
- Input : directed graph G = (V, E) with weight function w : E → R
- Determine the path p with minimum weight from source to destination
- Weight w(p) of path p : sum of edge weights on path p
- shortest-path weight u to v :

- Variants
- Single-source shortest path : find shortest paths from a given source vertex s V to every vertex v V
- Single-destinations : find shortest paths to a given destination vertex. By reversing the direction of the each edge in the graph, the problem is reduced to single-source problem
- Single-pair : find shortest path from u to v. No easier(더 빠르게 X) than single-source problem
- All-pairs shortest-paths : find shortest path from u to v for all u, v V
- Single-source shortest path
- Bellman-Ford algorithm
- In DAG
- Dijkstra’s algorithm
- All-pairs shortest-paths
- Floyd-Warshall algorithm
Shortest Path Properties
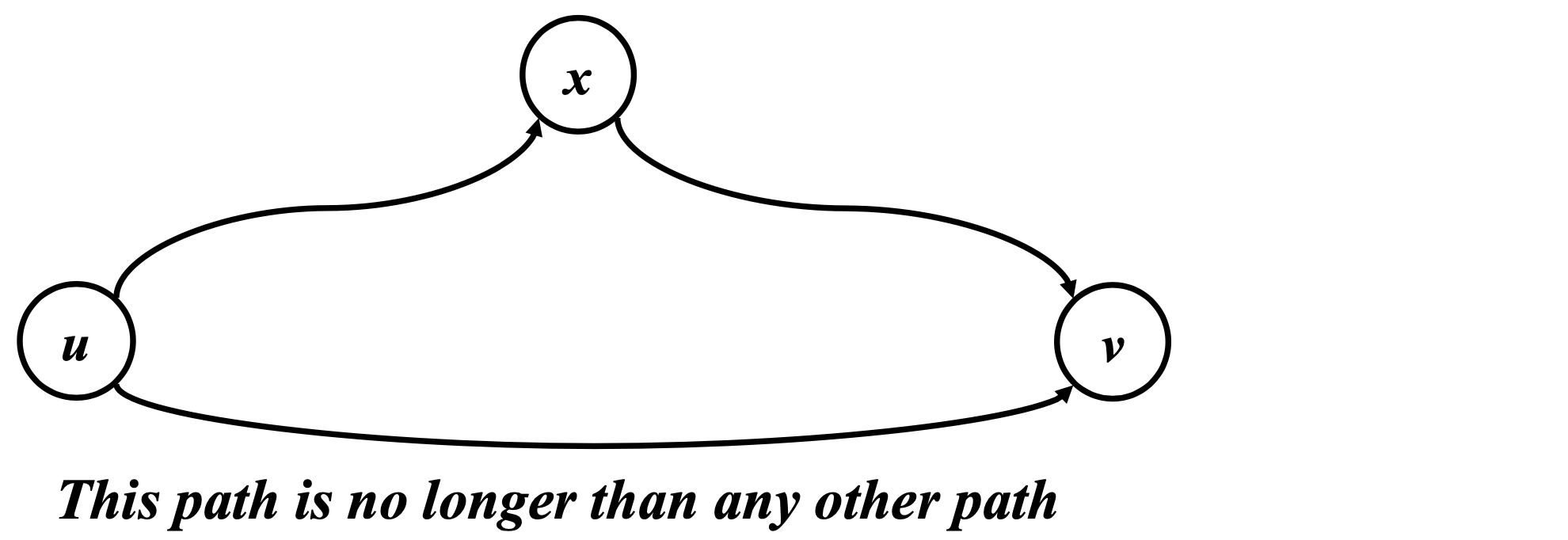
Lemma 24.1
Again, we have optimal substructure: the shortest path consists of shortest subpaths:
➡️ Proof: suppose some subpath is not a shortest path
- There must then exist a shorter subpath
- We could substitute the shorter subpath for a shortest path
- But then overall path is not shortest path. Contradiction
- Define δ(u,v) to be the weight of the shortest path from u to v. Shortest paths satisfy the triangle inequality: δ(u, v) δ(u, x) + δ(x, v)
Negative-weight edges
- OK, as long as no negative-weight cycle are reachable from the source
