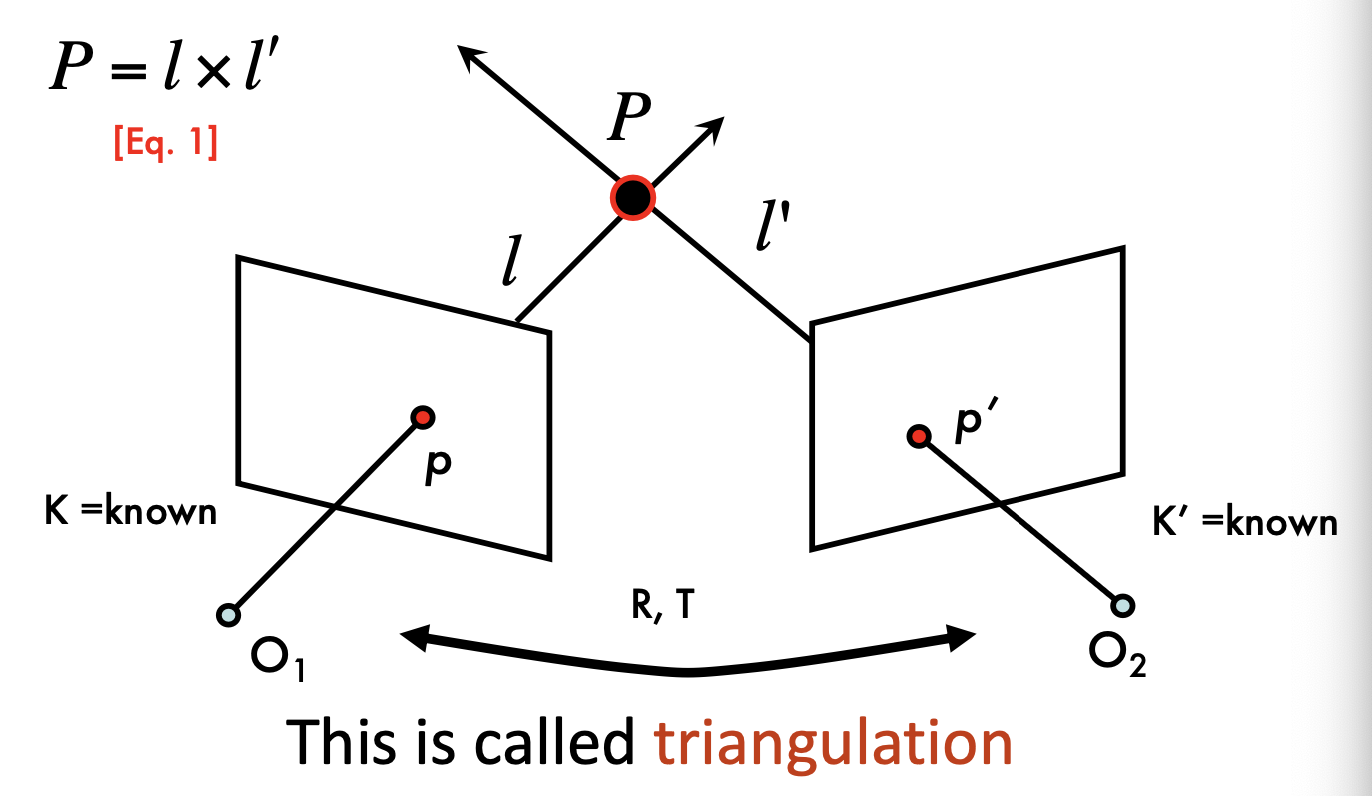
삼각측량은 두 개의 다른 관점(카메라 혹은 관찰점)에서 동일한 점을 관찰하여 그 점의 3차원 위치를 계산하는 기법이다.
두 개의 카메라 과 는 각각 평면 상의 점 와 를 관찰하고, 이 두 점으로부터 3차원 공간의 점 를 계산한다.
두 직선 과 의 교차점으로 3차원 점 를 찾는 방법을 나타낸다. 이 교차점가 삼각측량을 통해 구하고자 하는 3차원 위치이다.
