Autoencoder
1. Settings
1) Import required libraries
import numpy as np
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.init as init
import torchvision.datasets as dset
import torchvision.transforms as transforms
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
import matplotlib as mpl2) Set hyperparameters
batch_size = 256
learning_rate = 0.0002
num_epochs = 102. Data
1) Download Data
mnist_train = dset.MNIST("./", train=True, transform=transforms.ToTensor(), target_transform=None, download=True)
mnist_test = dset.MNIST("./", train=False, transform=transforms.ToTensor(), target_transform=None, download=True)
mnist_train, mnist_val = torch.utils.data.random_split(mnist_train, [50000, 10000])mnist_train[0][0].size() # (1, 28, 28) # (channel, height, width)torch.Size([1, 28, 28])mnist_train[0][1] # label62) Set DataLoader
dataloaders = {}
dataloaders['train'] = DataLoader(mnist_train, batch_size=batch_size, shuffle=True)
dataloaders['val'] = DataLoader(mnist_val, batch_size=batch_size, shuffle=False)
dataloaders['test'] = DataLoader(mnist_test, batch_size=batch_size, shuffle=False)dataloaders.keys()dict_keys(['train', 'val', 'test'])len(dataloaders["train"])1963. Model & Optimizer
1) Model
# build your own autoencoder
# in my case: 784(1*28*28) -> 100 -> 30 -> 100 -> 784(28*28)
class Autoencoder(nn.Module):
def __init__(self):
super(Autoencoder,self).__init__()
self.encoder = nn.Sequential(
nn.Linear(28*28, 100), # 여기에 CNN 등 다른 layer를 써도 된다.
nn.ReLU(), # activation function
nn.Linear(100, 30),
nn.ReLU() # activation function
)
self.decoder = nn.Sequential(
nn.Linear(30, 100),
nn.ReLU(), # activation function
nn.Linear(100, 28*28),
nn.Sigmoid() # activation function
)
def forward(self, x): # x: (batch_size, 1, 28, 28)
batch_size = x.size(0)
x = x.view(-1, 28*28) # reshape to 784(28*28)-dimensional vector
encoded = self.encoder(x) # hidden vector
out = self.decoder(encoded).view(batch_size, 1, 28, 28) # final output. resize to input's size
return out, encoded
Linear layer는 오직 마지막 element(784)에만 적용된다. 그래서 Autoencoder의 앞 단계에서는 batch size를 고려하지 않아도 된다.
model을 train하거나 validate할 때 batch-wise operation을 한다.
x = (B, C, W, H)
x.view(-1, W*H) => x.shape == (B*C, W*H)
x.view(B, -1, W, H) => x.shape == (B, C, W, H)
MNIST dataset에 있는 tensor의 모든 element가 0과 1사이에 있기 때문에 output space를 (0,1)로 제한하기 위해서 마지막에 sigmoid non-linearity function을 쓴다.
(mnist_train[1][0] <= 1).sum()tensor(784)Reshape function과 view function의 차이점
locating memory issue이다. 두 function은 비슷하게 동작하지만, function이 contiguous = True tensors로 적용될 수 있는가의 여부에 차이점이 있다.
Contiguous
Tensor의 각 element가 컴퓨터 메모리에 할당될때 메모리 주소가 이전 주소의 바로 다음이라는 것이다.
1,2,3,4 : contiguous
1,(2),3,(4),5,(6),7 : not-contiguous
2) Loss func & Optimizer
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print(device)cuda:0model = Autoencoder().to(device)
loss_func = nn.MSELoss()
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)4. Train
import time
import copy
def train_model(model, dataloaders, criterion, optimizer, num_epochs=10):
"""
model: model to train
dataloaders: train, val, test data's loader
criterion: loss function
optimizer: optimizer to update your model
"""
since = time.time()
train_loss_history = []
val_loss_history = []
best_model_wts = copy.deepcopy(model.state_dict())
best_val_loss = 100000000
for epoch in range(num_epochs):
print('Epoch {}/{}'.format(epoch, num_epochs - 1))
print('-' * 10)
# Each epoch has a training and validation phase
for phase in ['train', 'val']:
if phase == 'train':
model.train() # Set model to training mode
else:
model.eval() # Set model to evaluate mode
running_loss = 0.0
# Iterate over data.
for inputs, labels in dataloaders[phase]:
inputs = inputs.to(device) # transfer inputs to GPU
# zero the parameter gradients
optimizer.zero_grad()
# forward
# track history if only in train
with torch.set_grad_enabled(phase == 'train'):
outputs, encoded = model(inputs)
loss = criterion(outputs, inputs) # calculate a loss
# backward + optimize only if in training phase
if phase == 'train':
loss.backward() # perform back-propagation from the loss
optimizer.step() # perform gradient descent with given optimizer
# statistics
running_loss += loss.item() * inputs.size(0)
epoch_loss = running_loss / len(dataloaders[phase].dataset)
print('{} Loss: {:.4f}'.format(phase, epoch_loss))
# deep copy the model
if phase == 'train':
train_loss_history.append(epoch_loss)
if phase == 'val':
val_loss_history.append(epoch_loss)
if phase == 'val' and epoch_loss < best_val_loss:
best_val_loss = epoch_loss
best_model_wts = copy.deepcopy(model.state_dict())
print()
time_elapsed = time.time() - since
print('Training complete in {:.0f}m {:.0f}s'.format(time_elapsed // 60, time_elapsed % 60))
print('Best val Loss: {:4f}'.format(best_val_loss))
# load best model weights
model.load_state_dict(best_model_wts)
return model, train_loss_history, val_loss_historybest_model, train_loss_history, val_loss_history = train_model(model, dataloaders, loss_func, optimizer, num_epochs=num_epochs)Epoch 0/9
----------
train Loss: 0.1174
val Loss: 0.0700
Epoch 1/9
----------
train Loss: 0.0647
val Loss: 0.0588
Epoch 2/9
----------
train Loss: 0.0541
val Loss: 0.0481
Epoch 3/9
----------
train Loss: 0.0435
val Loss: 0.0404
Epoch 4/9
----------
train Loss: 0.0391
val Loss: 0.0369
Epoch 5/9
----------
train Loss: 0.0353
val Loss: 0.0333
Epoch 6/9
----------
train Loss: 0.0319
val Loss: 0.0302
Epoch 7/9
----------
train Loss: 0.0293
val Loss: 0.0280
Epoch 8/9
----------
train Loss: 0.0274
val Loss: 0.0264
Epoch 9/9
----------
train Loss: 0.0258
val Loss: 0.0248
Training complete in 1m 15s
Best val Loss: 0.024841# Let's draw a learning curve like below.
plt.plot(train_loss_history, label='train')
plt.plot(val_loss_history, label='val')
plt.xlabel('epoch')
plt.ylabel('loss')
plt.legend()
plt.show()
# overfitting이 보이지 않는다.
# 9 epoch으로는 완전하게 훈련하기 충분하지 않다는 것을 알 수 있다.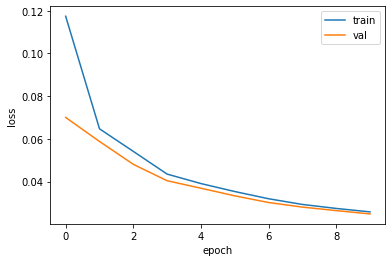
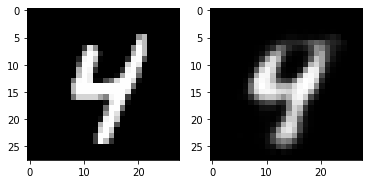
5. Check with Test Image
with torch.no_grad():
running_loss = 0.0
for inputs, labels in dataloaders["test"]:
inputs = inputs.to(device)
outputs, encoded = best_model(inputs)
test_loss = loss_func(outputs, inputs)
running_loss += test_loss.item() * inputs.size(0)
test_loss = running_loss / len(dataloaders["test"].dataset)
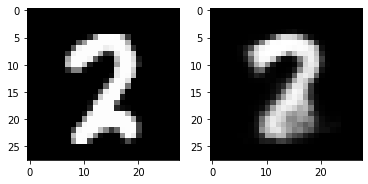
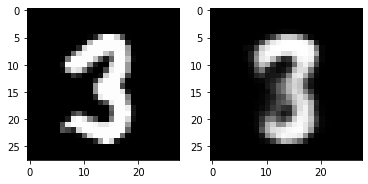
print(test_loss) 0.02449837400317192out_img = torch.squeeze(outputs.cpu().data)
print(out_img.size())
for i in range(5):
plt.subplot(1,2,1)
plt.imshow(torch.squeeze(inputs[i]).cpu().numpy(),cmap='gray')
plt.subplot(1,2,2)
plt.imshow(out_img[i].numpy(),cmap='gray')
plt.show()torch.Size([16, 28, 28])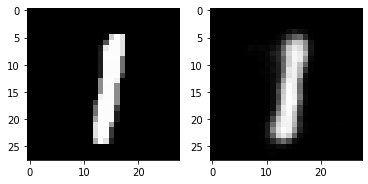
6. Visualizing MNIST
np.random.seed(42)
from sklearn.manifold import TSNEtest_dataset_array = mnist_test.data.numpy() / 255
test_dataset_array = np.float32(test_dataset_array)
labels = mnist_test.targets.numpy()test_dataset_array = torch.tensor(test_dataset_array)
inputs = test_dataset_array.to(device)
outputs, encoded = best_model(inputs)encoded = encoded.cpu().detach().numpy()
tsne = TSNE()
X_test_2D = tsne.fit_transform(encoded)
X_test_2D = (X_test_2D - X_test_2D.min()) / (X_test_2D.max() - X_test_2D.min())plt.scatter(X_test_2D[:, 0], X_test_2D[:, 1], c=labels, s=10, cmap="tab10")
plt.axis("off")
plt.show()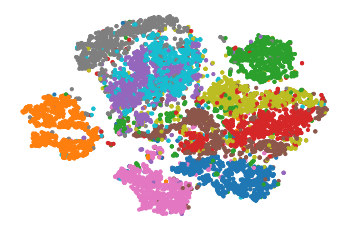
Let's make this diagram a bit prettier:
# adapted from https://scikit-learn.org/stable/auto_examples/manifold/plot_lle_digits.html
plt.figure(figsize=(10, 8))
cmap = plt.cm.tab10
plt.scatter(X_test_2D[:, 0], X_test_2D[:, 1], c=labels, s=10, cmap=cmap)
image_positions = np.array([[1., 1.]])