- If we reach a negative-weight cycle, we can just keep going around it and get w(s, v) = - for all v in the cycle
- Some algorithms work only if there are no negative-weight edges
Cycles
- Shortest paths can’t contain cycles
- We assumed that there is no negative-weight cycles
- Positive-weight cycle : Just omit(생략) it to get a shorter path
- Zero-weight cycle : There is no reason to use them. Assume that our solutions won’t use them.
🖥️ Single Source Shortest Path
- Find shortest paths from a given source vertex s V to every vertex v V
- Output for each vertex v V :
- d[v] = δ(s, v)
- Initially, d[v] =
- Reduces d[v] as algorithm progress.
But always maintain d[v] δ(s, v) - d[v] : shortest-path estimate(추정)
- [v] = predecessor(전임자) of v on a shorteat path from s.
- If no predecessor, [v] = NIL
- induces a tree – shortest-path tree
- d[v] = δ(s, v)
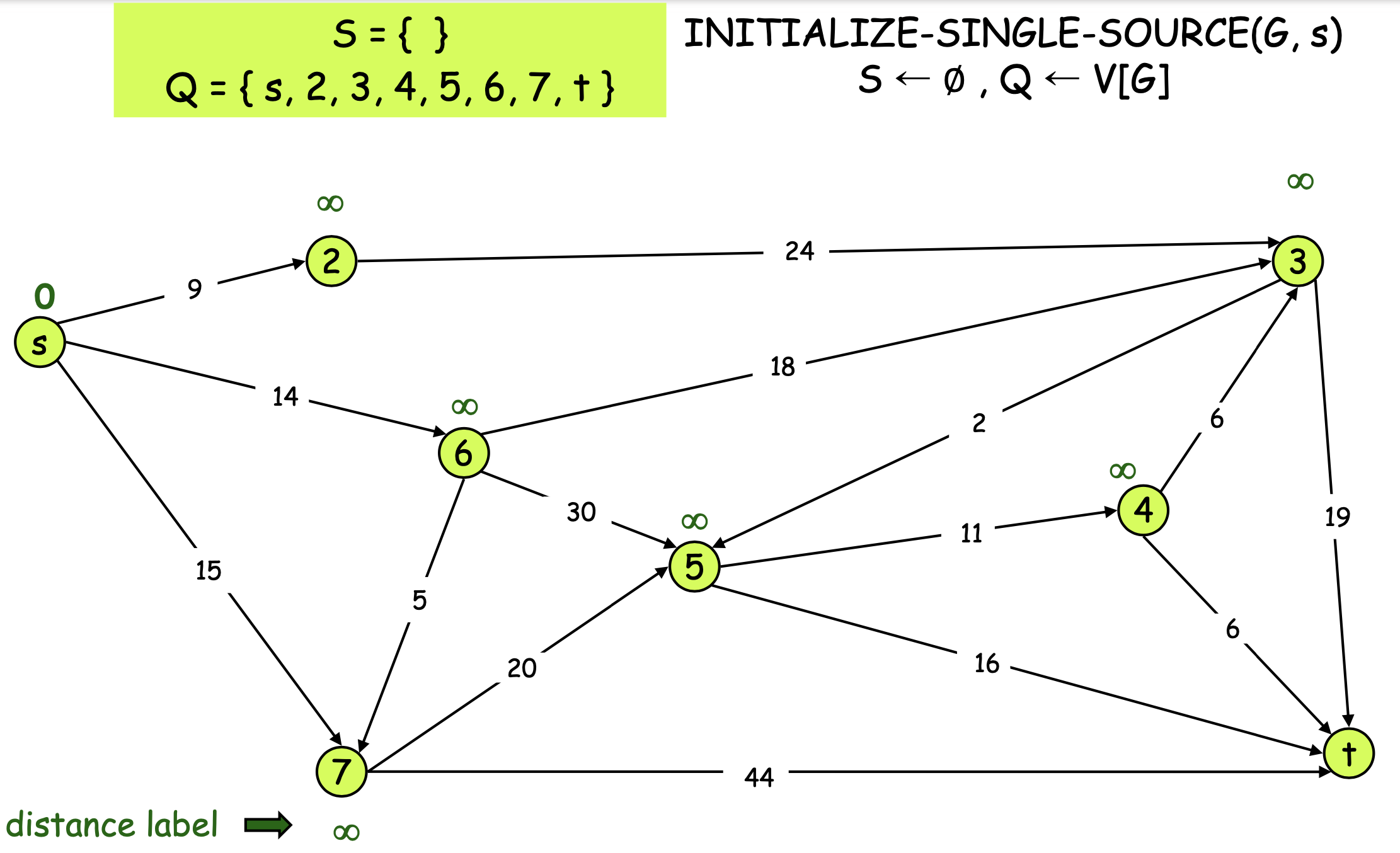
Initialization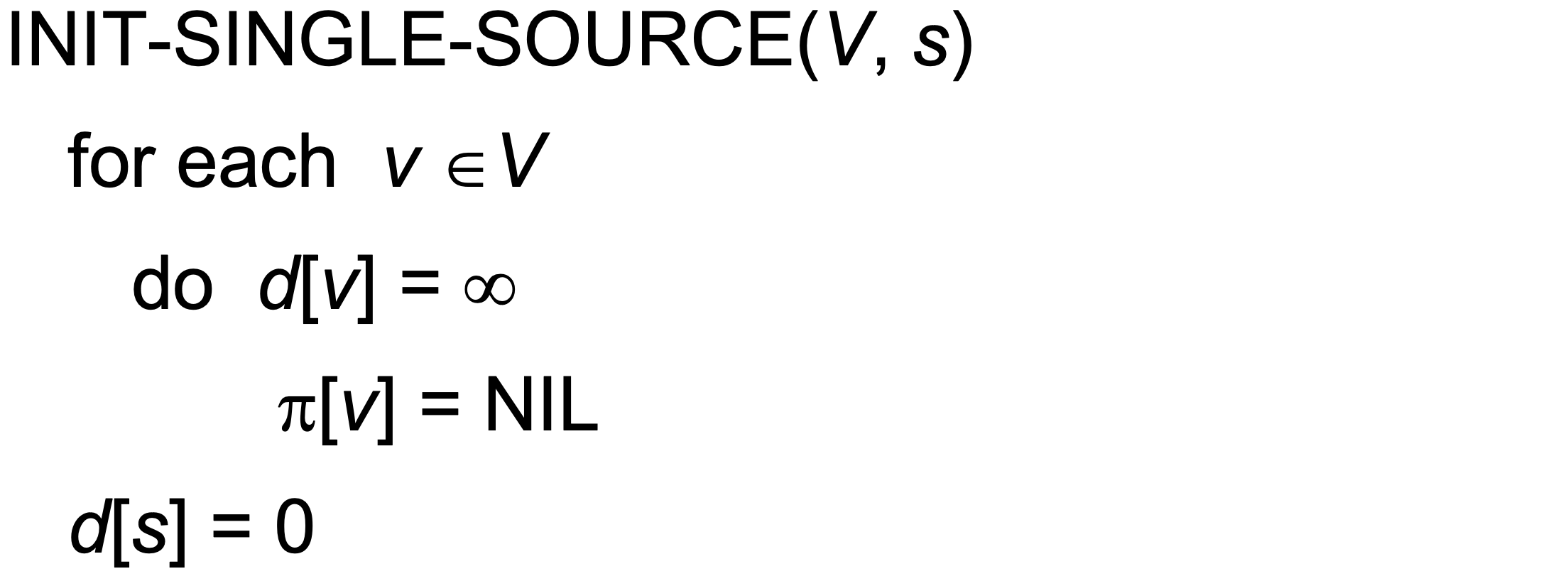
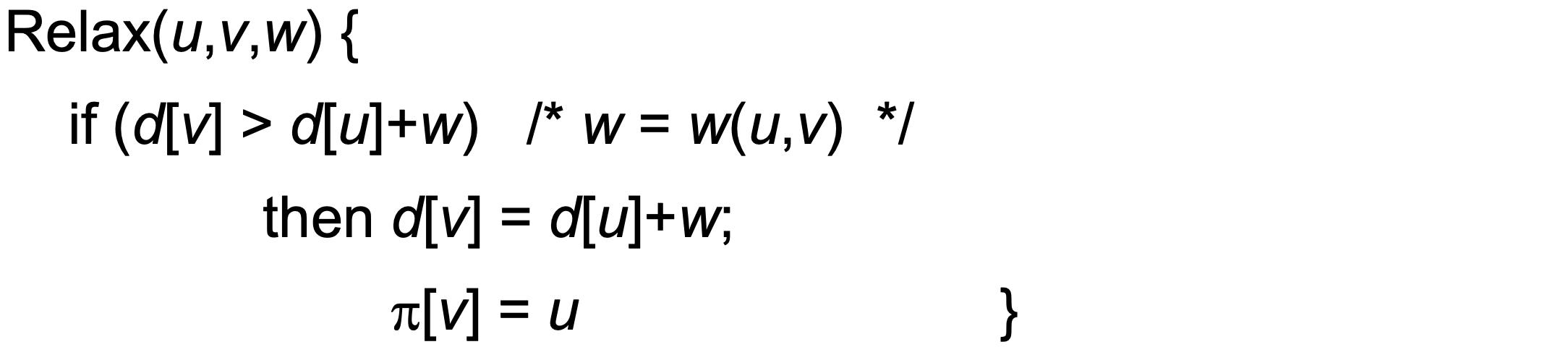
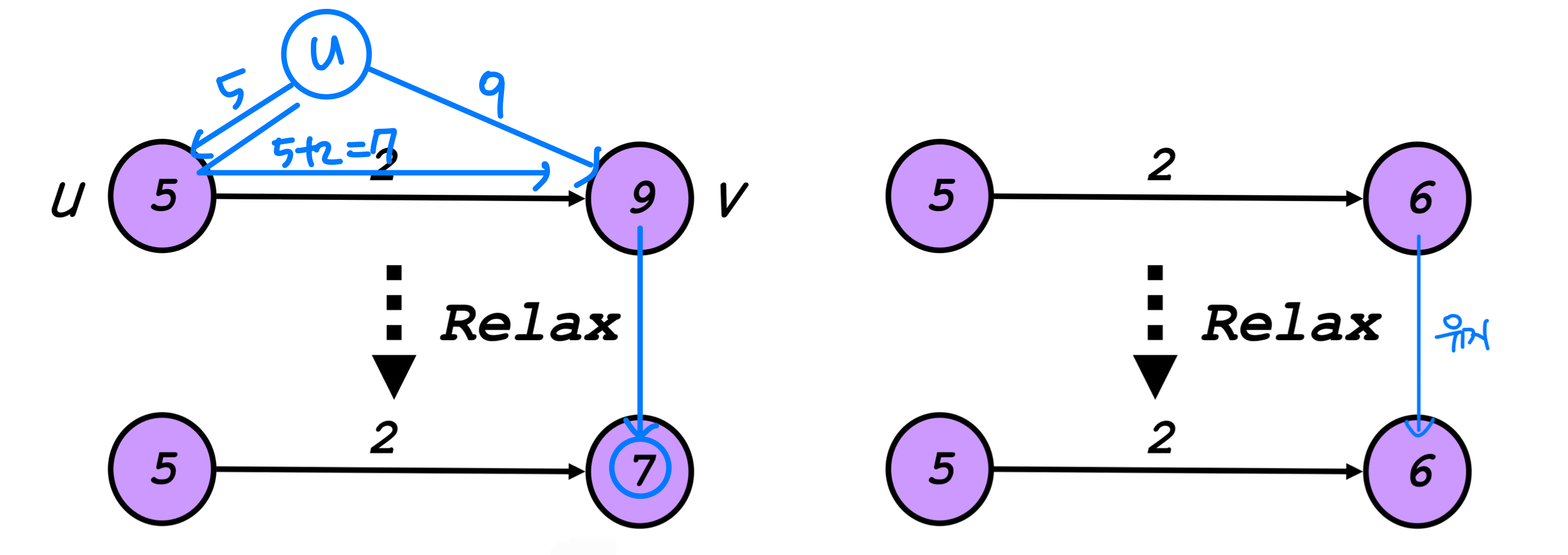
Relaxation
- A key technique in shortest path algorithms is relaxation
- Idea: for all v, maintain upper bound d[v] on δ(s,v)!
[1] Bellman-Ford algorithm
- Solves the single-source shortest-paths problem in general case in which edge weights may be negative
- Allow negative-weight edges and produce a correct answer as long as no negative-weight cycles are reachable from the source