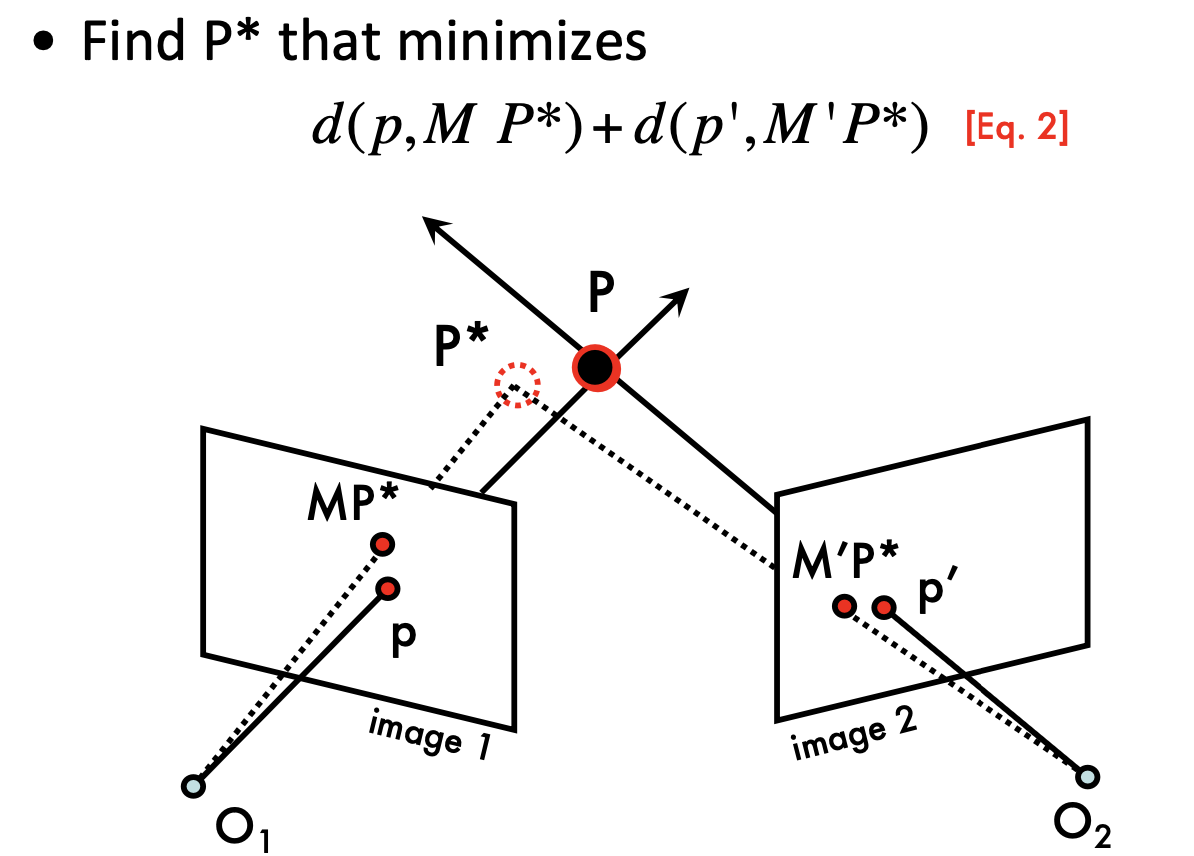
점 의 추정된 위치를 라고 하고, 이 의 위치를 최적화하여 실질적인 점 에 가장 가까운 위치를 찾는다.
최적화 문제의 목표는 두 이미지 평면에서의 예측된 점 와 가 실제 관찰된 점 와 에 최대한 가까워지도록 만드는 것이다.
방정식 는 이 과정에서 최소화해야 할 거리의 합이다. 두 이미지에서 예측된 점과 실제 점 사이의 유클리드 거리를 최소화하는 것을 목표로 한다. 이 과정을 통해 최적의 삼각측량 위치 를 찾을 수 있다.
2.Multi (stereo)-view geometry
-
Camera geometry: 두 이미지에서 대응되는 점들이 주어졌을 때, 카메라 행렬, 위치, 자세를 찾는다. 카메라가 3차원 공간에서 어떻게 배치되고 방향이 정해졌는지를 결정하는 과정이다.
-
Scene geometry: 두 개 또는 그 이상의 이미지에서의 projection(투영)을 이용해 3D 공간에서 점의 좌표를 찾는 과정이다. 이는 삼각측량 방법 등을 사용해 해당 3차원 점의 정확한 위치를 계산한다.
