1. Control이란
제어(Control)는 시스템의 상태를 원하는 목표치로 도달시키는 과정이다.
제어에서는 1. Performance와 2. Stability를 중점으로 본다. Performance는 시스템의 상태가 목표치에 부합한 정도이고, Stability는 시스템에 외란이 가해져도 발산하지 않는 것이다.
2. 피드백 제어기, PID 제어기
피드백 제어기란 입력에 대해 특정 프로세스를 거친 출력이 다시 입력에 영향을 미치고 이것이 다시 프로세스로 들어가 출력을 내는 반복적인 제어 방식이다. 출력이 목표값에 도달하기 위해 어떻게 되어야 하는지 피드백을 한다고 이해하면 된다.
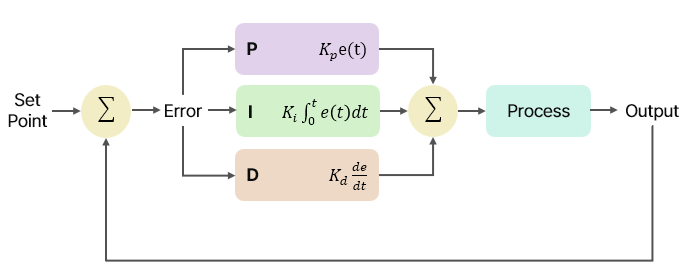
PID(Proportional-Integration-Differential controller)는 피드백 제어기의 형태를 갖는다.
제어 대상의 출력을 측정해 원하는 설정값(set value)와 비교하여 오차를 계산한다. 그리고 제어에 필요한 제어량을 도출된 오차값을 통해 계산한다.
-
: 편차에 비례. 현재 상태에서 편차의 크기에 비례해 제어 작용 함
-
: 오차값의 적분에 비례. 정상 상태(steady-state)의 오차를 없앰
-
: 오차값의 미분에 비례. 출력값의 급격한 변화 막아서 오버슈트 줄이면서 안정성 향상시킨다.
-
: 제어량-목표값 → 편차
는 Gain(이득값)이다. 각각 비례 제어, 적분 제어, 편차 제어를 조절하는 계수가 된다.
비례항만 가질 땐 P 제어기, 비례-미분항만 가질 땐 PD 제어기.. 등 특정 항만 가질 수도 있다.
제어 매커니즘
P(비례) 제어
제어량과 목표값의 차이(편차)에 비례하여 제어하는 방법이다.
편차가 크면 조작량을 크게 하고, 편차가 작으면 조작량을 작게 하여 제어량을 목표값에 유연하게 도달시킨다.