- Returns a boolean value
- negative-weight cycle – FALSE
- No such cycle – TRUE
Pseudo-code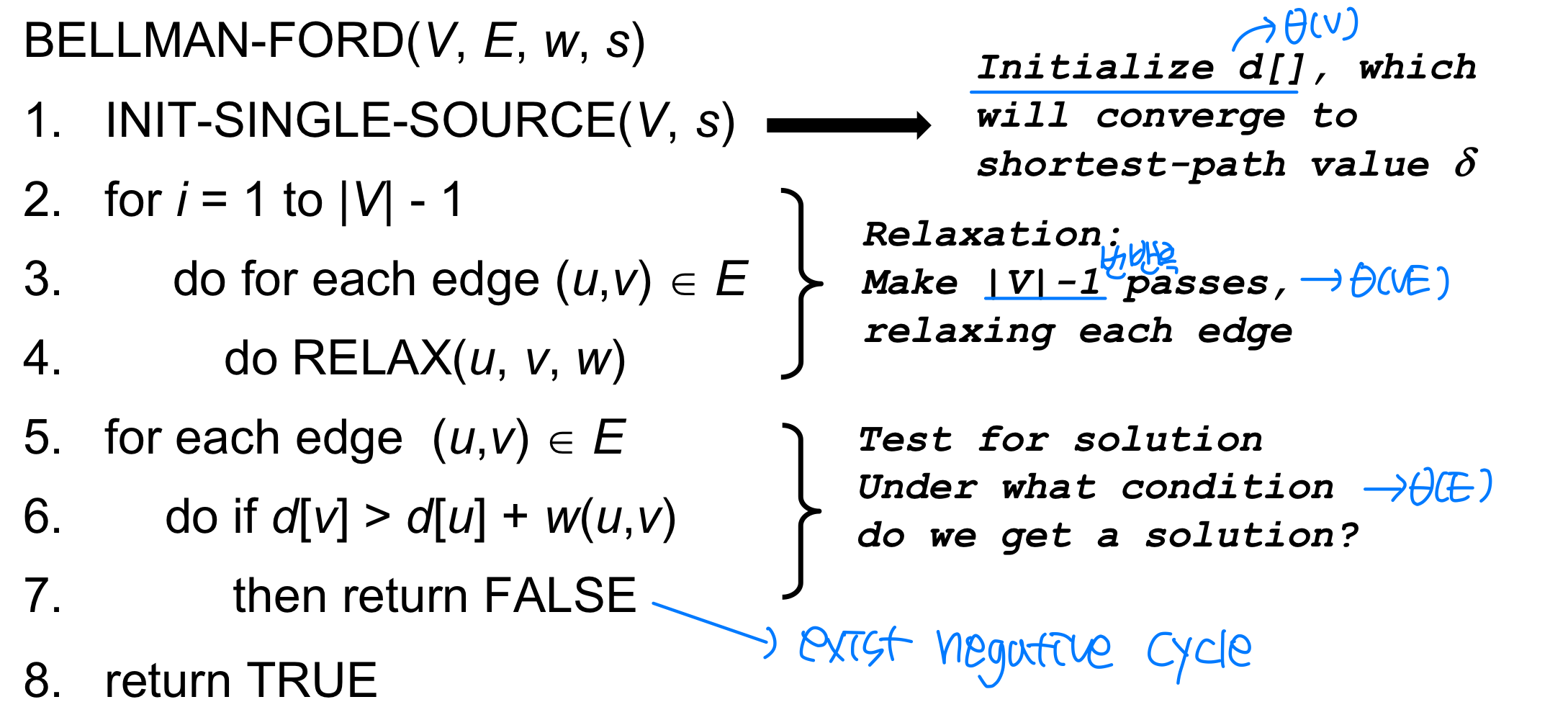 The first loop relaxes all edges |V| - 1 times
The first loop relaxes all edges |V| - 1 times
Time : Θ(VE)
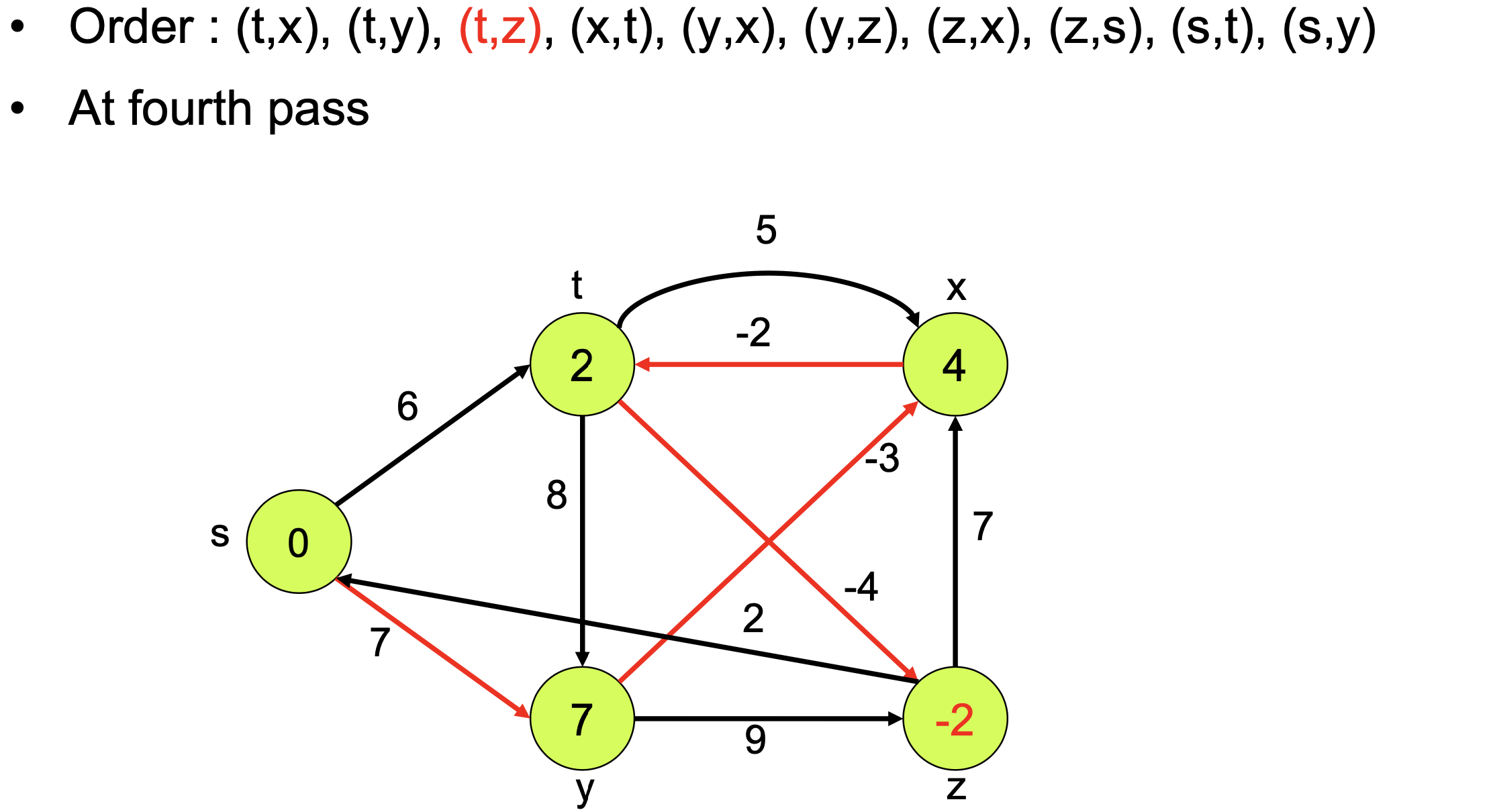
Example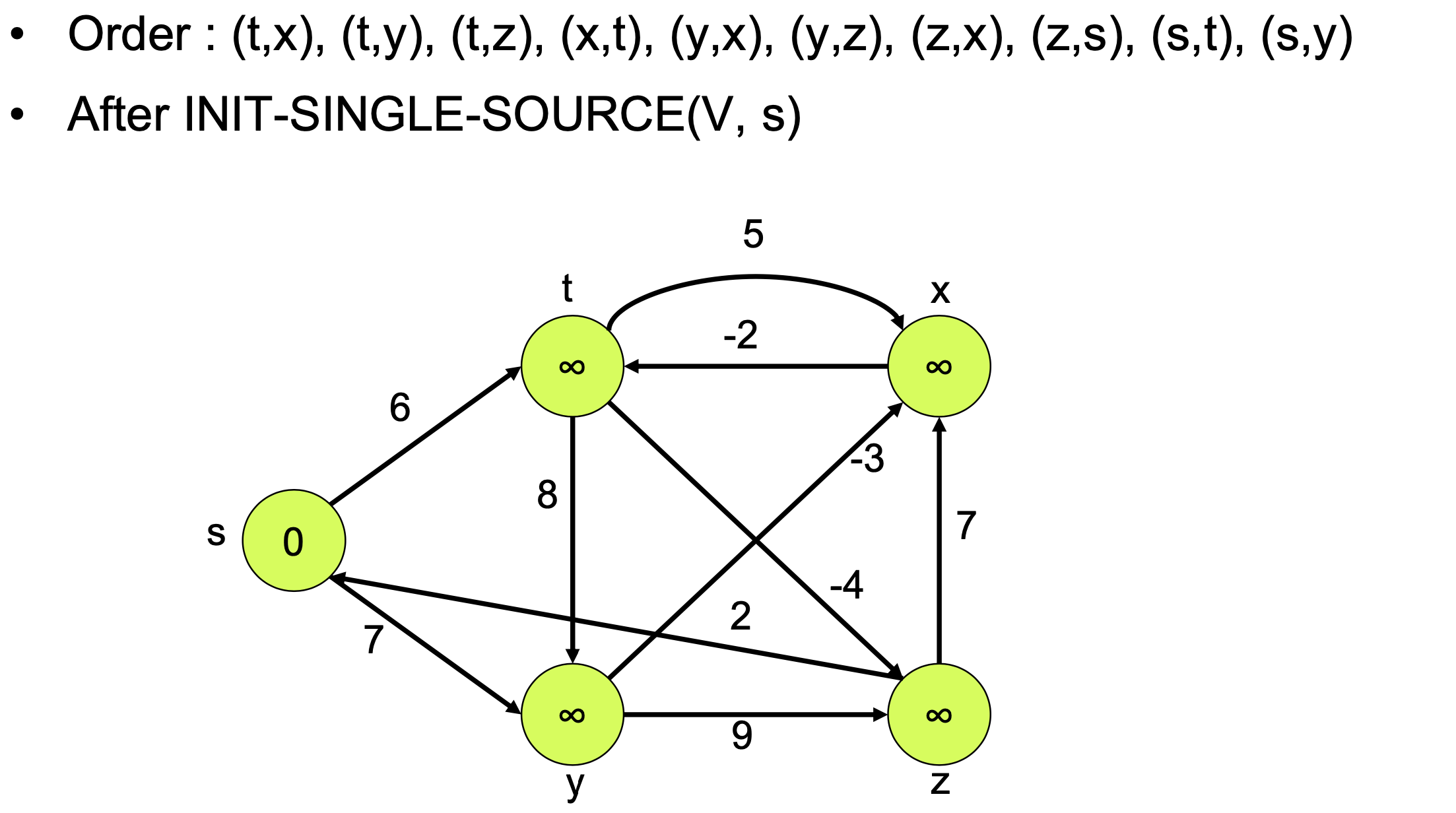
Neg. Weight Cycle Example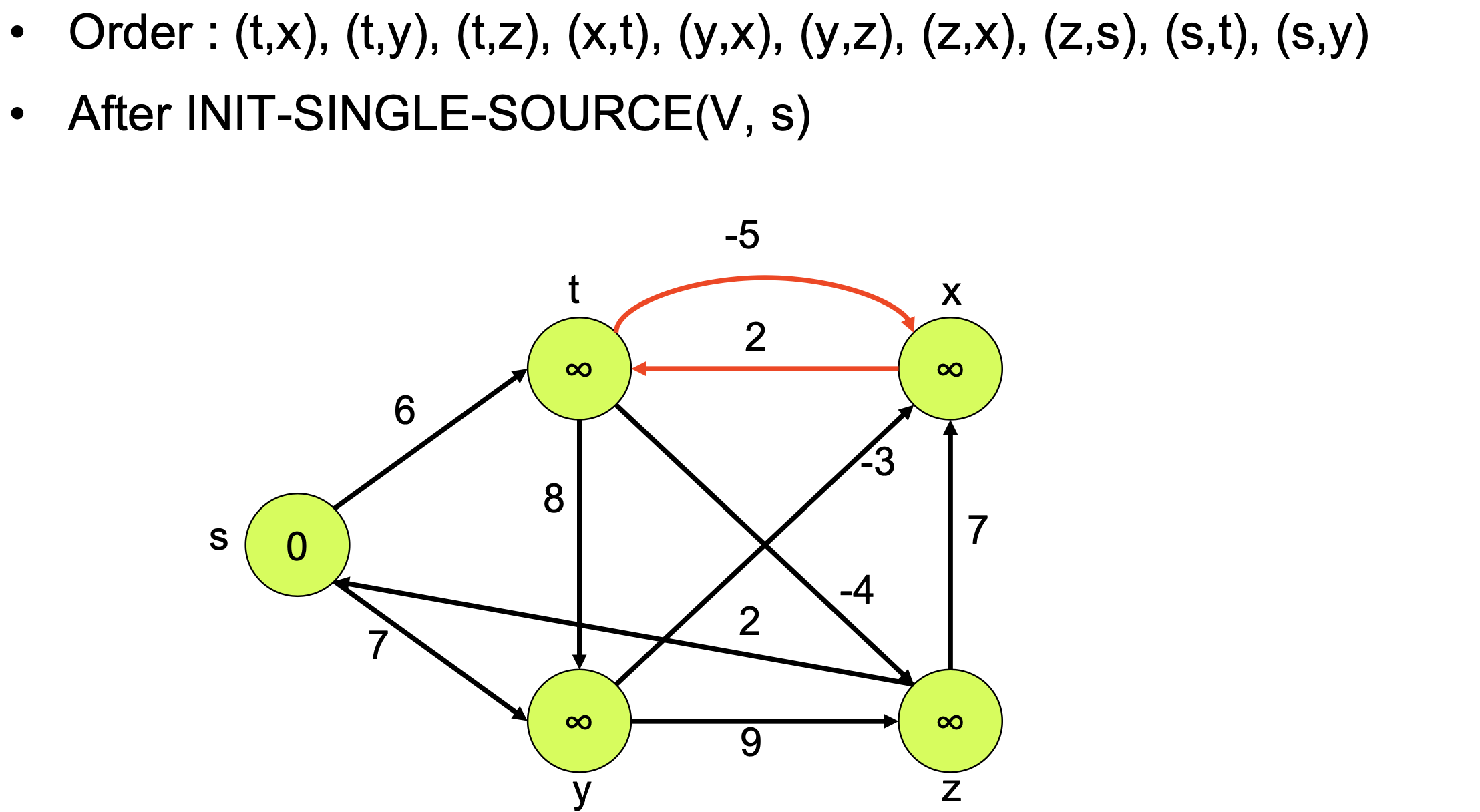 ➡️ d가 계속 작아지고 풀리지 path가 안나옴
➡️ d가 계속 작아지고 풀리지 path가 안나옴
[2] SSP in DAG
- Problem: finding shortest paths in DAG
- Bellman-Ford takes Θ(VE) time ➡️ How can we do better?
- Idea: use topological sort
- Since it is a DAG, there are no cycles
- Every path in a DAG is subsequence of topologically sorted, so processes vertices on each shortest path from left to right, then it would be done in one pass
Example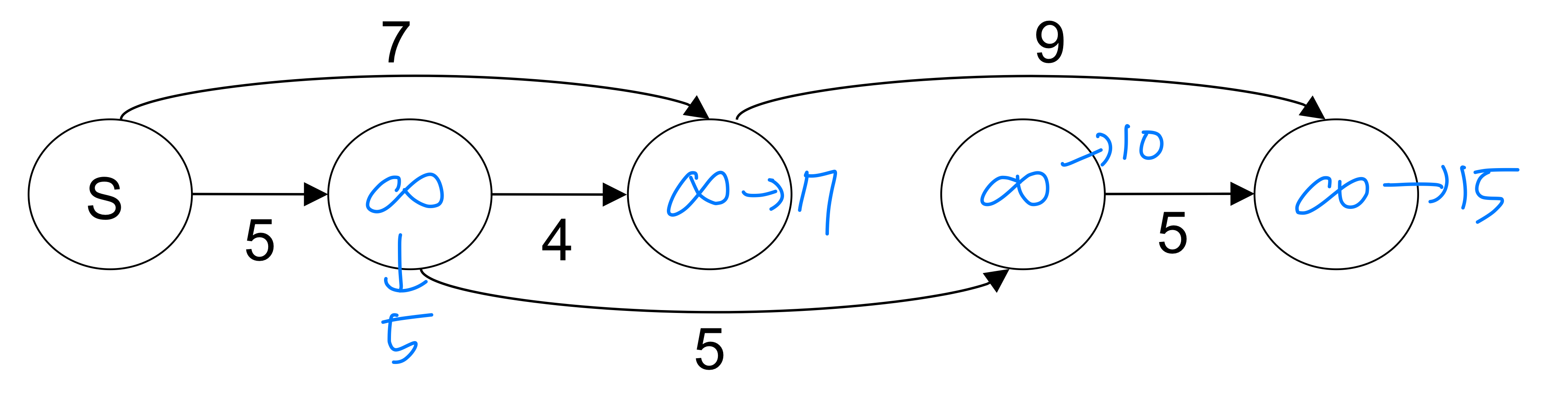
Pseudocode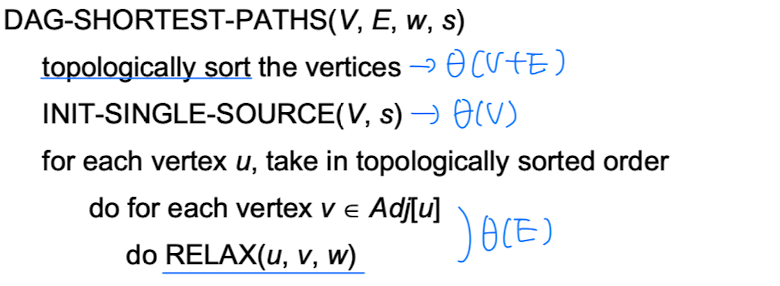 Time : Θ(V+E)
Time : Θ(V+E)
[3] Dijkstra’s Algorithm
- If there are no negative weight edge, we can beat(faster than) Bellman-Ford
- Similar to breadth-first search : weighted version of breadth-first search
- Grow a tree gradually(서서히), advancing from vertices taken from a queue.
- Instead of a FIFO queue, uses a priority queue
- Keys are shortest-path weights (d[v])
- Have two sets of vertices :
- S = vertices whose final shortest-path weights are determined
- Q = priority queue = V – S.
