3D
1.Mini-Splatting: Representing Scenes with a Constrained Number of Gaussians
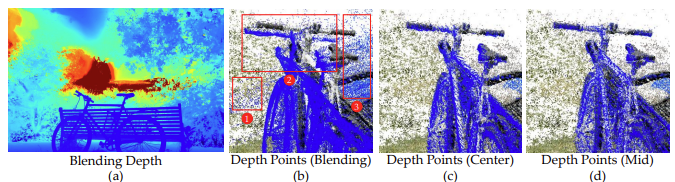
📌link: https://arxiv.org/abs/2403.14166methodology 부분만 우선 정리 densification & simplification → reorganizing the spatial distribution of Gaussians
2.Light Gaussian: Unbounded 3D Gaussian Compression with 15x Reduction and 200+ FPS
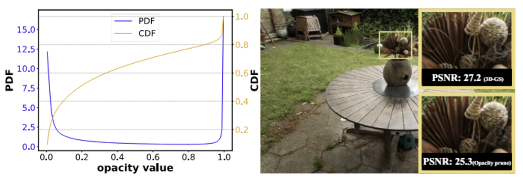
📌: https://arxiv.org/abs/2311.17245methods 위주로 리뷰LightGaussian은 3D Gaussian Splatting의 저장 공간 문제를 해결하기 위해 개발된 새로운 기술이다. 불필요한 가우시안 제거효율적인 형태로 전환해서
3.3DGS 기본 개념
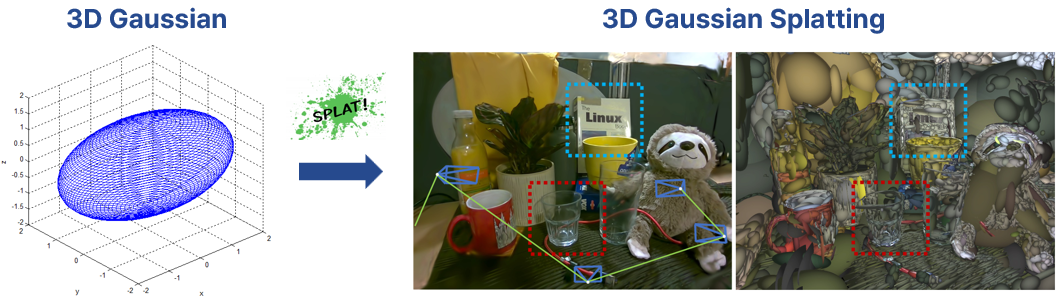
: novel-view synthesis of scenes captured with multiple photos or videos이미지가 camera pose와 함께 주어졌을 때 주어지지 않은 camera pose에 대한 이미지 합성1D Gaussian$$g(x) =
4.3D Gaussian Splatting for Real-Time Radiance Field Rendering 리뷰
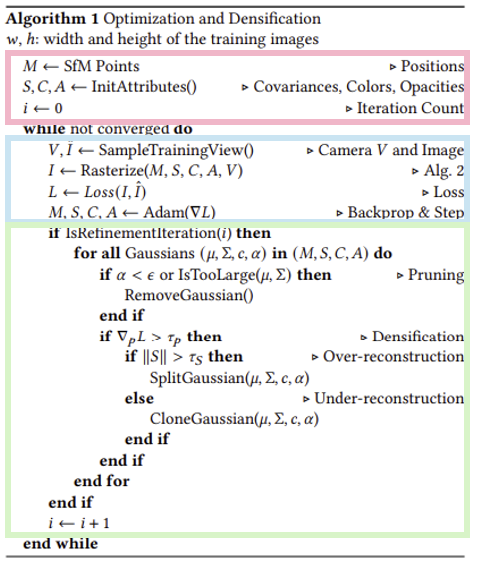
3DGS특징Sparse set of SfM(Structure from Motion) points가 input으로 들어간다. Explicit scene representation → Optimization of 3D Gaussian position, opacity,
5.3DGS convert.py 오류 해결

