객체 검출을 진행하는 AI 모델에는 2가지의 방법이 있다.
<1-stage detector, 2-stage detector>
1-stage 방식의 대표적인 모델은 YOLO 시리즈와 Retina-Net, SSD 등이 있다.
1-stage 방식이란 Regional Proposal과 Classification이 CNN을 통해 동시에 이루어지는 방식으로 Convolution Layer을 통해 Feature Maps가 생성되면 Output으로 Multi-Class Classification과 Bounding Box Regression을 출력한다.
위 방식의 구조는 Anchor Boxes(앵커 박스)를 찾게되는데 Anchor box란 중심 좌표를 기준으로 여러 크기와 비율을 가지고 생성된 영역이다.
돌아와 YOLO 시리즈에서 loss값을 계산하여 학습시키는 모듈은 ultralytics/nn/tasks.py 으로 해당 모듈은 기본적으로 다른 Detection, Segmentation, Poss 등의 작업에 대한 기초 클래스 역할을 하는 BaseModel이 있다.
class BaseModel 은 모델의 기초로서 YOLOv8의 공통적인 레이어 구성과 파라미터 초기화를 초기화하여 이후에 이를 상속받는 모델들에 있어 기초 토대를 만들어준다.
기초 토대를 구성해 준다는 것은 손실 값 계산, 모델의 가중치 로드, 순방향 패스의 수행에 있어 입력값과 출력값 그 사이에 필요한 파라미터(특성 맵을 저장할지에 대한 여부)등 이 있다.
class DetectionModel(BaseModel)
# Define model
ch = self.yaml["ch"] = self.yaml.get("ch", ch) # input channels
if nc and nc != self.yaml["nc"]:
LOGGER.info(f"Overriding model.yaml nc={self.yaml['nc']} with nc={nc}")
self.yaml["nc"] = nc # override YAML value
self.model, self.save = parse_model(deepcopy(self.yaml), ch=ch, verbose=verbose) # model, savelist
self.names = {i: f"{i}" for i in range(self.yaml["nc"])} # default names dict
self.inplace = self.yaml.get("inplace", True)
self.end2end = getattr(self.model[-1], "end2end", False)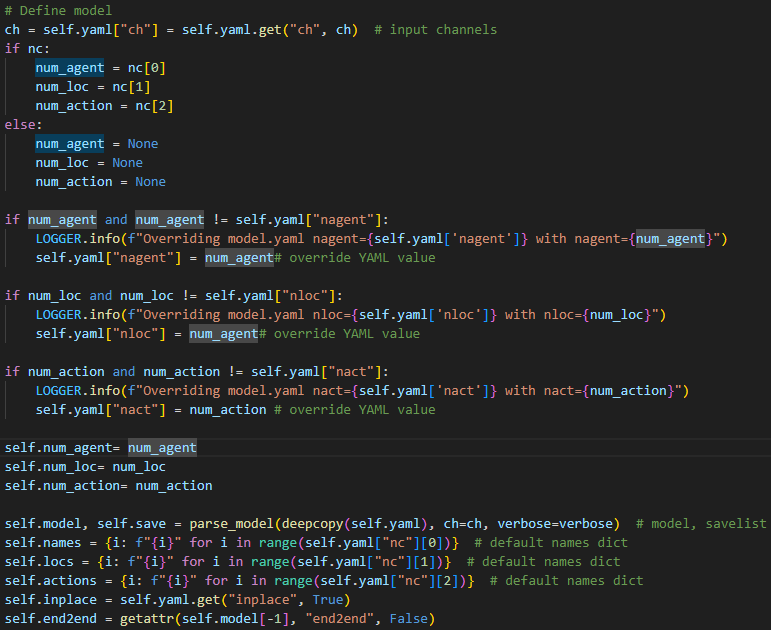
def loss(self, batch, preds=None):
"""
Compute the loss for the given batch of data.
Args:
batch (dict): Dictionary containing image and label data.
preds (torch.Tensor, optional): Precomputed model predictions. Defaults to None.
Returns:
(tuple): A tuple containing the total loss and main three losses in a tensor.
"""
if not hasattr(self, "criterion"):
self.criterion = self.init_criterion()
img = batch["img"]
# NOTE: preprocess gt_bbox and gt_labels to list.
bs = len(img)
batch_idx = batch["batch_idx"]
gt_groups = [(batch_idx == i).sum().item() for i in range(bs)]
targets = {
"cls": batch["cls"].to(img.device, dtype=torch.long).view(-1),
"loc": batch["loc"].to(img.device, dtype=torch.long).view(-1),
"action": batch["action"].to(img.device, dtype=torch.long).view(-1),
"bboxes": batch["bboxes"].to(device=img.device),
"batch_idx": batch_idx.to(img.device, dtype=torch.long).view(-1),
"gt_groups": gt_groups,
}
preds = self.predict(img, batch=targets) if preds is None else preds
dec_bboxes, dec_scores, enc_bboxes, enc_scores, dn_meta = preds if self.training else preds[1]
if dn_meta is None:
dn_bboxes, dn_scores = None, None
else:
dn_bboxes, dec_bboxes = torch.split(dec_bboxes, dn_meta["dn_num_split"], dim=2)
dn_scores, dec_scores = torch.split(dec_scores, dn_meta["dn_num_split"], dim=2)
dec_bboxes = torch.cat([enc_bboxes.unsqueeze(0), dec_bboxes]) # (7, bs, 300, 4)
dec_scores = torch.cat([enc_scores.unsqueeze(0), dec_scores])
loss = self.criterion(
(dec_bboxes, dec_scores), targets, dn_bboxes=dn_bboxes, dn_scores=dn_scores, dn_meta=dn_meta
)
# NOTE: There are like 12 losses in RTDETR, backward with all losses but only show the main three losses.
return sum(loss.values()), torch.as_tensor(
[loss[k].detach() for k in ["loss_giou", "loss_class", "loss_bbox"]], device=img.device
)ultralytics/models/yolo/detect/train.py, val.py, predict.py
해당 모듈에서는 모델이 학습할 때 쓰이는 loss값이 어떻게 설정되고 계산하는지 포함.
손실 항목은 self.loss_names에 저장.
self.loss_names = "box_loss", "cls_loss", "dfl_loss"
https://github.com/kCW-tb/complex_detection/blob/main/ultralytics/models/yolo/detect/train.py