- For the graph G=(V,E), maintains a set S of vertices for which the shortest paths are known
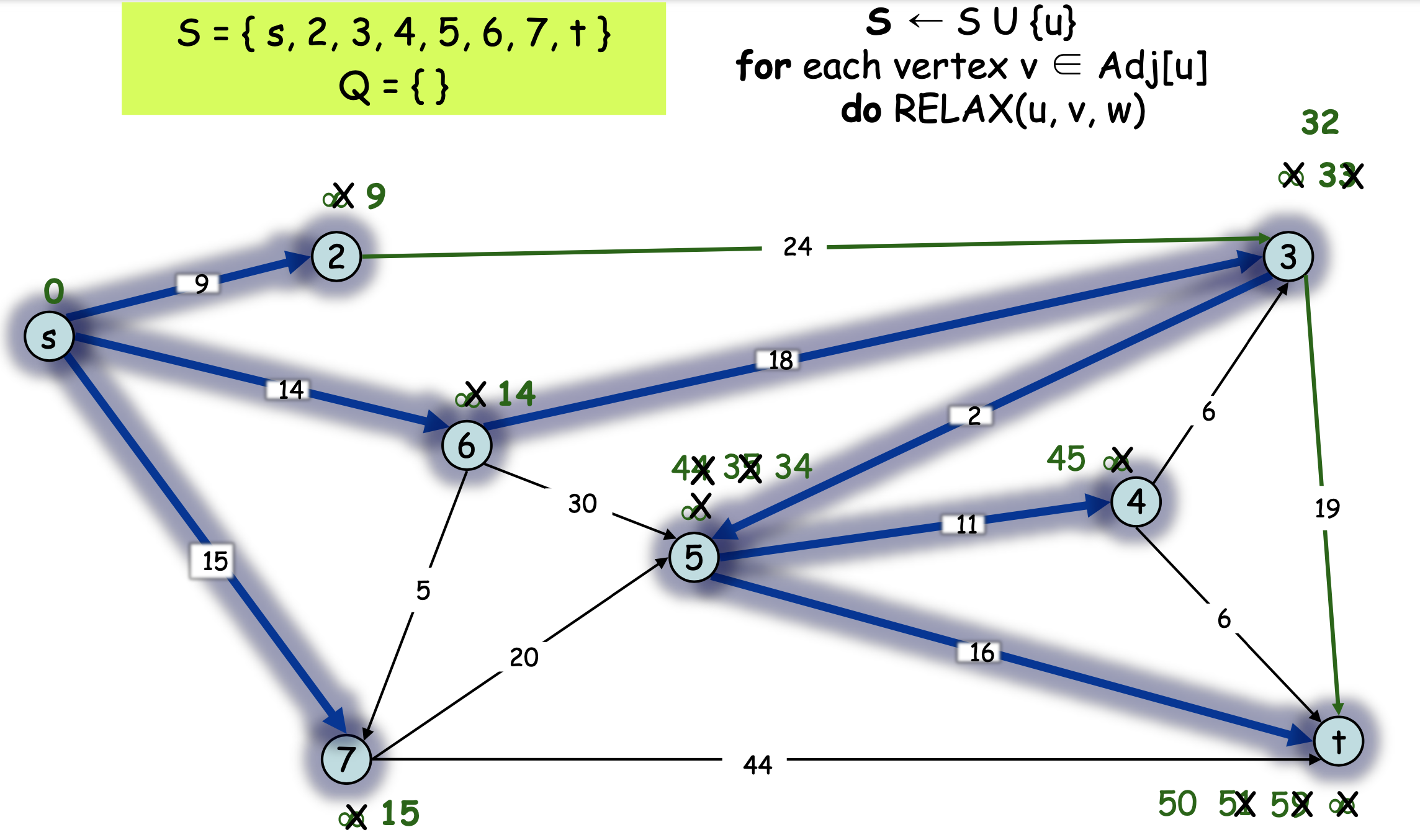
- Repeatedly selects the vertex u (u ∈ V-S), with the minimum shortest-path estimated, adds u to S, and relaxes all edges leaving u
- What is the design strategy? ➡️ Greedy
Pseudo-code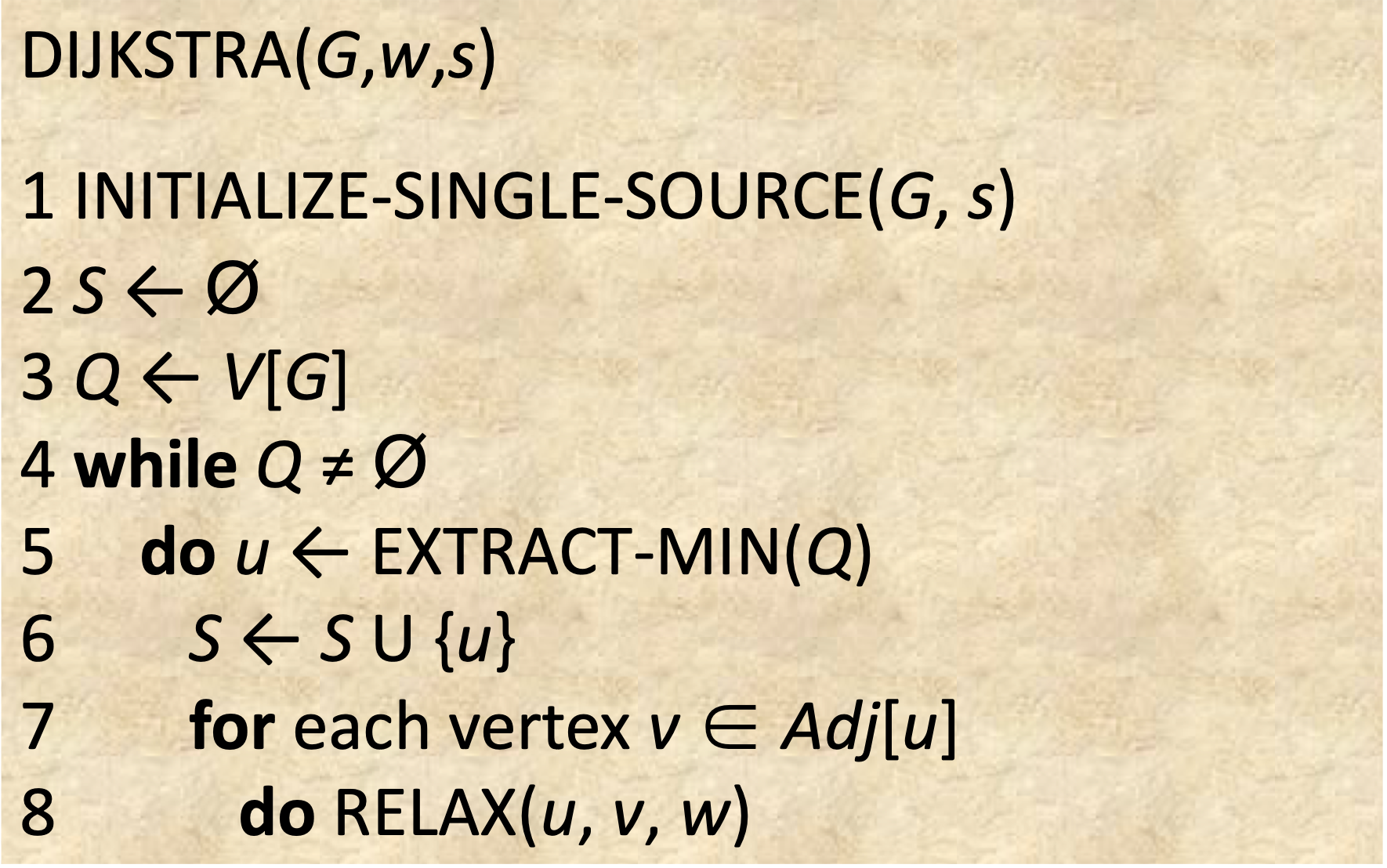
Example - Find shortest path from s to t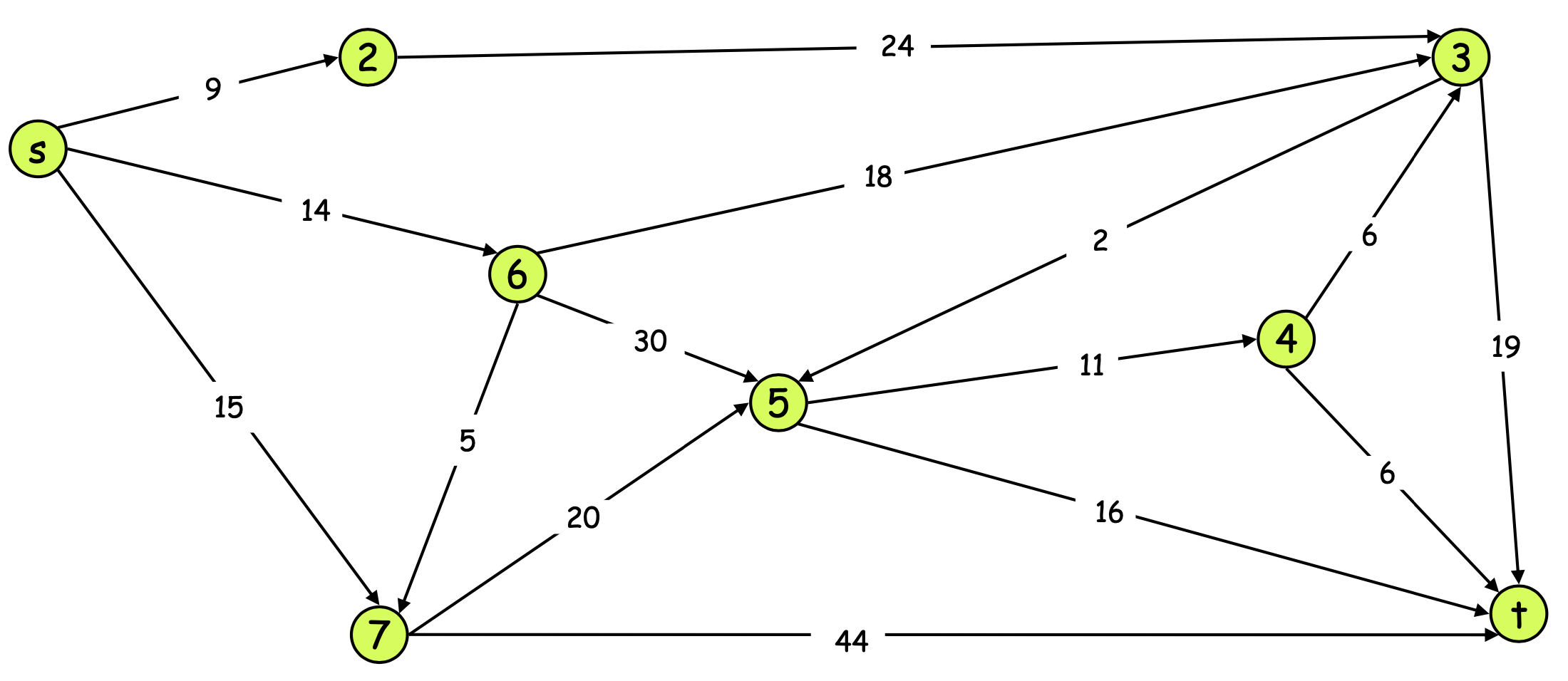
Correctness
- Theorem 24.6
- loop invariant : At the start of each iteration of the while loop of lines 4-8, d[v] = (s,v) for each vertex v ∈ S
Negative weight edge, Does not work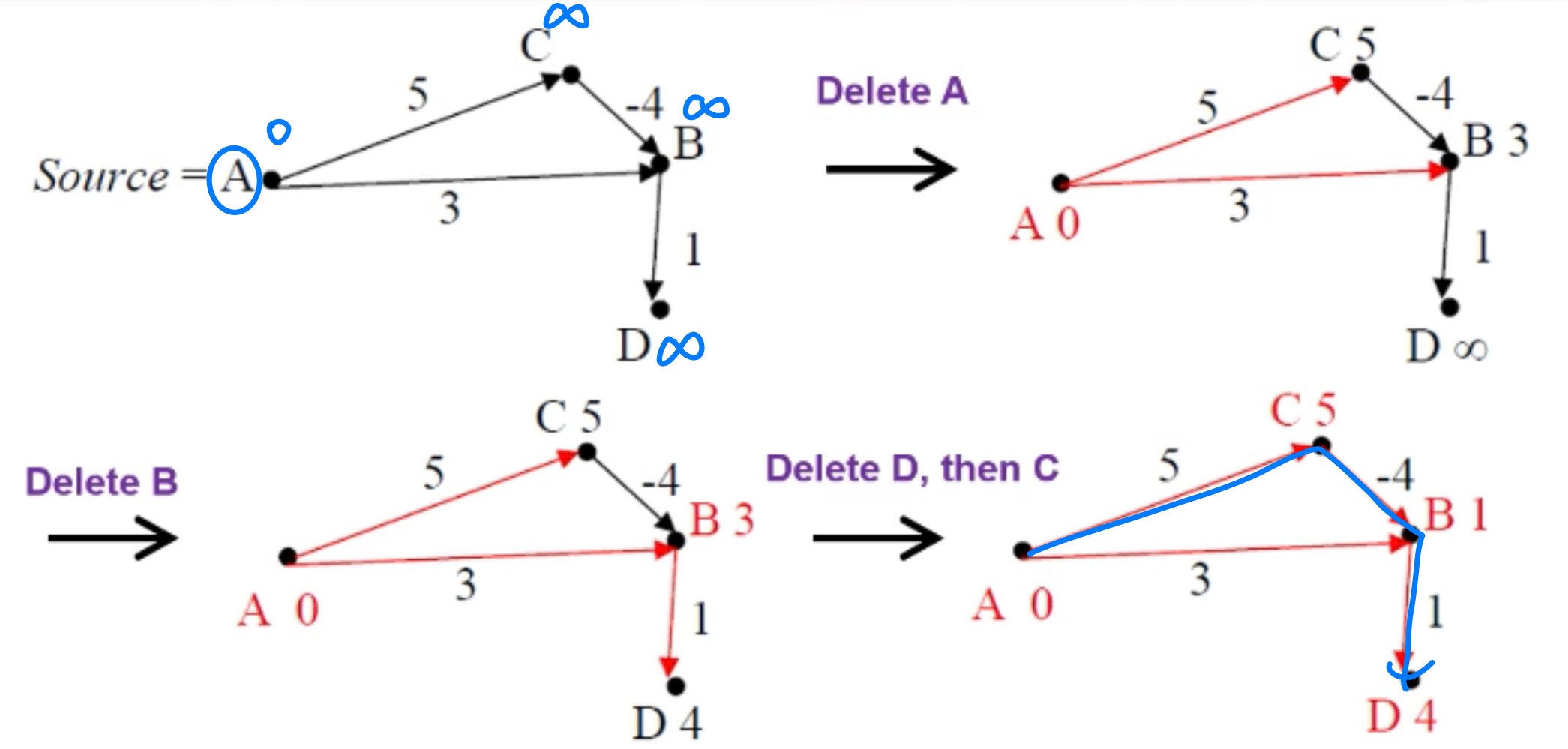
The glgorithm now terminates because the queue is empty. However, the path A→C→B→D has total length 5 + (-4) + 1 = 2 < 4; thus the length of the shortest path from the source A to D was not correctly evaluated
Time Analysis
- Like Prim’s algorithm, performance depends on implementation of priority queue
- Binary heap :
- Each operation takes O(lg V) time → O(E lg V)
- Fibonacci heap :
- O(V lg V + E) time
- Binary heap :
🖥️ All Pairs Shortest Path
Floyd - Warshall Algorithm
- The easiest way!
