self-driving
1.[논문리뷰] YOLOv4: Optimal Speed and Accuracy of Object Detection
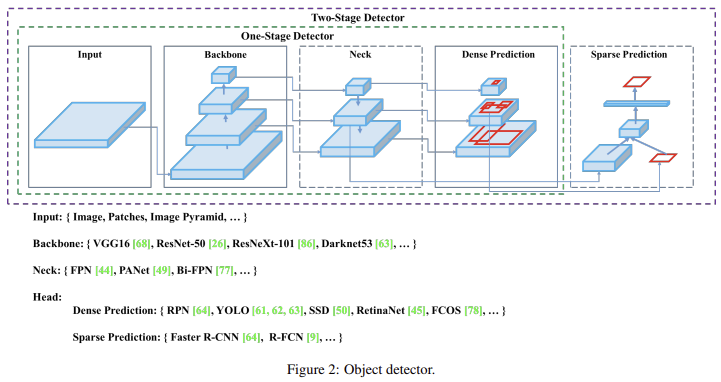
논문 링크: https://arxiv.org/abs/2004.10934YOLOv3에 모듈 형식의 추가적인 방법, Loss function 개선, 더 효율적인 학습 방식 적용하여 만든 빠르고 정확한 모델이 YOLOv4이다. 대부분의 CNN 기반 object de
2.YOLO 변화
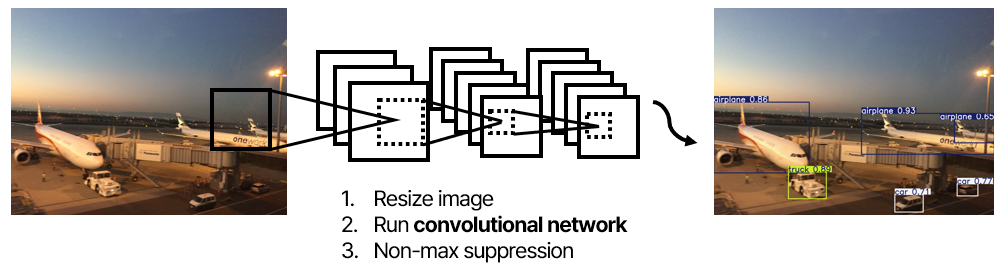
YOLO 이전 모델들은 이미지를 여러 번에 걸쳐 확인해서 이미지를 처리할 때 많은 시간이 걸렸다. 하지만 YOLO는 이미지를 한번 보고도 바로 객체를 검출할 수 있어서 실시간으로 빠르게 객체를 탐지할 수 있다. 2020년 6월에 발표되었고 paper 없이 코드만 공개되
3.Time to Collision (TTC)
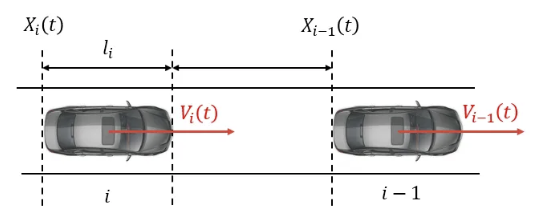
(Time to Collision) TTC는 차량이 충돌하는 데까지 걸리는 시간이다. $$TTC = \\frac{RelativeDistance}{RelativeSpeed} = \\frac{X{i-1}-X_i-l_i}{V{i-1}-V_i} X: 차량 위치V: 차량 속도t
4.Ultra Fast Lane Detection (UFLD) TensorRT 변환
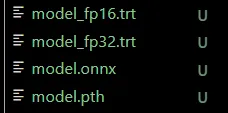
TensorRT로 변환할 때 .pt → .onnx → .trt or .engine을 거쳐서 변환됩니다. 아래 링크 클론 해주세요! https://github.com/KopiSoftware/TRT_Ultra_Fast_Lane_Detect?tab=readme-ov
