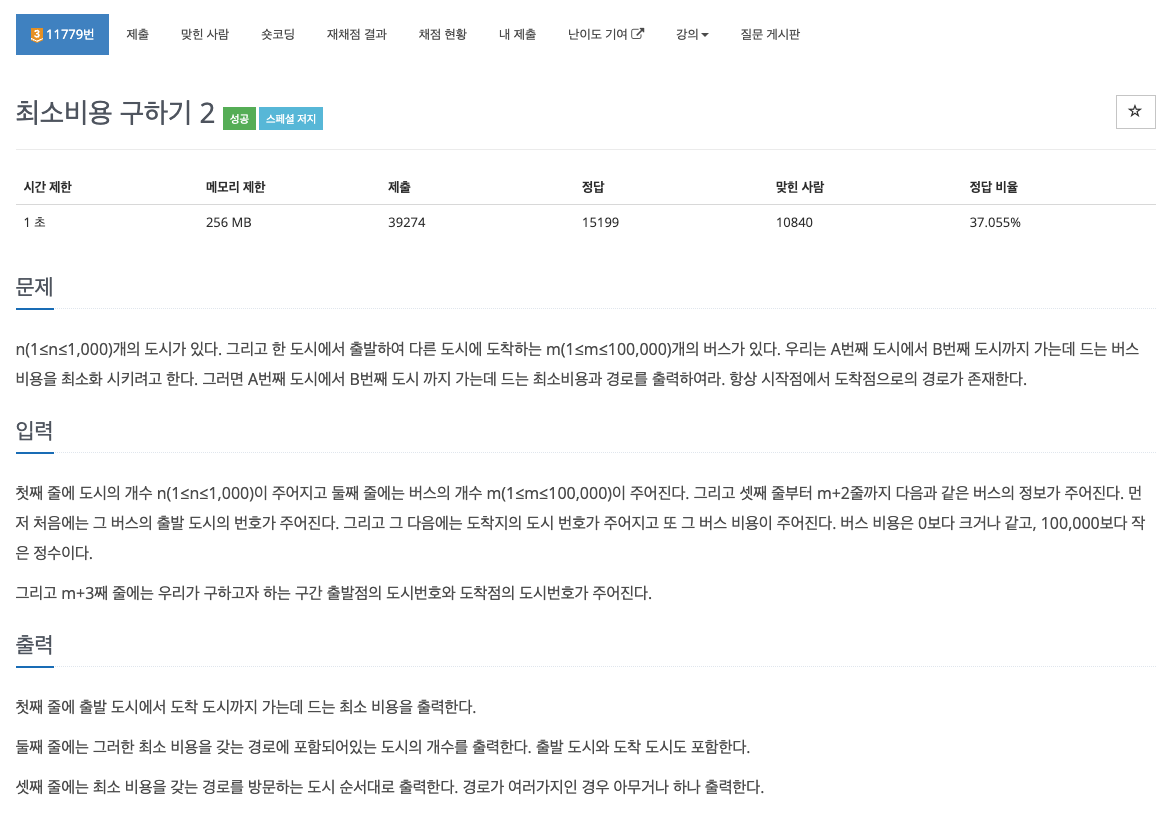
문제 💁🏻♂️
해결 과정
이 문제는 전형적인 다익스트라 알고리즘 문제에서 더 나아가 최단 경로를 추적하는 문제이다.
사고 과정 ❗️
우선, 기본 다익스트라 핵심 알고리즘 코드는 다음과 같다.
from heapq import heappush, heappop
def dijkstra(s, e):
INF = float('inf')
dist = [INF for _ in range(n + 1)]
dist[s] = 0
pq = [(0, s)]
while pq:
min_dist, cur_v = heappop(pq)
if min_dist != dist[cur_v]:
continue
if cur_v == e:
break
for nxt_v, nxt_dist in vertex[cur_v]:
new_dist = min_dist + nxt_dist
if new_dist < dist[nxt_v]:
dist[nxt_v] = new_dist
heappush(pq, (new_dist, nxt_v))
return dist[e]이 코드에서 경로를 추적하기 위한 알고리즘을 추가해주면 된다. 여러 블로그들의 도움을 받아 흐름을 이해할 수 있었다. 그 흐름은 다음과 같다.
- 경로를 추적할 수 있는
path리스트를 하나 만든다. - 최단 거리를 갱신할 때마다
다음 노드 인덱스에 현재 노드 인덱스를 저장한다. - 목적지 노드의 인덱스부터 시작하여 저장된 이전 노드들을 거슬러 올라가면서 경로를 역추적한다.
- 역추적했기 때문에, 결과로 나온 경로의 순서를 뒤집는다.
