
📕 참고: ROS2로 시작하는 로봇 프로그래밍
자유도(DOF,Degree Of Freedom)
자유도는 관절에서 허용되는 독립적인 움직임 방향의 수를 의미한다.
로봇의 자유도는 얼마나 복잡한 작업을 수행할 수 있는지를 나타낸다. 매니퓰레이터가 작업 공간 내에서 임의의 위치에서 임의의 자세를 취하기 위해서는 적어도 6자유도 이상이 필요하다.
-> 3차원 공간에서 위치와 방향을 제어해야하기 때문이다. 위치(x,y,z) + 방향 (roll, pitch, yaw)
매니퓰레이터(Manipulator)
특정 작업을 수행하기 위해 설계된 로봇의 기계적인 팔이다. 주로 물체를 잡고 이동시키거나 특정 작업을 수행한다.
매니퓰레이터는 여러개의 조인트(joint)와 링크(link)로 구성되며, 각 조인트에서의 움직임이 로봇의 자유도를 결정한다.
조인트(Joint, 관절)
링크(강체)와 연결되어 링크가 움직일 수 있도록 하여 로봇의 운동 범위를 정의한다.
Revolute Joint
두 링크를 한 위치에 고정하고 지정한 하나의 축을 기준으로 회전운동이 가능한 관절이다. 한축에서만 회전 가능하기 때문에 1자유도를 가진다.
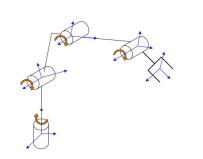
위와 같은 매니퓰레이터는 End-effector를 제외하고 4자유도를 가졌다고 할 수 있다.
💡 End-effector
매니퓰레이터 끝부분에 위치한 도구 또는 장치로, 실제로 작업을 수행하는 부분이다. 로봇 팔은 End-effector를 정확한 위치와 방향으로 이동시키기 위한 구조이다.
링크(Link, 강체)
로봇의 관절과 관절 사이를 연결하는 강체이다.
- 기준 링크(Base Link): 로봇에서 고정된 위치에 있는 링크, 지면이나 로봇 프레임에 연결
- 말단 링크(End-effector Link): 도구나 그리퍼를 장착하는 로봇 말단 링크
- 중간 링크(Intermediate Links): 기준 링크와 말단 링크 사이 모든 링크
💡 AGV(Automated Guided Vehicle)
미리 설정된 경로를 따라 움직이는 로봇 차랑으로, 물체를 한 장소에서 다른 장소로 운송하는 역할을 한다.
💡 AMR(Autonomous Mobile Robot)
자율적으로 환경을 탐색하고 장애물을 회피하며 주어진 작업을 수행하는 로봇이다. 레이저, 카메라 등의 센서로 주변환경을 인식하고 실시간으로 경로 계획 및 수정이 가능하다.
좌표계
매니퓰레이터가 물체 1개를 집어 올린다고 가정하자. 이 때 로봇은 물체까지 떨어진 거리와 End-effector의 방향을 알아야 물체를 집을 수 있다. 따라서, 로봇에게 좌표계는 물체의 위치와 방향을 표시하기 위한 중요한 방법이다.
카르테시안 공간(오일러 각)
일반적인 좌표계로, 현실세계에서 x,y 좌표를 표현할 때 사용한다. 방향은 플레밍의 오른손법칙에 의해 정해진다. 일반적으로 반시계방향을 정방향(+)이라고 표현한다.
쿼터니언 공간
3차원 공간에서 회전을 표현하기 위해 가상의 축을 더해 4개의 축과 각도로 회전을 표현한다. 쿼터니언을 사용하면 오일러 각에서 발생하는 짐벌락(Gimbal Lock)문제를 피할 수 있다.
💡 짐벌락(Gimbal Lock)
특정 각도에서 Z축과 X 또는 Y축이 일치하면, 일치된 축은 자유도가 상실된다.
| 특성 | 카르테시안 공간 | 쿼터니언 공간 |
|---|---|---|
| 위치 표현 | 직교 좌표계 (x, y, z) | 네 개의 성분 (w, x, y, z) |
| 회전 표현 | 회전 행렬 또는 오일러 각 사용 | 효율적인 회전 표현 |
| 계산 복잡성 | 회전 변환 복잡 (gimbal lock 문제) | 계산 효율적 및 간단 |
| 응용 분야 | 로봇 팔 위치 및 경로 계획 | 3D 회전, 자세 제어 |
로봇 프레임
로봇 프레임은 로봇의 각 부분(조인트,링크, 엔드 이펙터 등)을 고유한 기준과 축을 가진 특정 좌표계 기반으로 정의한 것으로, 로봇의 동작을 수학적으로 모델링해준다. 로봇의 규격, 좌표계와 같다고 할 수 있다.
- 월드 좌표계 : 로봇이 작업하는 환경을 기준으로 설정된 좌표계
- 베이스 좌표계: 로봇의 고정된 첫번째 링크 기준으로 설정된 좌표계
- 조인트 좌표계: 로봇의 관절에 따라 설정된 좌표계
- 툴 좌표계: 로봇 말단 장치에 설정된 좌표계로 로봇이 수행하는 도구나 그리퍼의 위치와 방향을 기준으로 정의
작업공간(Workspace)
작업공간은 매니퓰레이터 끝단(End-effector)이 도달할 수 있는 모든 위치를 의미힌다.
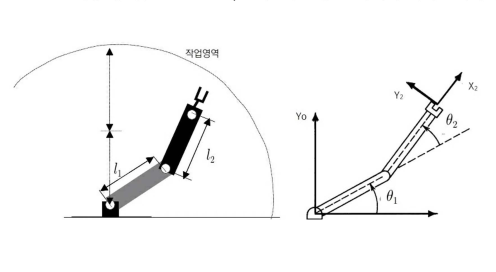
로봇 구조를 설계할 때 작업공간을 고려하여 조인트의 배치와 링크의 길이를 결정하게 된다. 또한, 로봇이 인간이나 다른 로봇과 충돌하지 않도록 하는데 필수적인 공간이다.
D-H 파라미터 (Denavit & Hartenberg Parameter)
로봇의 관절과 링크 간 상대적 위치와 방향을 수학적으로 모델링하기 위해 사용된다.

4개의 매개변수로 로봇의 기구학적 모델을 구성한다.
| 매개변수 | 설명 |
|---|---|
| θ (Theta) | 각 조인트의 회전 각도 각도 |
| d (Distance) | 두 링크 간의 직선 거리 |
| a (Link Length) | 링크의 길이, 이전 링크 Z축에서 현재 링크 Z축까지의 수평거리 |
| α (Alpha) | 링크의 상대적인 방향, 이전 링크 Z축과 현재 링크 Z축간의 회전각도 |
주로 d,α 는 고정이다.(축 간에 틀어지는 경우가 많지 않다.)
로봇 기구학
로봇의 위치, 동작속도, 가속도 등을 통해 로봇의 운동 경로를 파악하는 학문이다.
순기구학(FK, Forward Kinematics)
순기구학은 로봇의 조인트의 위치와 각도를 통해, 엔드 이펙터의 위치와 방향을 계산하는 과정을 다룬다.
로봇이 정확한 위치와 경로로 가고 있는지(Path Planning) 제어 목적으로 사용된다.
역기구학(IK, Inverse Kinematics)
로봇을 원하는 위치로 이동시켜야 하는 경우, 로봇의 조인트 위치와 각도를 어떻게 해야할지 계산하는 과정을 다룬다.