for index, position in enumerate(X_test_2D):
dist = np.sum((position - image_positions) ** 2, axis=1)
if np.min(dist) > 0.02: # if far enough from other images
image_positions = np.r_[image_positions, [position]]
imagebox = mpl.offsetbox.AnnotationBbox(
mpl.offsetbox.OffsetImage(torch.squeeze(inputs).cpu().numpy()[index], cmap="binary"),
position, bboxprops={"edgecolor": cmap(labels[index]), "lw": 2})
plt.gca().add_artist(imagebox)
plt.axis("off")
plt.show()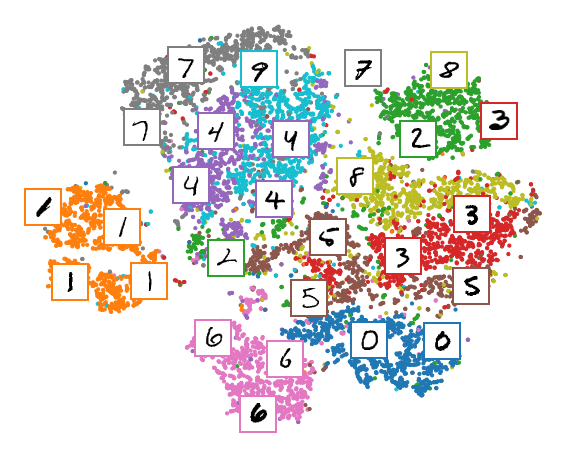
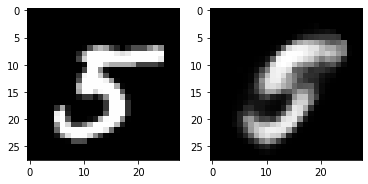
Denoising Autoencoder
model_D = Autoencoder().to(device)
loss_func = nn.MSELoss()
optimizer = torch.optim.Adam(model_D.parameters(), lr=learning_rate)# It's all the same except for one: adding noise to inputs
# copy train_model() code and just add 'noise part'
# Hint: You can make noise like this.
# noise = torch.zeros(inputs.size(0), 1, 28, 28)
# nn.init.normal_(noise, 0, 0.1)
def train_model_D(model, dataloaders, criterion, optimizer, num_epochs=10):
"""
model: model to train
dataloaders: train, val, test data's loader
criterion: loss function
optimizer: optimizer to update your model
"""
since = time.time()
train_loss_history = []
val_loss_history = []
best_model_wts = copy.deepcopy(model.state_dict())
best_val_loss = 100000000
for epoch in range(num_epochs):
print('Epoch {}/{}'.format(epoch, num_epochs - 1))
print('-' * 10)
# Each epoch has a training and validation phase
for phase in ['train', 'val']:
if phase == 'train':
model.train() # Set model to training mode
else:
model.eval() # Set model to evaluate mode
running_loss = 0.0
# Iterate over data.
for inputs, labels in dataloaders[phase]:
inputs = inputs.to(device)
noise = torch.zeros(inputs.size(0), 1, 28, 28)
nn.init.normal_(noise, 0, 0.1)
noise = noise.to(device)
noise_inputs = inputs + noise # transfer inputs to GPU
# zero the parameter gradients
optimizer.zero_grad()
# forward
# track history if only in train
with torch.set_grad_enabled(phase == 'train'):
outputs, encoded = model(noise_inputs)
loss = criterion(outputs, inputs) # calculate a loss
# backward + optimize only if in training phase
if phase == 'train':
loss.backward() # perform back-propagation from the loss
optimizer.step() # perform gradient descent with given optimizer
# statistics
running_loss += loss.item() * inputs.size(0)
epoch_loss = running_loss / len(dataloaders[phase].dataset)
print('{} Loss: {:.4f}'.format(phase, epoch_loss))
# deep copy the model
if phase == 'train':
train_loss_history.append(epoch_loss)
if phase == 'val':
val_loss_history.append(epoch_loss)
if phase == 'val' and epoch_loss < best_val_loss:
best_val_loss = epoch_loss
best_model_wts = copy.deepcopy(model.state_dict())
print()
time_elapsed = time.time() - since
print('Training complete in {:.0f}m {:.0f}s'.format(time_elapsed // 60, time_elapsed % 60))
print('Best val Loss: {:4f}'.format(best_val_loss))
# load best model weights
model.load_state_dict(best_model_wts)
return model, train_loss_history, val_loss_historybest_model_D, train_loss_history_D, val_loss_history_D = train_model_D(model_D, dataloaders, loss_func, optimizer, num_epochs=num_epochs)Epoch 0/9
----------
train Loss: 0.1125
val Loss: 0.0696
Epoch 1/9
----------
train Loss: 0.0646
val Loss: 0.0593
Epoch 2/9
----------
train Loss: 0.0544
val Loss: 0.0482
Epoch 3/9
----------
train Loss: 0.0439
val Loss: 0.0405
Epoch 4/9
----------
train Loss: 0.0392
val Loss: 0.0373
Epoch 5/9
----------
train Loss: 0.0357
val Loss: 0.0335
Epoch 6/9
----------
train Loss: 0.0321
val Loss: 0.0304
Epoch 7/9
----------
train Loss: 0.0293
val Loss: 0.0280
Epoch 8/9
----------
train Loss: 0.0269
val Loss: 0.0257
Epoch 9/9
----------
train Loss: 0.0250
val Loss: 0.0240
Training complete in 1m 19s
Best val Loss: 0.024009plt.plot(train_loss_history_D, label='train')
plt.plot(val_loss_history_D, label='val')
plt.xlabel('epoch')
plt.ylabel('loss')
plt.legend()
plt.show()
# 모델이 아직 충분히 train되지 않았다는 것을 의미한다.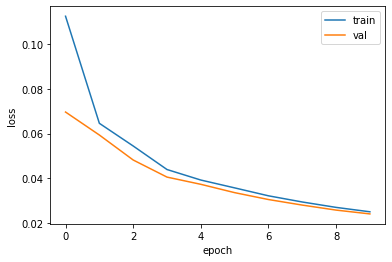
with torch.no_grad():
running_loss = 0.0
for inputs, labels in dataloaders['test']:
noise = nn.init.normal_(torch.FloatTensor(inputs.size(0), 1, 28, 28), 0, 0.1)
noise = noise.to(device)
inputs = inputs.to(device)
noise_inputs = inputs + noise
outputs, encoded = best_model_D(noise_inputs)
test_loss = loss_func(outputs, inputs)
running_loss += test_loss.item()* inputs.size(0)
test_loss = running_loss / len(dataloaders['test'].dataset)
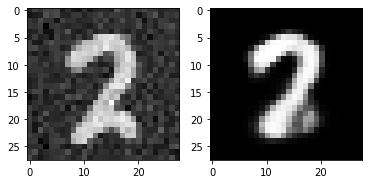
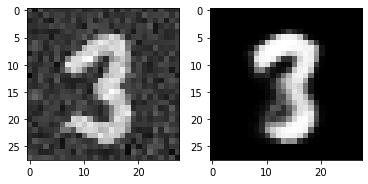
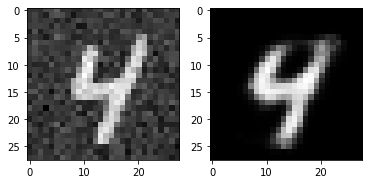
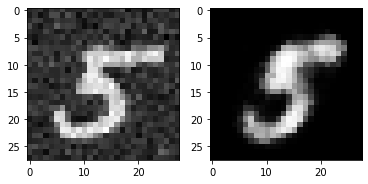
print(test_loss) 0.023626958617568018out_img = torch.squeeze(outputs.cpu().data)
print(out_img.size())
for i in range(5):
plt.subplot(1,2,1)
plt.imshow(torch.squeeze(noise_inputs[i]).cpu().numpy(),cmap='gray')
plt.subplot(1,2,2)
plt.imshow(out_img[i].numpy(),cmap='gray')
plt.show()torch.Size([16, 28, 28])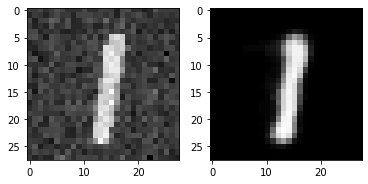
Reference
- AI504: Programming for AI Lecture at KAIST AI

AI researcher