- Iterate Dijkstra’s and Bellman-Ford |V| times(V번 반복)!
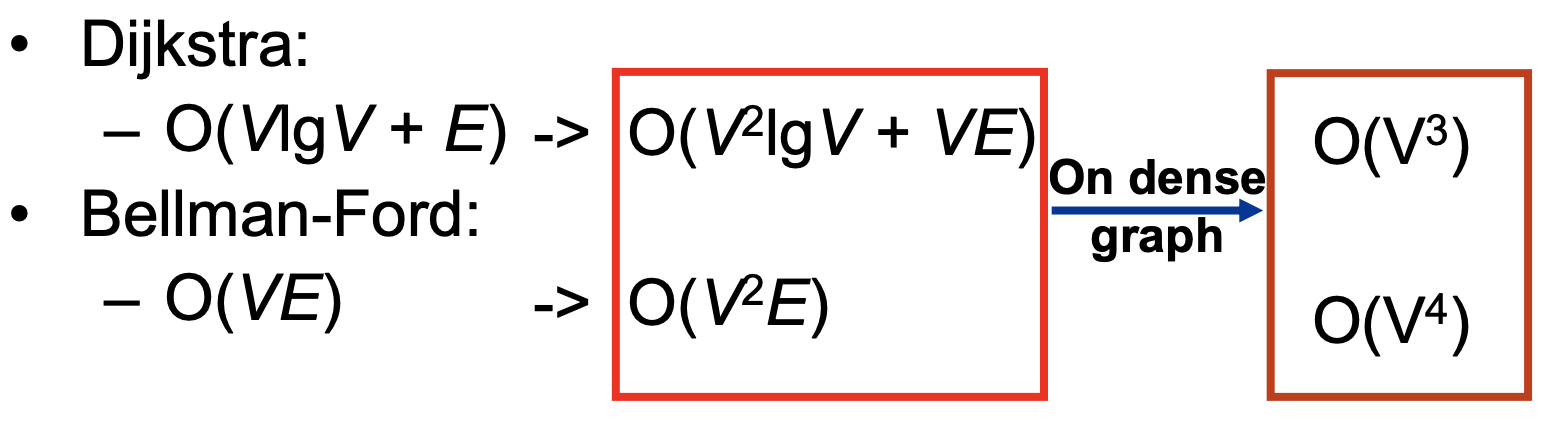 → Dense graph : E = O(V)
→ Dense graph : E = O(V)
- Any other faster algorithms?
- Floyd-Warshall Algorithm
- Floyd-Warshall Algorithm
- Negative edges are allowed
- Assume that no negative-weight cycle
- Dynamic Programming Solution
- Optimal substructure
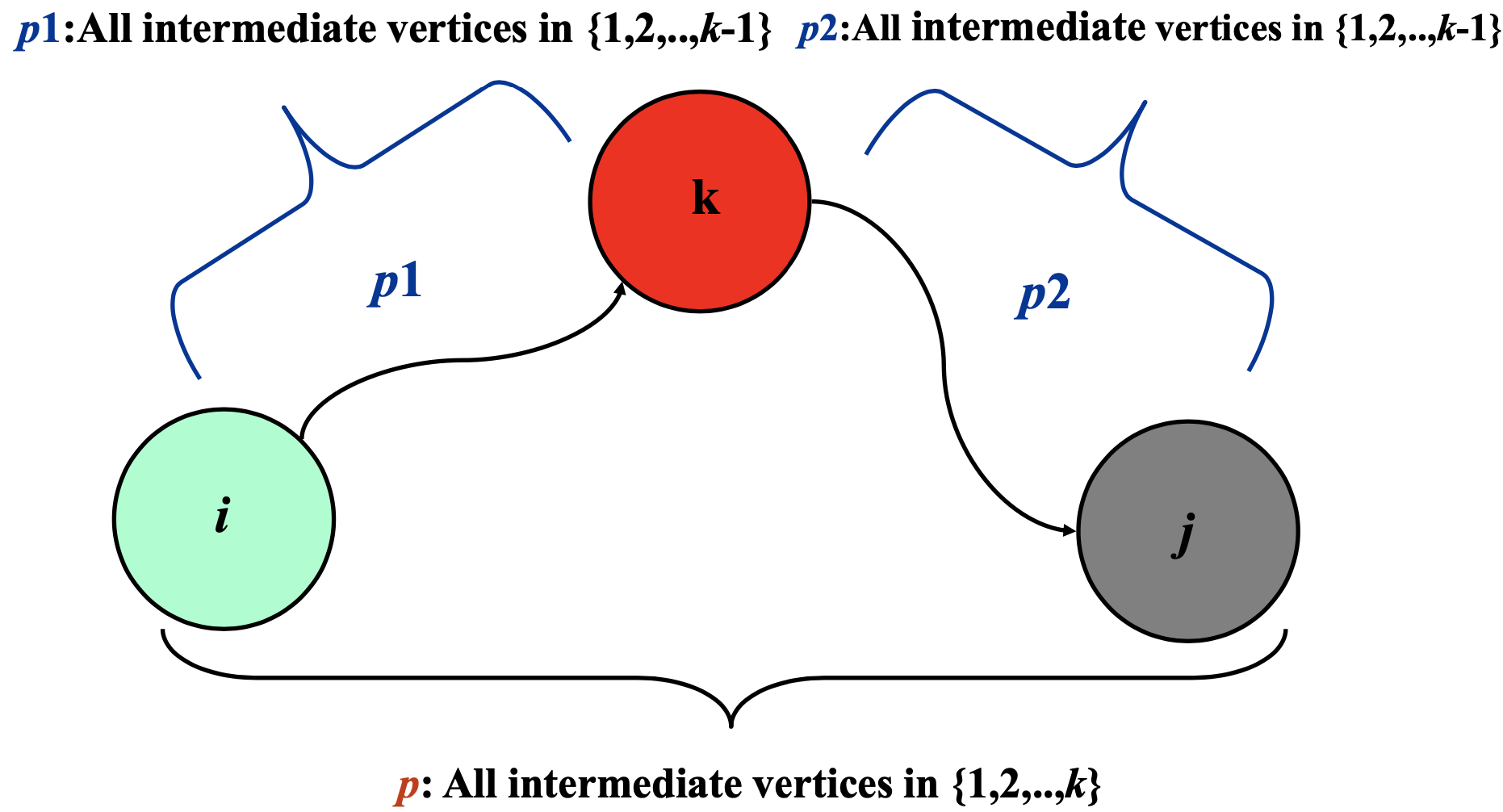
The structure of a shortest path
- Intermediate vertex
- In simple path p = <v,...,v>, any vertex of p other than v and v(제외), i.e., any vertex in the set {v,...,v}
- Key Observation
- For any pair of vertices i, j in V.
- Let p be a minimum-weight path of all paths from i to j whose intermediate vertices are all from {1,2,...,k}(중에 있다. 모두 path에 포함되는건 x) → Prob
- Assume that we have all shortest paths from i to j whose intermediate vertices are from {1,2,...,k-1} → Subprob
- Observe relationship between path p and above shortest paths(subprob)
Key Observation
- A shortest path does not contain the same vertex twice.
- Proof: A path containing the same vertex twice contains a cycle(No simple path). Removing cycle give a shorter path.
- Proof: A path containing the same vertex twice contains a cycle(No simple path). Removing cycle give a shorter path.
