3DGS 실행하려면 input으로 image와 그 이미지에 대한 camera parameter가 필요하다. 보통 COLMAP과 같은 알고리즘으로 SfM 과정을 거쳐서 카메라 파라미터(내부+외부)를 얻는다.
polycam으로 촬영하면 이미지와 카메라 파라미터가 기록되기 때문에 SfM을 안거쳐도 된다.
iphone 13 pro를 사용했다. 프로에 lidar 센서가 있어서 프로로 촬영해야 한다. (+polycam 유료다)
찍고 raw data로 다운받으면 아래와 같이 파일이 저장된다.
cameras 열어보면 각 이미지마다의 카메라 intrinsics, extrinsics가 저장된걸 볼 수 있다.
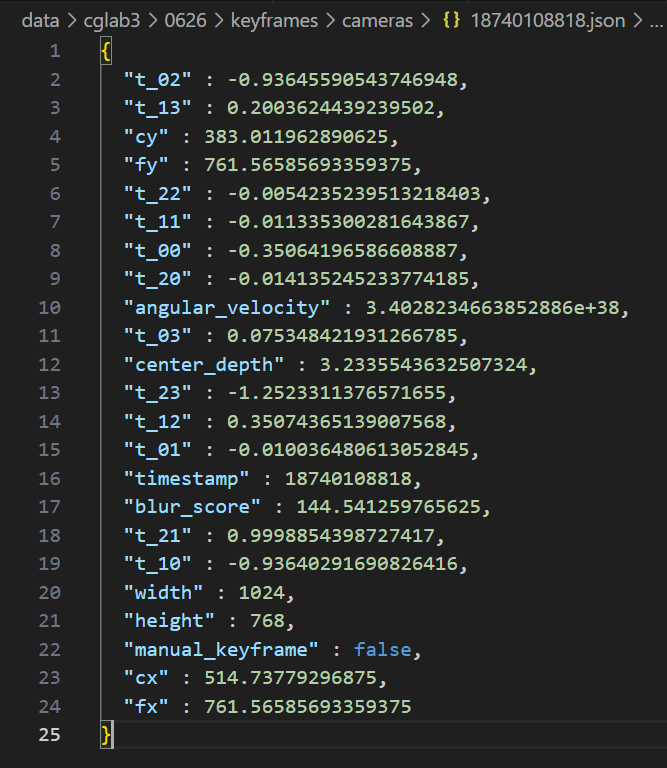
1. Intrinsics
- cx: 카메라 주점(x축 중심) - 이미지 중심의 x 좌표
- cy: 카메라 주점(y축 중심) - 이미지 중심의 y 좌표
- fx: 초점거리(x 방향)
- fy: 초점거리(y 방향)
- width: 이미지 너비 (pixel)
- height: 이미지 높이 (pixel)
이렇게 카메라 instrinsics K가 완성된다.
2. Extrinsics
- t_00 ~ t_22: Rotation matrix (R)
- world → camera rotation (3x3) matrix - t_03 ~ t_23: Translation vector
- world → camera의 위치
이렇게해서 전체 projection 행렬:
이 완성된다.
근데 지금 각 이미지마다 camera parameter json 파일이 대응해서 저장돼 있는데 모든 카메라 파라미터 정보를 담은 하나의 json 파일이 필요하다.