-
Correspondence: 하나의 이미지에서 주어진 점 에 대해, 다른 이미지에서 그에 대응하는 점 를 찾는다.
스테레오 비전에서 대응점을 정확하게 찾는 것이 이후의 3D 재구성이나 물체 추적 등에 매우 중요한 역할을 한다.
3.Epipolar geometry
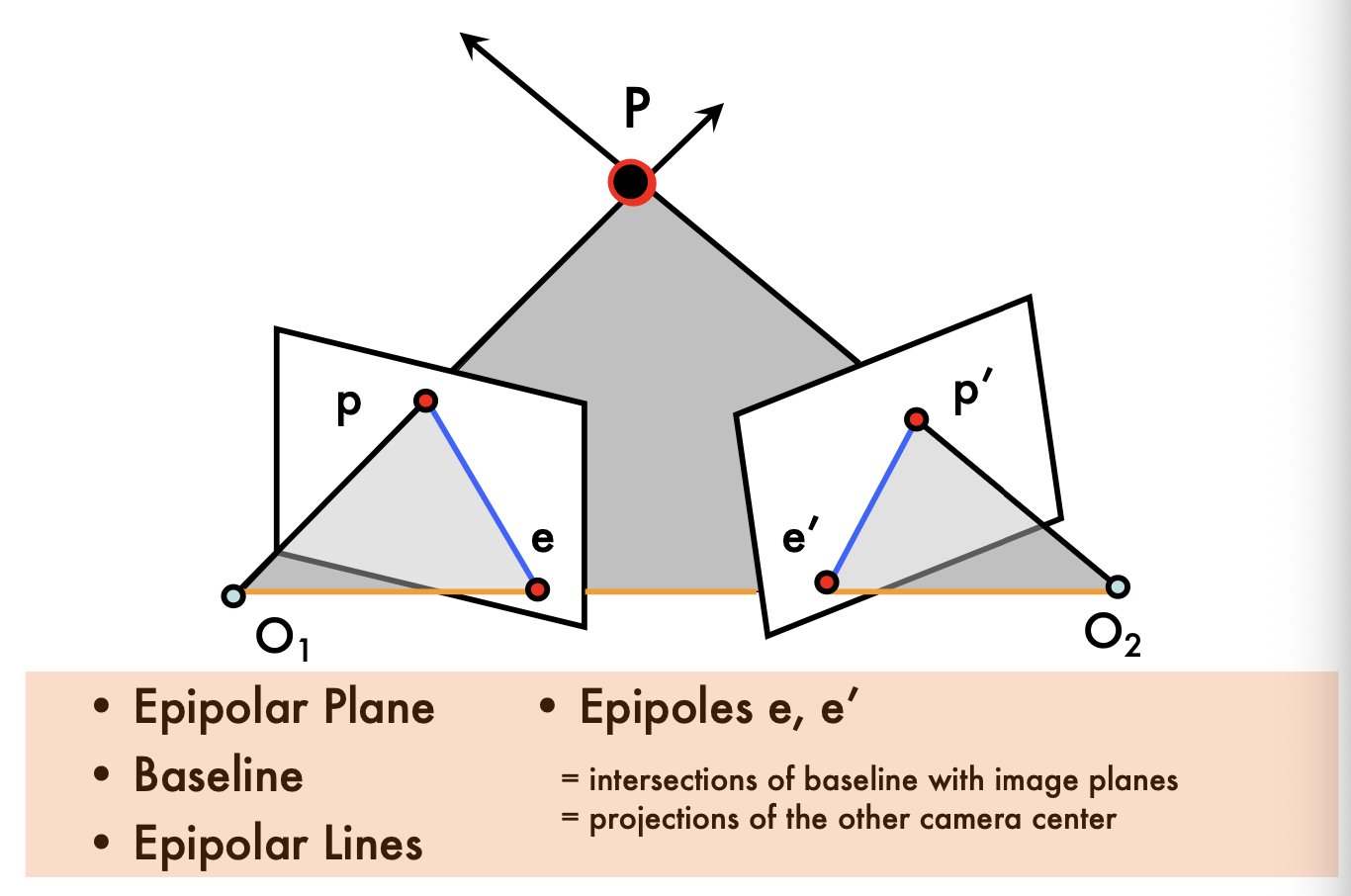
에피폴라 기하학은 두 개의 서로 다른 관점에서 동일한 3D 점을 관찰할 때 이미지 평면에서 발생하는 기하학적 관계를 다룬다.