4-1. 역추적을 편리하게 하기 위해서 deque의 appendleft를 사용해도 좋을 것 같다.
이런 과정을 거쳐 최단 거리로 움직인 경로를 찾아낼 수 있다.(단, 노드의 저장 순서에 따라 여러가지 경로가 나올 수 있다.)
def get_trace(path, e):
trace = [] # 경로 저장 리스트
curr = e
while curr != -1:
trace.append(curr)
curr = path[curr] # 경로 역추적
return trace[::-1] # 역순 반환
def dijkstra(s, e):
path = [-1 for _ in range(n + 1)] # 경로 저장 리스트
while pq:
...
for nxt_v, nxt_dist in vertex[cur_v]:
new_dist = min_dist + nxt_dist
# 최단 거리를 갱신하는 경우
if new_dist < dist[nxt_v]:
path[nxt_v] = cur_v # 다음 노드의 현재 노드를 저장
...
return dist[e], get_trace(path, e) # 목적지까지 최단 거리와 경로 반환 기존 다익스트라 알고리즘에서 추가된 부분만을 강조하여 작성해보았다. 비록 코드 몇 줄만을 추가했지만, 이걸 생각해내는 게 쉽지 않았다. 이 방법이 응용되어 쓰일 수 있으므로 다음 노드에 현재 노드를 저장하면서 경로를 역추적하는 방법을 기억해두자.

이렇게 공부를 한 다음에 코드를 제출했는데 틀렸다. 왜인지 디버깅하면서 이유를 찾아보니 문제에서 요구하는 조건은 단방향 조건이었다. 그러나, 나는 양방향으로 v1, v2 노드에 서로의 노드를 같이 저장하여 정답을 잘못 출력한 것이었다. 이 조건을 맞추고 다시 제출하니 정답 판정을 받았다!
코드
오답 코드 (오답 요인: 양방향)
from sys import stdin
from heapq import heappush, heappop
input = stdin.readline
def get_trace(path, e):
trace = []
curr = e
while curr != -1:
trace.append(curr)
curr = path[curr]
return trace[::-1]
def dijkstra(s, e):
INF = float('inf')
dist = [INF for _ in range(n + 1)]
path = [-1 for _ in range(n + 1)]
dist[s] = 0
pq = [(0, s)]
while pq:
min_dist, cur_v = heappop(pq)
if min_dist != dist[cur_v]:
continue
if cur_v == e:
break
for nxt_v, nxt_dist in vertex[cur_v]:
new_dist = min_dist + nxt_dist
if new_dist < dist[nxt_v]:
path[nxt_v] = cur_v
dist[nxt_v] = new_dist
heappush(pq, (new_dist, nxt_v))
trace = get_trace(path, e)
return dist[e], trace
n = int(input().rstrip())
m = int(input().rstrip())
vertex = [[] for _ in range(n + 1)]
for _ in range(m):
v1, v2, t = map(int, input().split()) # v1 <-> v2: 양방향 t
vertex[v1].append((v2, t))
vertex[v2].append((v1, t))
s, e = map(int, input().split())
dist, trace = dijkstra(s, e)
# 정답 출력
print(dist)
print(len(trace))
print(*trace)
정답 코드 (수정 내용: 단방향)
from sys import stdin
from heapq import heappush, heappop
input = stdin.readline
def get_trace(path, e):
trace = []
curr = e
while curr != -1:
trace.append(curr)
curr = path[curr]
return trace[::-1]
def dijkstra(s, e):
INF = float('inf')
dist = [INF for _ in range(n + 1)]
path = [-1 for _ in range(n + 1)]
dist[s] = 0
pq = [(0, s)]
while pq:
min_dist, cur_v = heappop(pq)
if min_dist != dist[cur_v]:
continue
if cur_v == e:
break
for nxt_v, nxt_dist in vertex[cur_v]:
new_dist = min_dist + nxt_dist
if new_dist < dist[nxt_v]:
path[nxt_v] = cur_v
dist[nxt_v] = new_dist
heappush(pq, (new_dist, nxt_v))
trace = get_trace(path, e)
return dist[e], trace
# 입력 부분
n = int(input().rstrip())
m = int(input().rstrip())
# 풀이 부분
vertex = [[] for _ in range(n + 1)]
for _ in range(m):
v1, v2, t = map(int, input().split()) # v1 <-> v2: 양방향 t
vertex[v1].append((v2, t))
s, e = map(int, input().split())
dist, trace = dijkstra(s, e)
# 정답 출력
print(dist)
print(len(trace))
print(*trace)
Reference
함께 풀면 좋은 문제들
꾸준함을 기록하며 성장하는 개발자입니다!