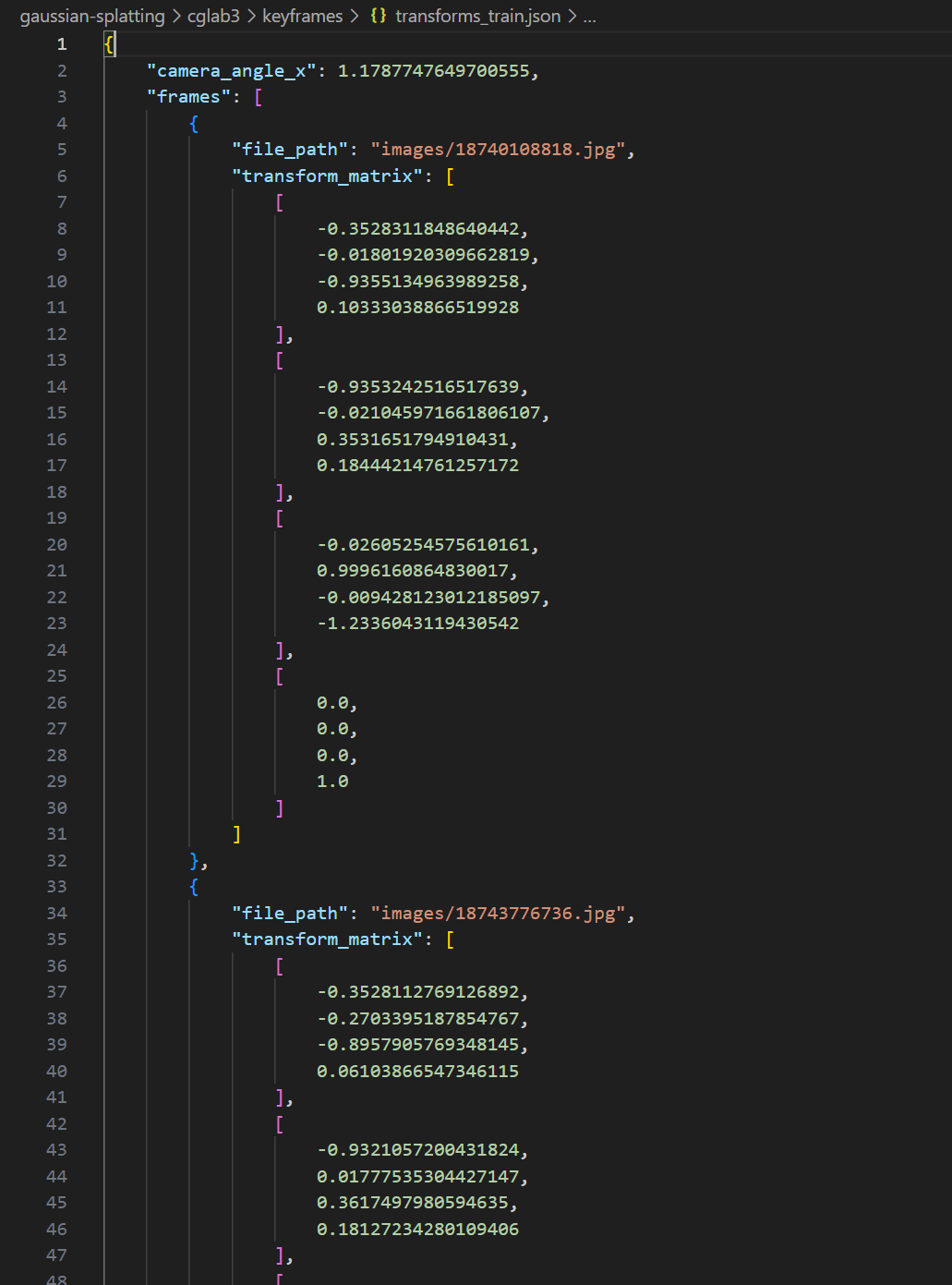
이렇게 만들어주고 파일명 transforms_train.json으로 해줘야한다.
import os
import json
import math
image_dir = "keyframes/images"
camera_dir = "keyframes/cameras"
output_path = "keyframes/transforms.json"
def load_camera_json(path):
with open(path, 'r') as f:
return json.load(f)
def build_transform_matrix(cam):
return [
[cam["t_00"], cam["t_01"], cam["t_02"], cam["t_03"]],
[cam["t_10"], cam["t_11"], cam["t_12"], cam["t_13"]],
[cam["t_20"], cam["t_21"], cam["t_22"], cam["t_23"]],
[0.0, 0.0, 0.0, 1.0]
]
def compute_camera_angle_x(cam):
fx = cam["fx"]
width = cam["width"]
return 2 * math.atan(0.5 * width / fx)
frames = []
camera_angle_x = None
for fname in sorted(os.listdir(camera_dir)):
if not fname.endswith(".json"):
continue
stem = fname.replace(".json", "")
cam_path = os.path.join(camera_dir, fname)
img_path = os.path.join(image_dir, stem + ".jpg")
if not os.path.exists(img_path):
print(f"이미지 없음: {img_path}")
continue
cam_data = load_camera_json(cam_path)
transform_matrix = build_transform_matrix(cam_data)
if camera_angle_x is None:
camera_angle_x = compute_camera_angle_x(cam_data)
frames.append({
"file_path": f"images/{stem}.jpg",
"transform_matrix": transform_matrix
})
output = {
"camera_angle_x": camera_angle_x,
"frames": frames
}
with open(output_path, "w") as f:
json.dump(output, f, indent=4)
print(f"transforms.json 생성 완료 총 {len(frames)}개 프레임")이제 데이터 다 얻었으니 학습시키면 된다.

잉공지능