-
Epipolar Plane (에피폴라 평면): 두 카메라의 중심점 과 그리고 3D 점 를 포함하는 평면이다. 이 평면은 각 이미지 평면에서 에피폴라 선을 정의한다.
-
Baseline : 두 카메라 중심 과 를 연결하는 선이다.
-
Epipolar Lines (에피폴라 선): 에피폴라 평면이 이미지 평면과 만나는 선이다. 각각의 이미지에서 점 가 에피폴라 선 위에 투영된다. 한 이미지에서 점을 선택하면 다른 이미지에서 그에 대응하는 점은 반드시 에피폴라 선 위에 존재해야 한다. 이 특성은 스테레오 매칭 알고리즘에서 계산량을 줄이는 데 매우 유용하다.
-
Epipoles (에피폴 ): 에피폴은 base line이 이미지 평면과 교차하는 점이다. 또한, 하나의 카메라의 중심점이 다른 카메라의 이미지 평면에 투영된 지점이다. 이 점들은 에피폴라 선들의 교차점이며, 모든 에피폴라 선들이 이 점을 지나간다.
3.1 Parallel Image Planes
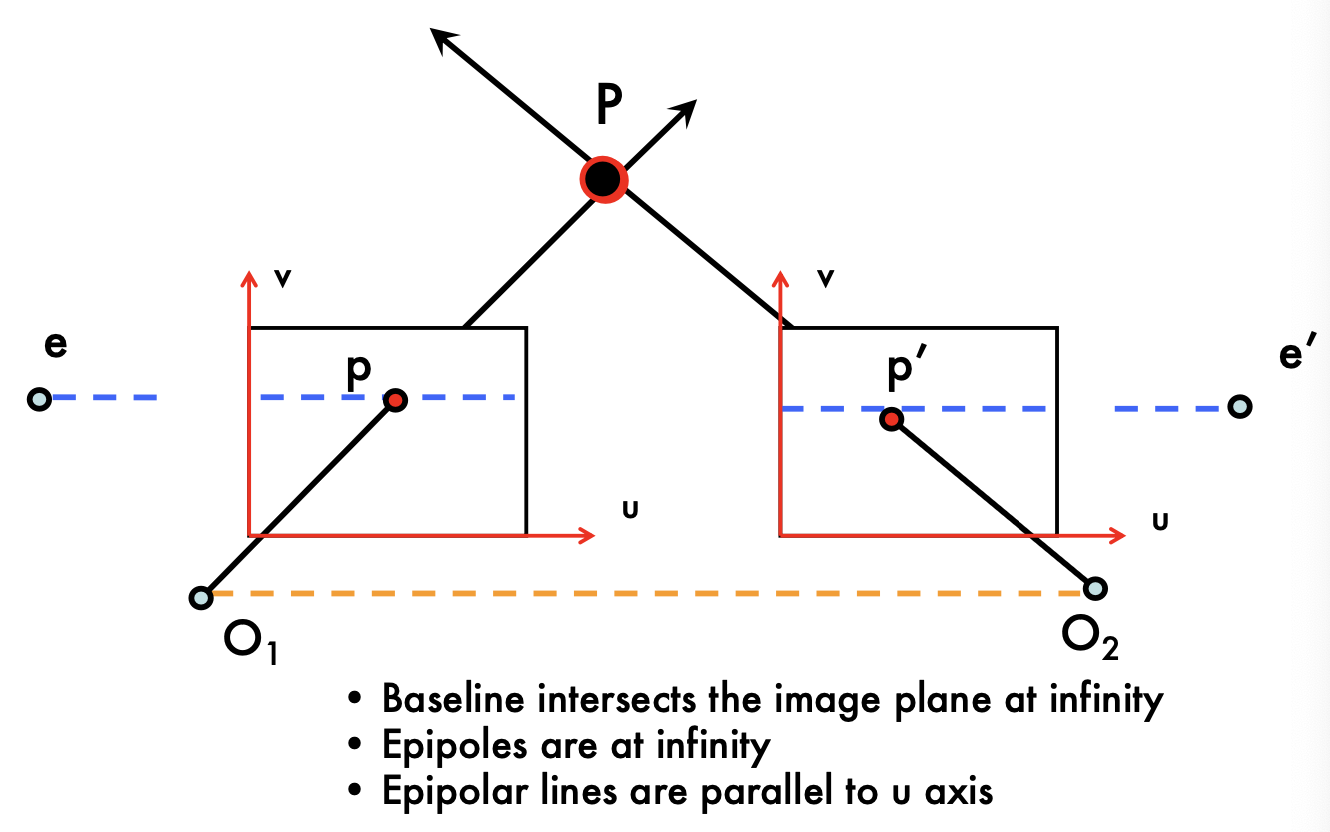
- 두 이미지 평면이 서로 평행한 경우다.