convert.py는 COLMAP을 자동으로 실행하고, 그 결과(=카메라 pose, 이미지)를 3DGS 학습에 맞게 변환해주는 스크립트이다. convert.py는 SfM, Undistortion으로 이루어져 있는데 아래 오류는 SfM 과정 중에서 Initializati
6.DIFIX3D+: Improving 3D Reconstructions with Single-Step Diffusion Models 리뷰
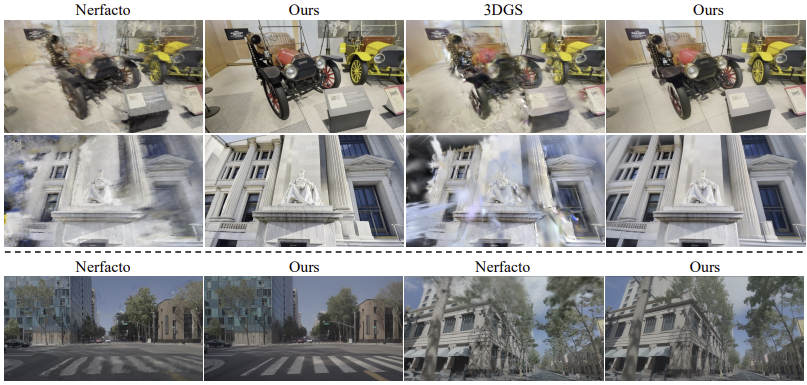
DIFIX3D+: Improving 3D Reconstructions with Single-Step Diffusion Modelsproject pagepaperDIFIX3D+: 2D single step diffusion 모델로 NeRF와 3DGS의 artifact를
7.polycam으로 3DGS

3DGS 실행하려면 input으로 image와 그 이미지에 대한 camera parameter가 필요하다. 보통 COLMAP과 같은 알고리즘으로 SfM 과정을 거쳐서 카메라 파라미터(내부+외부)를 얻는다. polycam으로 촬영하면 이미지와 카메라 파라미터가 기록되기
8.gaussian opacity fields error 해결

자꾸 submodules/diff-gaussian-rasterization 빌드가 안되는 문제가 있었음 Solutiongaussian-opacity-fields\\submodules\\diff-gaussian-rasterization\\cuda_rasterizer\\f
9.3dgs projection 수식
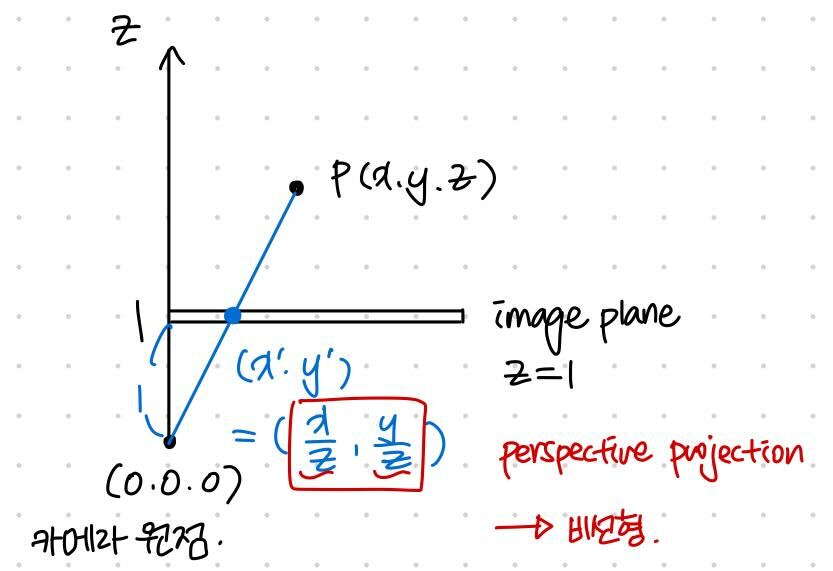
3D gaussian을 2D image plane에 projection하는 과정이다. $$ \\Sigma' = JW \\Sigma W^{T} J^{T}$$Jacobian은 affine projection할 때 쓰는 행렬이다. 일단 affine projection이 뭔지