객체 단위 분석
- (흰색) 객체를 분할하여 특징을 분석
- 객체 위치 및 크기 정보, ROI 추출, 모양 분석 등
- 레이블링 & 외곽선 검출
레이블링
- 서로 연결되어 있는 객체 픽셀에 고유한 번호를 지정 (레이블맵)
- 동일 객체에 속한 모든 픽셀에 고유한 번호를 매기는 작업
- 일반적으로 이진 영상에서 수행
- OpenCV 3.x 버전부터 최신 논문 기반의 레이블링 함수 제공
- Connected component labeling
- 영역 기반 모양 분석
- 픽셀의 연결 관계
- 4-이웃 연결 관계 (4-neighbor connectivity)
- 8-이웃 연결 관계 (8-neighbor connectivity)
- 레이블맵, 바운딩 박스, 픽셀 개수, 무게 중심 좌표를 반환
레이블링 함수
int connectedComponents(InputArray image, OutputArray labels,
int connectivity=8, int ltype=CV_32S);image: (입력) 8비트 1채널 영상labels: (출력) 레이블링 결과 행렬. 레이블맵. Mat 객체connectivity: 4 또는 8ltype: 출력 영상 타입.CV_32S(int) 또는CV_16S(short)반환값: 객체 개수. N을 반환하면 0 ~ (N-1) 사이의 레이블이 존재하며, 0은 배경을 의미 (실제 객체 개수는 N-1)
객체 정보를 함께 반환하는 레이블링 함수
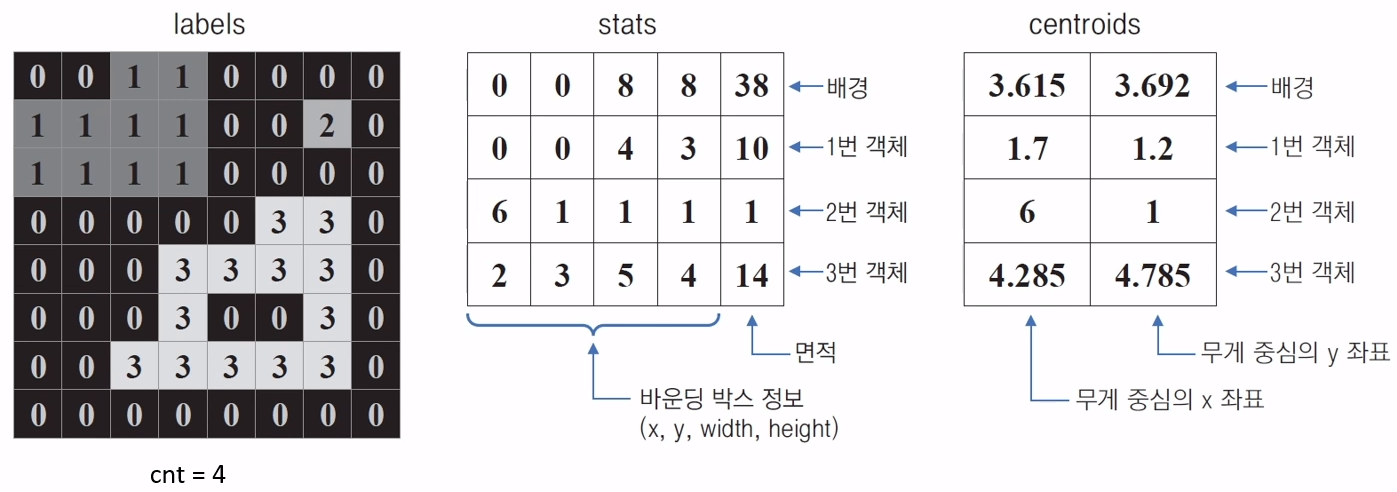
int connectedComponentsWithStats(InputArray image, OutputArray labels,
OutputArray stats, OutputArray centroids,
int connectivity=8, int ltype=CV_32S);
// 사용 예시
Mat labels, stats, centroids;
int cnt = connectedComponentsWithStats(src, labels, stats, centroids);image: (입력) 8비트 1채널 영상labels: (출력) 레이블링 결과 행렬. 레이블맵. Mat 객체stats: (출력) 각 객체의 바운딩 박스, 픽셀 개수 정보를 담은 행렬 (CV_32SC1, N x 5)centroids: (출력) 각 객체의 무게 중심 위치 정보를 담은 행렬 (CV_64FC1, N x 2)connectivity: 4 또는 8ltype: 출력 영상 타입.CV_32S(int) 또는CV_16S(short)반환값: 객체 개수. N을 반환하면 0 ~ (N-1) 사이의 레이블이 존재하며, 0은 배경을 의미 (실제 객체 개수는 N-1)
외곽선 검출 (contour tracing)
- 각 객체의 외곽선 좌표를 모두 검출
- 외곽선 기반 모양 분석
- 바깥쪽 & 안쪽(홀) 외곽선: 외곽선의 계층 구조도 표현 가능
- 다양한 외곽선 처리 함수에서 활용 가능 (근사화, 컨벡스헐 등)
- 외곽선 좌표를 표현하려면?