에피폴들은 무한대에 위치하며, 에피폴라 선은 u축에 평행하게 나타난다.
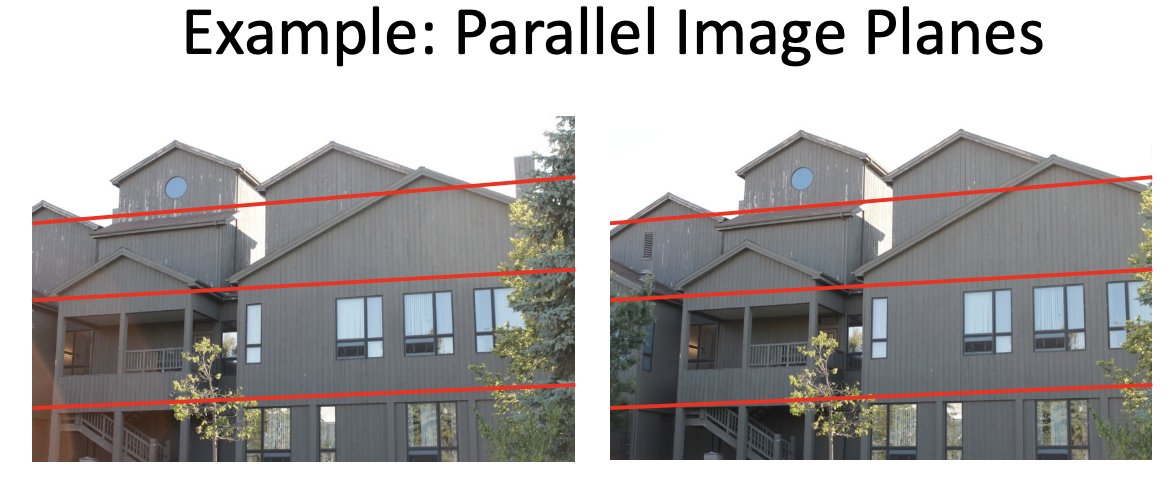
- 예시는 실제 건물 이미지를 통해, 두 이미지 간의 대응점들이 수평선(에피폴라 선)을 따라 어떻게 일치하는지 보여준다.
3.2 Forward Translation:
- 설명: 카메라가 전방으로 이동하는 경우를 설명합니다. 이 경우, 두 이미지에서 에피폴들은 동일한 위치에 있으며, 이는 "확장점(Focus of Expansion, FOE)"이라고 불립니다.
- 예시: 복도 이미지를 사용하여, 전방 이동 시 발생하는 시각적 확장 효과를 나타냅니다.
3.3 Epipolar Constraint:
- 설명: 한 이미지에서 특정 점 ( p )이 주어졌을 때, 다른 이미지에서 대응하는 점 ( p' )이 에피폴라 선을 따라 위치하게 된다는 제약 조건을 설명합니다.
- 예시: 조각상의 얼굴을 예로 들어, 첫 번째 이미지에서 선택한 점의 대응점을 두 번째 이미지에서 찾는 과정을 보여줍니다.
3.4 Epipolar Geometry:
- 설명: 에피폴라 기하학의 기본적인 설정을 시각적으로 나타낸 것입니다. 두 이미지 평면과 에피폴라 평면 간의 관계를 보여주며, 에피폴라 선들이 두 이미지 평면에서 어떻게 형성되는지를 설명합니다.
- 예시: 이전 이미지에서 사용된 조각상 예제를 통해, 에피폴라 선과 그에 따른 대응점을 시각화합니다.