- p is determined by the shortest paths whose intermediate vertices from {1,...,k-1}
- Case1: If k is not an intermediate vertex of p
- Path p is the shortest path from i to j with intermediates from {1,...k-1} (without k)
- Case2: If k is an intermediate vertex of path p
- Path p can be broken down into i -- p1 → k - p2 → j
- p1 is the shortest path from i to k with all intermediate vertices in the set {1,2,...,k-1}
- p2 is the shortest path from k to j with {1,2,...,k-1}
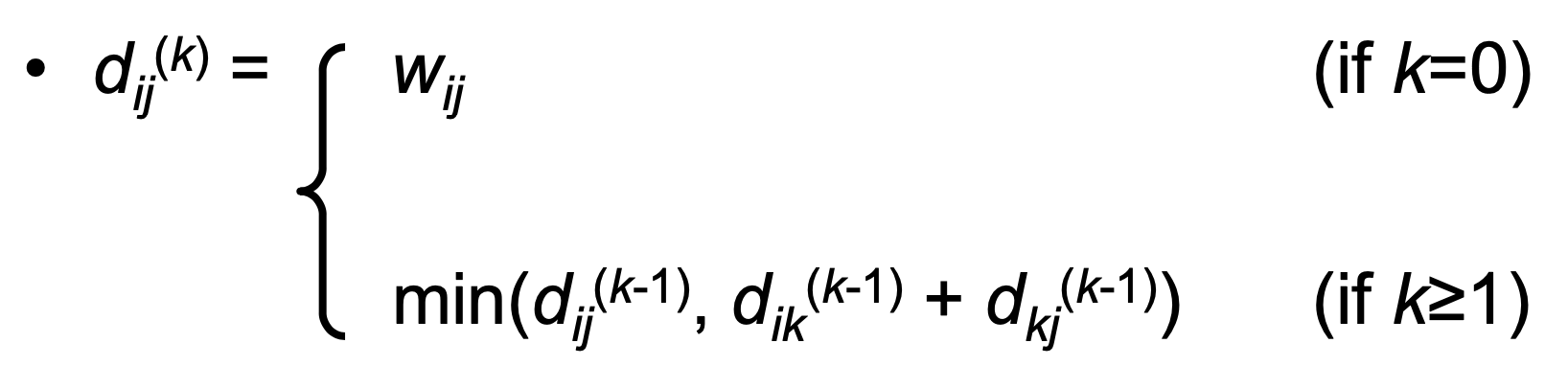
A recursive solution
- Let d be the length of the shortest path from i to j such that all intermediate vertices on the path are in set {1,2,...,k}
Ex_d → 1, 2, 4, 3 - Let D(k) be the n Χ n matrix [d]
- d is set to be w (no intermediate vertex).
- d = min(d , d + d ) (k≥1)
→ min(k가 intermediate vertex인 경우, 아닌경우) - D(n) = (d) gives the final answer, for all intermediate vertices are in the set {1,2,...,n} : d = δ(i,j) for all i,j ∈ V
Extracting the Shortest Paths