5.YOLOv8 custom 학습
roboflow에서 라벨링함Download Dataset 누르고 → Format: YOLOv8, Show download code 선택 주피터 코드 실행하면 데이터셋 다운로드됨 data.yaml 열어서 train이랑 test에 경로 맞게 넣기1\. validation
6.YOLOv8 video

7.Camera Calibration
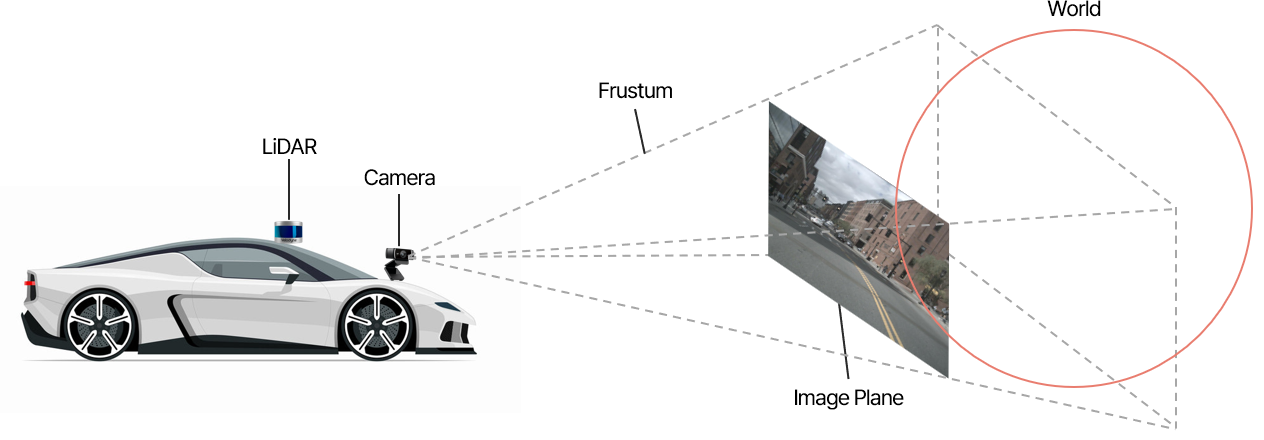
Preliminary 세상은 3차원인데 카메라나 우리 눈은 2차원 평면으로 보이게 만든다. 카메라 움직일 때 화면이 달라지는 이유는 Camera Extrinsics가 변하기 때문이다. zoom in/out 할 때 화면이 달라지는 이유는 Camera Intrins
8.A* 알고리즘
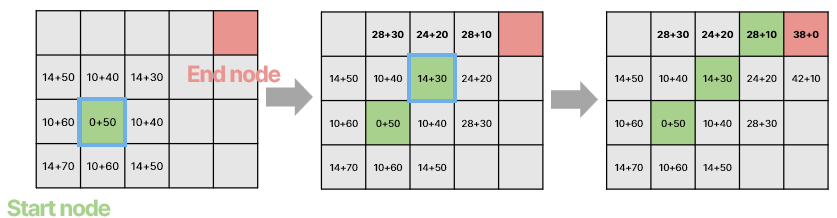
A\* 알고리즘은 출발 노드부터 목표 노드까지 가는 최단 경로 찾는 그래프 탐색 알고리즘 중 하나이다. Dijkstra algorithm과 유사하지만, 목표 노드까지의 휴리스틱 거리 측정값인 h(n)도 사용한다는 점에서 다르다. 가장 작은 비용 갖는 사각형끼리 서로 이
9.PID 제어기
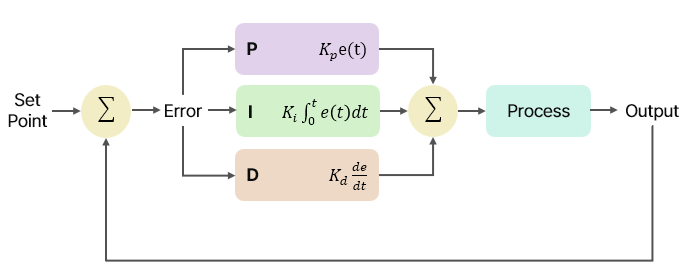
제어(Control)는 시스템의 상태를 원하는 목표치로 도달시키는 과정이다. 제어에서는 1. Performance와 2. Stability를 중점으로 본다. Performance는 시스템의 상태가 목표치에 부합한 정도이고, Stability는 시스템에 외란이 가해져도