- 외곽선 점 하나:
Point p; - 객체 하나의 외곽선:
vector<Point> contour; - 여러 객체의 외곽선:
vector<vector<Point>> contours;
- 외곽선 점 하나:
외곽선 검출 함수
int findContours(InputArray image, OutputArray contours,
OutputArray hierarchy, int mode,
int method, Point offset=Point());
int findContours(InputArray image, OutputArray contours,
int mode, int method, Point offset=Point());image: 입력 영상. non-zero 픽셀을 객체로 간주함contours: 검출된 외곽선 정보.vector<vector<Point>>자료형hierarchy: 외곽선 계층 정보.vector<Vec4i>자료형- 네 개의 정수 값이 차례대로,
next,prev,child,parent외곽선 인덱스를 가리킴 - 해당 외곽선이 없으면 -1 지정
- 네 개의 정수 값이 차례대로,
mode: 외곽선 검출 모드, 다음 중 하나를 지정RETR_EXTERNAL: 바깥쪽 외곽선만 검출 (내부 객체 외곽선도 제외)RETR_LIST: 모든 외곽선을 1단계 계층으로 다 검출RETR_CCOMP: 2단계 계층 정보를 가지고 다 검출RETR_TREE: 모든 계층 정보 다 검출
method: 외곽선 근사화 방법, 다음 중 하나를 지정CHAIN_APPROX_NONE: 근사화 없음, 즉 모든 외곽선 정보 다 저장, 대부분 이 옵션으로 사용CHAIN_APPROX_SIMPLE: 수직선, 수평선, 대각선에 대해 끝점만 저장, 메모리를 절약 할 수 있음
offset: 좌표값 이동 옵셋
외곽선 그리기 함수
int drawContours(InputArray image, OutputArray contours,
int contourIdx, const Scalar& color, int thickness=1,
int lineType=LINE_8, InputArray hierarchy=noArray(),
int maxLevel=INT_MAX, Point offset=Point());image: 입력 영상. non-zero 픽셀을 객체로 간주함contours: 외곽선 정보.vector<vector<Point>>자료형contourIdx: 외곽선 인덱스,contourIdx=-1이면 모두 그림
color: 외곽선 색상thickness: 외곽선 두께,thickness < 0이면 내부를 채움
lineType: 선 종류,LINE_4,LINE_8,LINE_AA중 하나hierarchy:findContours()함수에서 구한 외곽선 계층 정보- 계층 정보를 사용하지 않으면
noArray()또는Mat()지정
- 계층 정보를 사용하지 않으면
maxLevel: 그리기를 수행할 최대 외곽선 레벨maxLevel=0이면contourIdx외곽선만 그림INT_MAX이면 모든 외곽선을 그림
offset: 좌표 값 이동 옵셋
OpenCV 외곽선 관련 함수
| function name | description |
|---|---|
| arcLength() | 외곽선 길이를 반환 |
| contourArea() | 외곽선이 감싸는 영역의 면적을 반환 |
| boundingRect() | 주어진 점을 감싸는 최소 크기 사각형(bounding box) 반환 |
| minEnclosingCircle() | 주어진 점을 감싸는 최소 크기 원을 반환 |
| minAreaRect() | 주어진 점을 감싸는 최소 크기 회전된 사각형을 반환 |
| minEnclosingTriangle() | 주어진 점을 감싸는 최소 크기 삼각형을 반환 |
| approxPolyDP() | 외곽선을 근사화(단순화) |
| fitEllipse() | 주어진 점에 적합한 타원을 반환 |
| fitLine() | 직선 모양일 경우, 주어진 점에 적합한 직선을 반환 |
| isContourConvex() | 컨벡스인지를 검사 |
| convexHull() | 주어진 점으로부터 컨벡스 헐을 반환 |
| convexityDefects() | 주어진 점과 컨벡스 헐로부터 컨벡스 디펙트(볼록하게 만들기 위해 추가한 부분)를 반환 |
다각형 검출 프로그램
원 판별하기
- 정해진 외곽선 길이에 대한 넓이 비율이 가장 큰 형태가 원
- 도형의 넓이(A)와 외곽선 길이(P)의 비율을 검사
- 1에 가까워질수록 원에 가깝고, 1보다 많이 작으면 원이 아님
삼각형, 사각형 판별하기
approxPolyDP()함수를 통해 return을 받으면, 꼭지점을 확인해 주는데, 이 때 return=3 이면 삼각형, return=4 이면 사각형으로 도형을 판별할 수 있다.
References
- 자율주행 데브코스 황선규 강사님
First Attempt In Learning