- The predecessor pointers pred[i,j] can be used.
- Initially,
- pred[i,j] = NIL (if i = j or w = )
- pred[i,j] = i (if i ≠ j or w < )
- Whenever the shortest path from i to j passing through an intermediate vertex k is discovered, we set pred[i,j] = k
- Observation:
- If pred[i,j] = NIL, shortest path does not exist
- If there exists shortest path and the shortest path does not pass through any intermediate vertex, then pred[i,j] = i
- If pred[i,j] = k, vertex k is an intermediate vertex on shortest path form i to j
- How to find?
- If pred[i,j] = i, the shortest path is edge (i,j)
- Otherwise, recursively compute
(i , pred[i,j]) and (pred[i,j] , j)
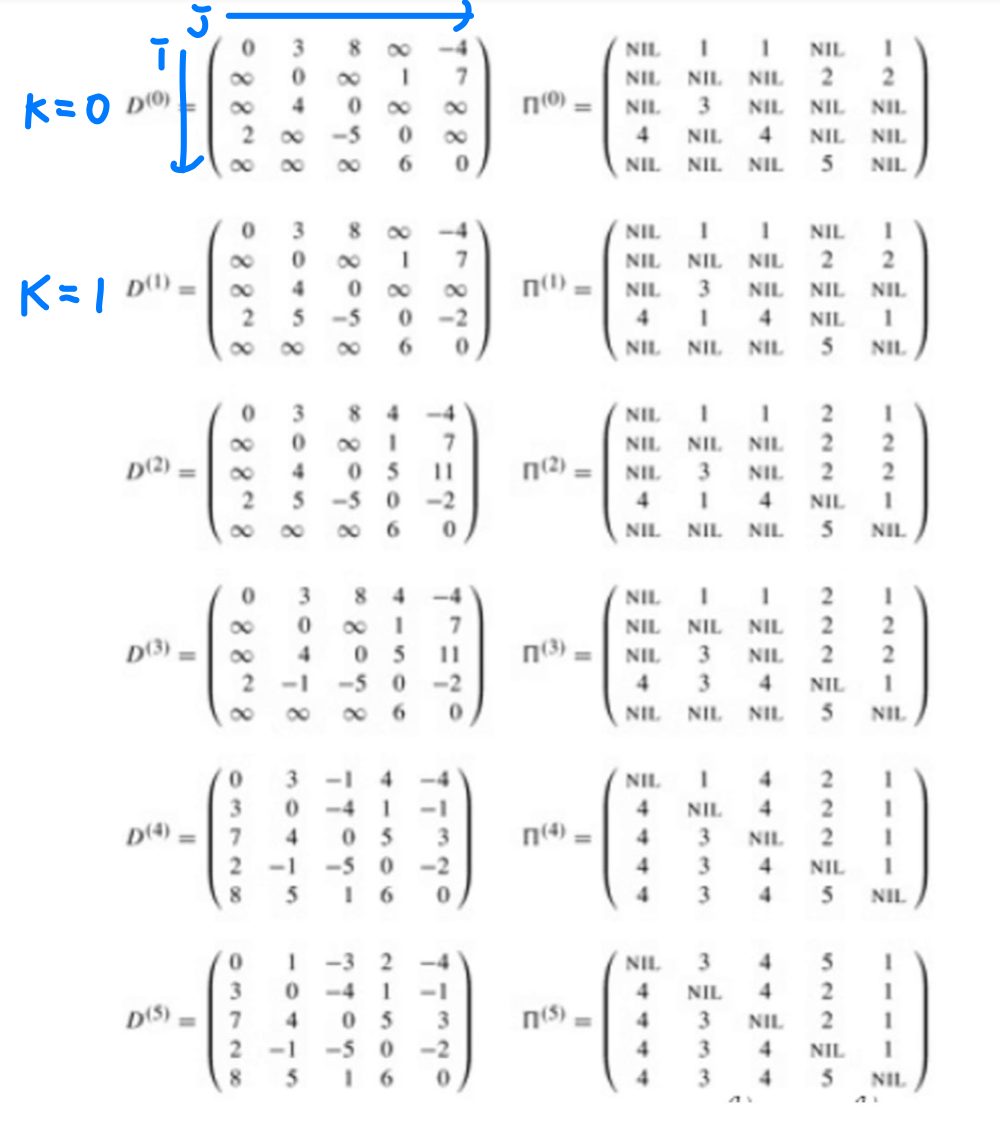
Computing the weights bottom up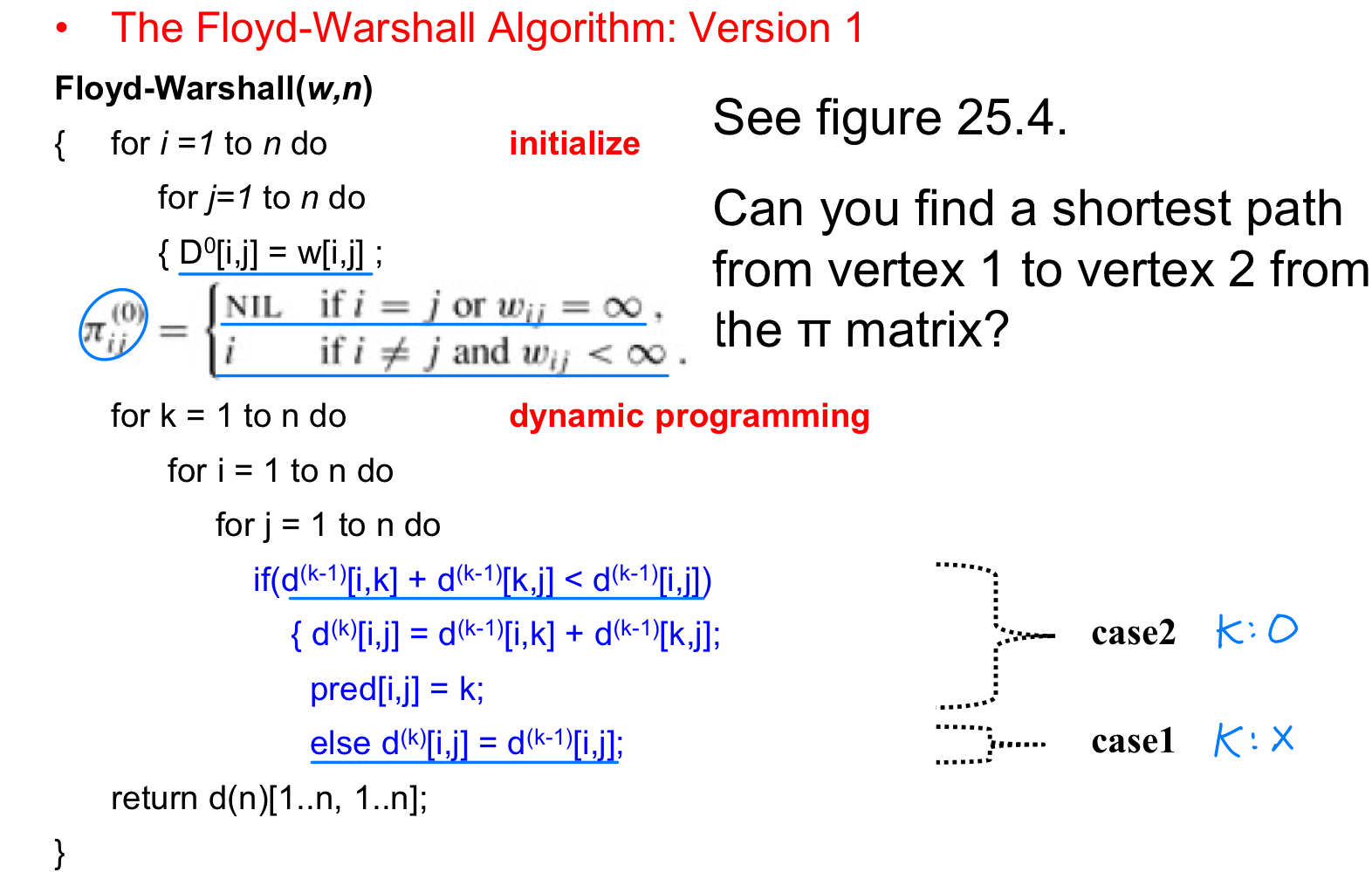
Example
Exercise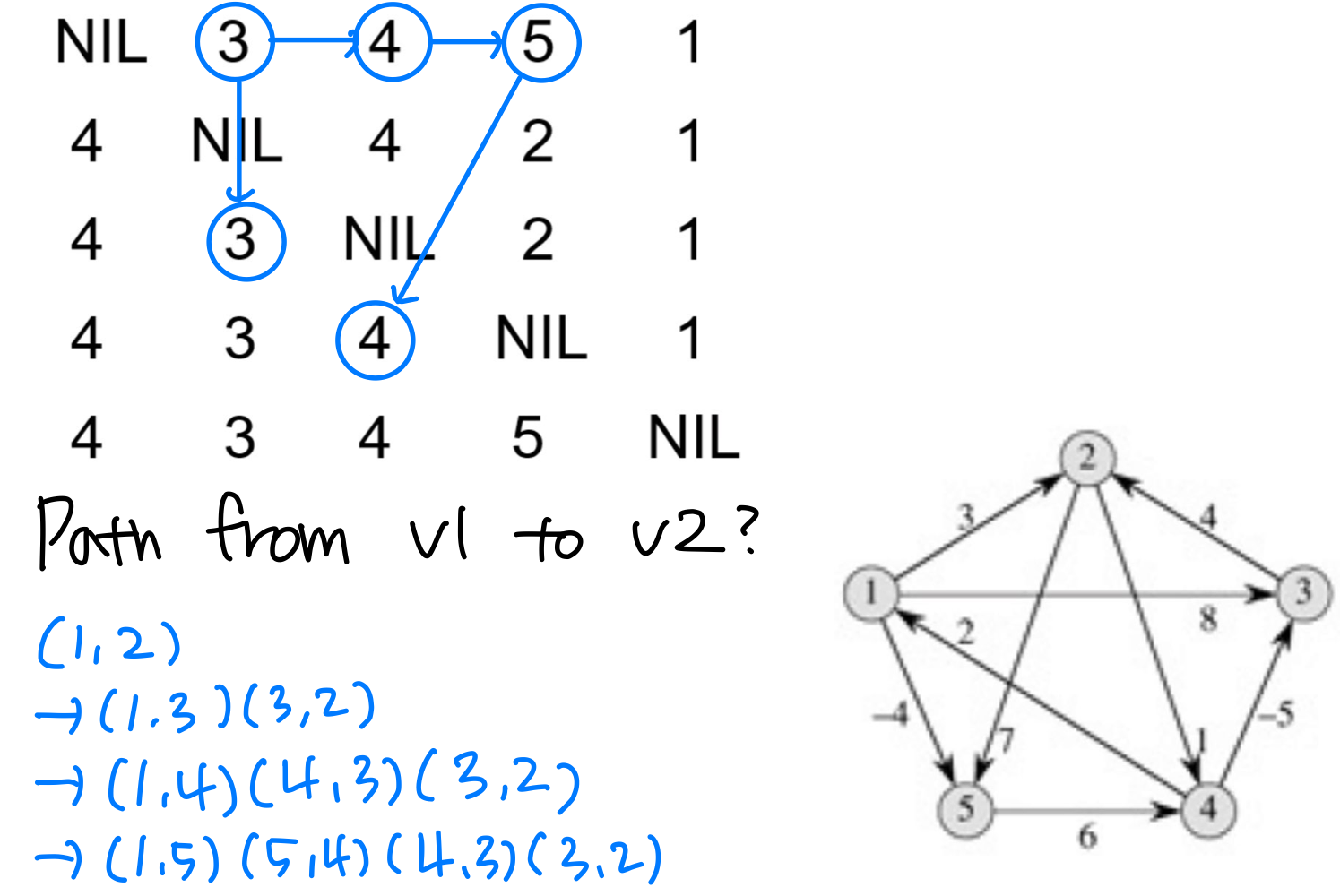
Analysis
- Θ(n) → Θ(|V|)
- Faster than previous algorithms
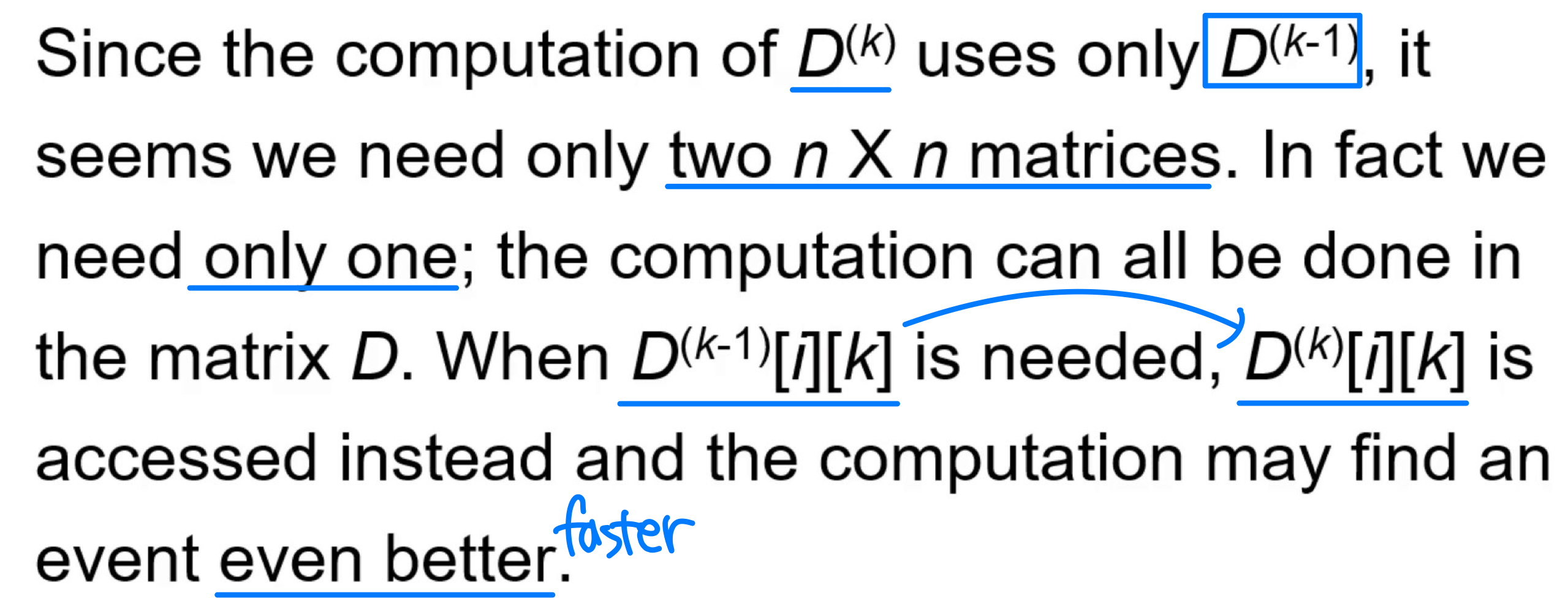
O(|V|), O(|V|lg|V|) - Problem: ⭐️ Space Complexity Θ(|V|)
- It is possible to reduce this down to Θ(|V|) by keeping only one matrix instead of n
Modified Version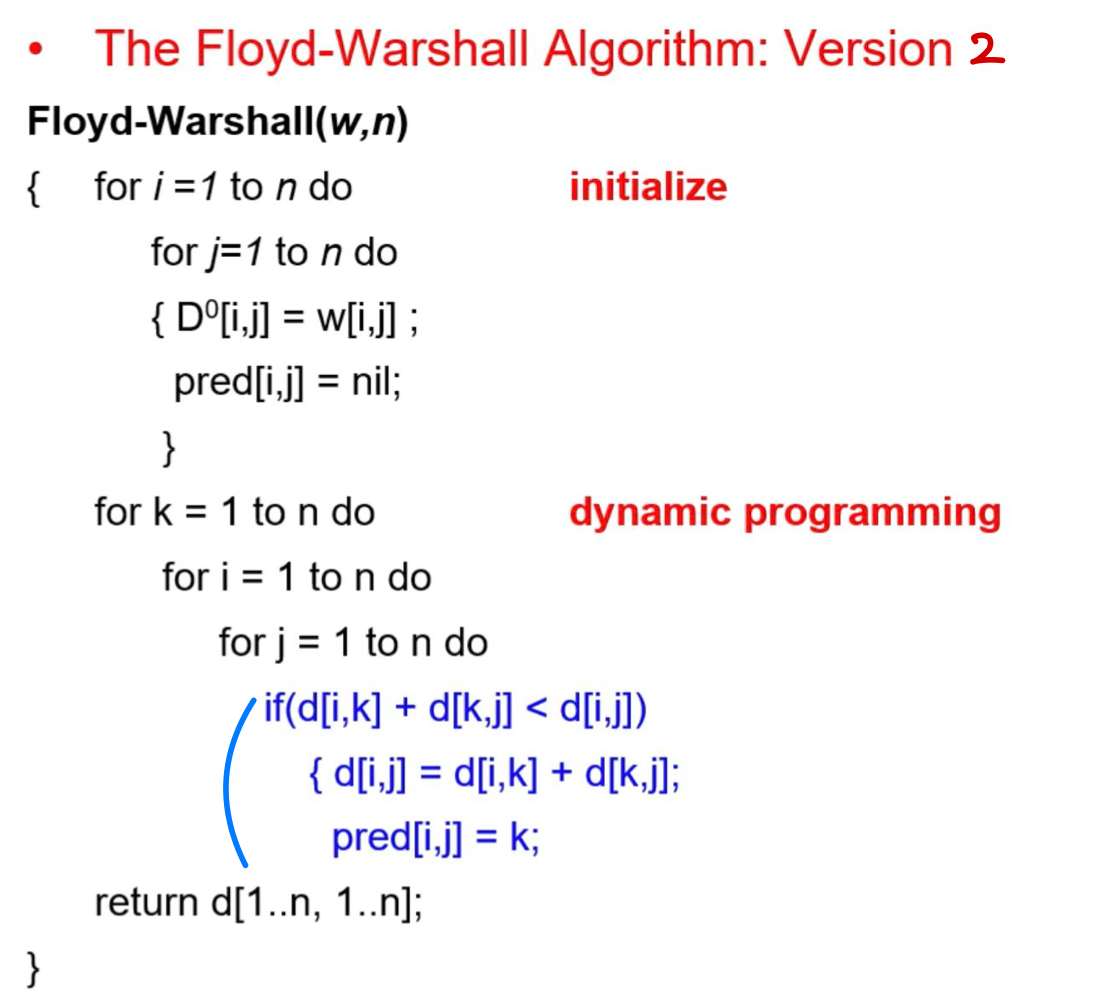
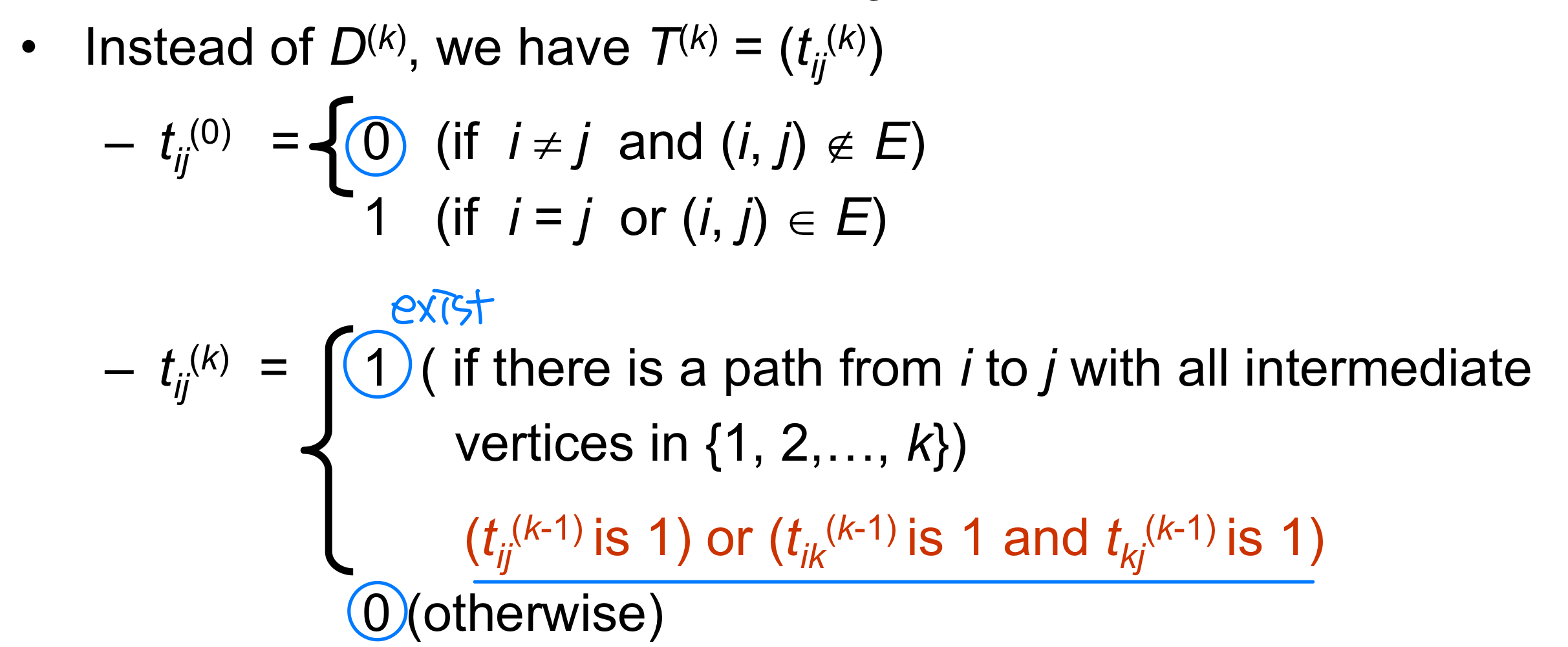
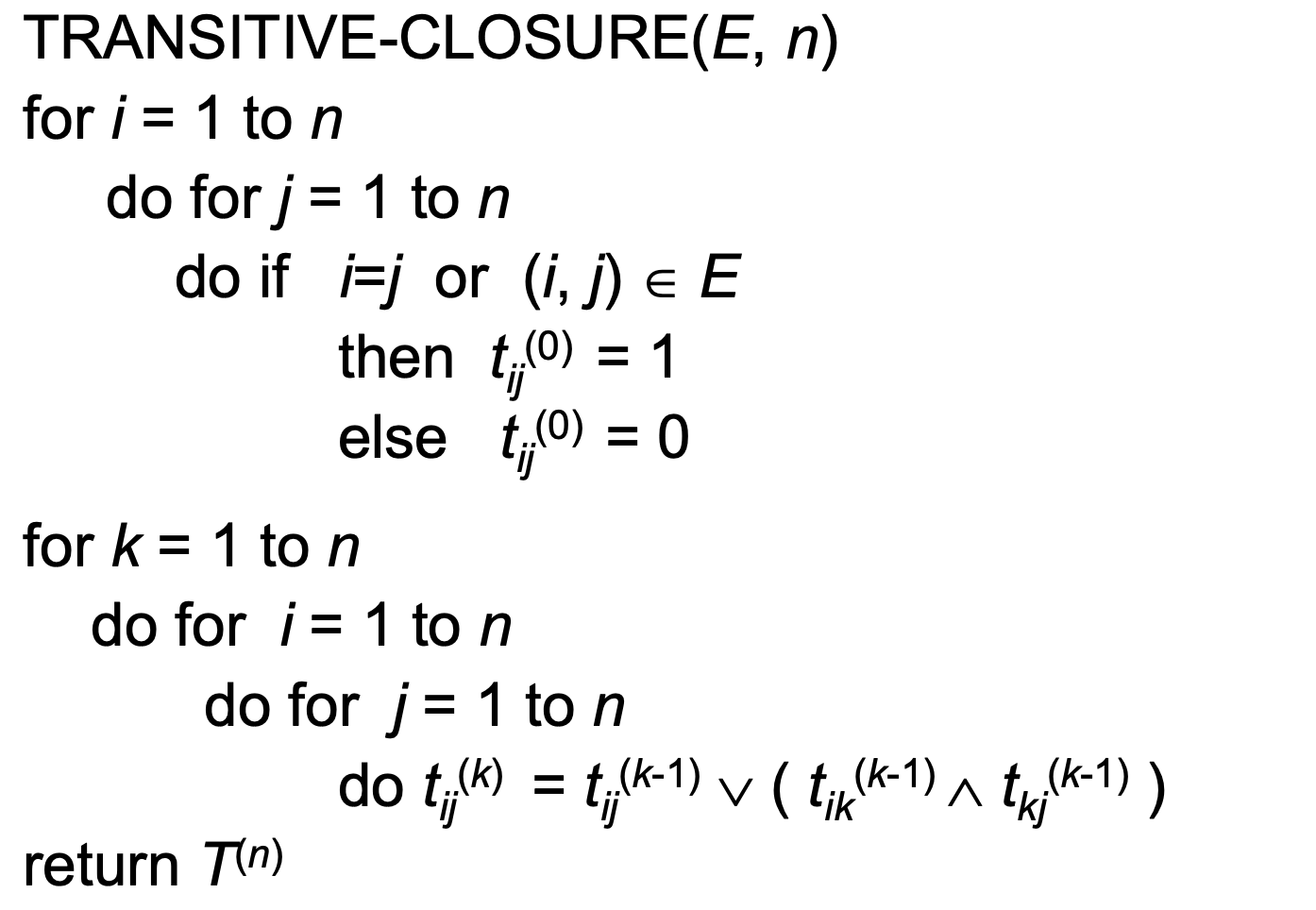
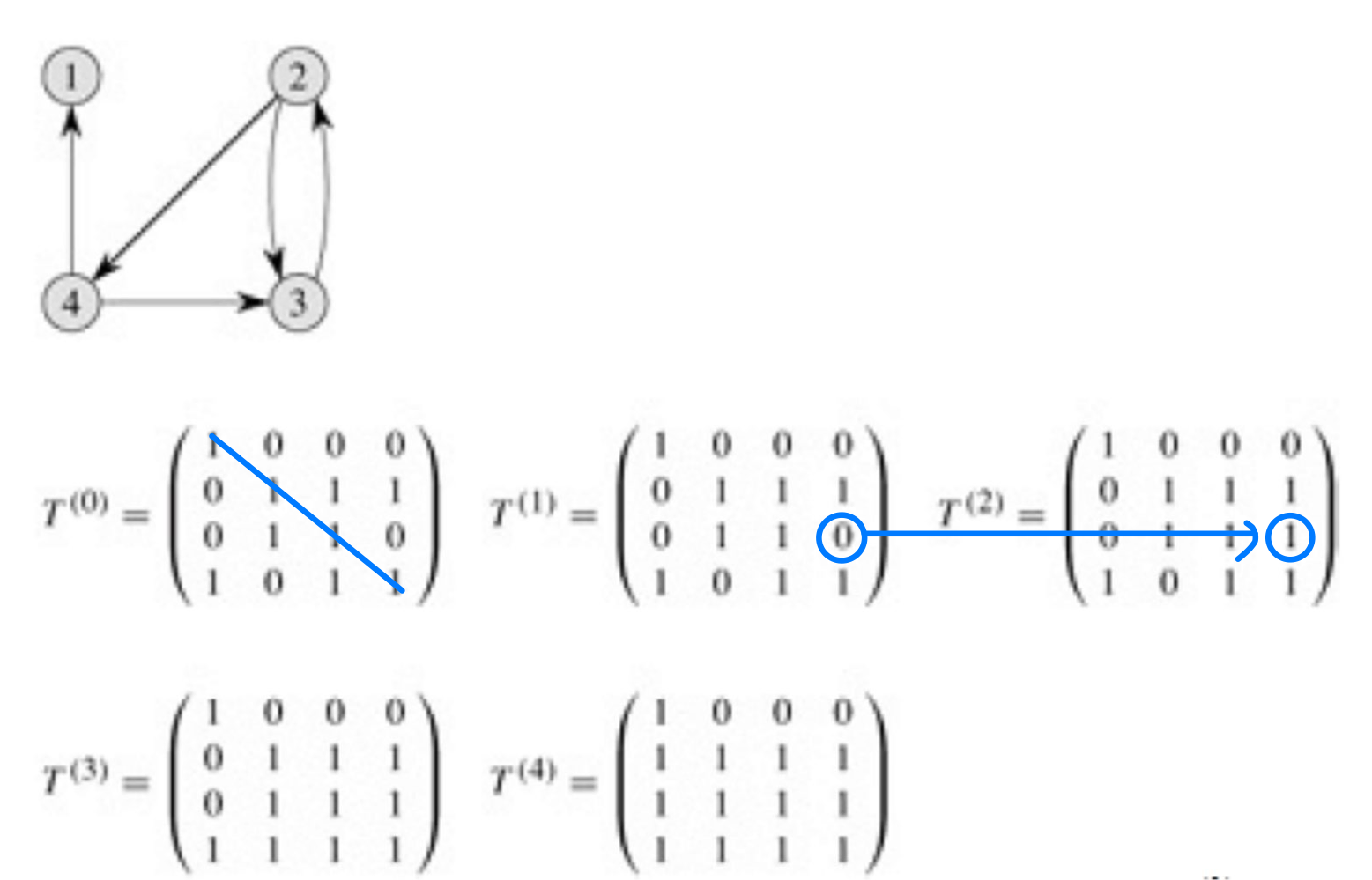
Transitive Closure
- Given directed graph G = (V, E)
- Compute G = (V, E)
- E = {(i, j) : there is path from i to j in G}
- Could assign weight of 1 to each edge, then run FLOYD-WARSHALL
- If d < n, then there is a path from i to j
- Otherwise, d = and there is no path
- Using logical operations OR, AND
- Assign weight of 1 to each edge, then run FLOYD-WARSHALL with this weights.
🖥️ Exercise in class
1. Dijkstra's algorithm
After vertex D is extracted from PQ and all edges incident from vertex D are relaxed, what is distance of B, C, E?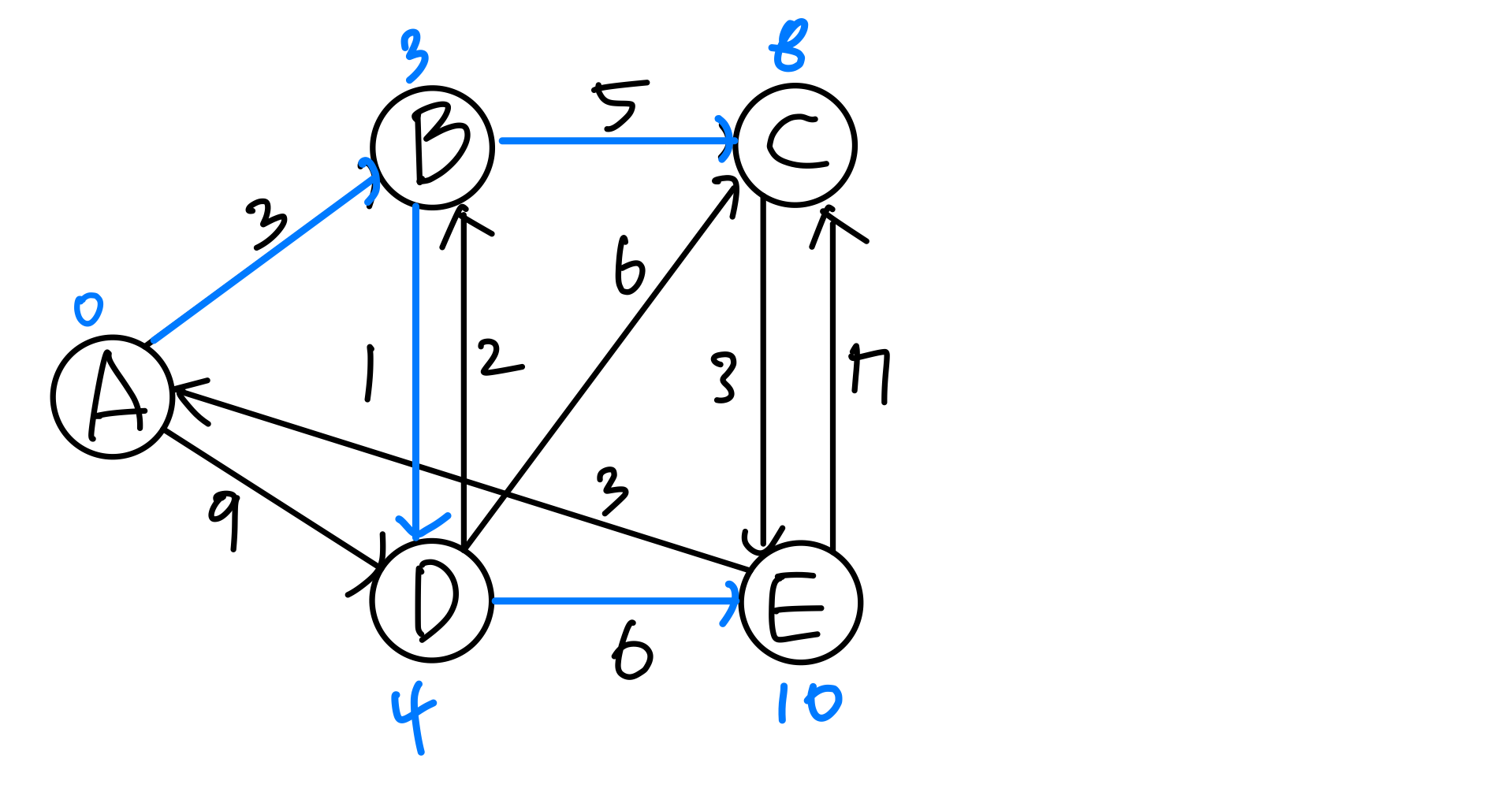 ➡️ B = 3(A), C = 8(B), E = 10(D)
➡️ B = 3(A), C = 8(B), E = 10(D)
2. Floyd's algorithm
→ DP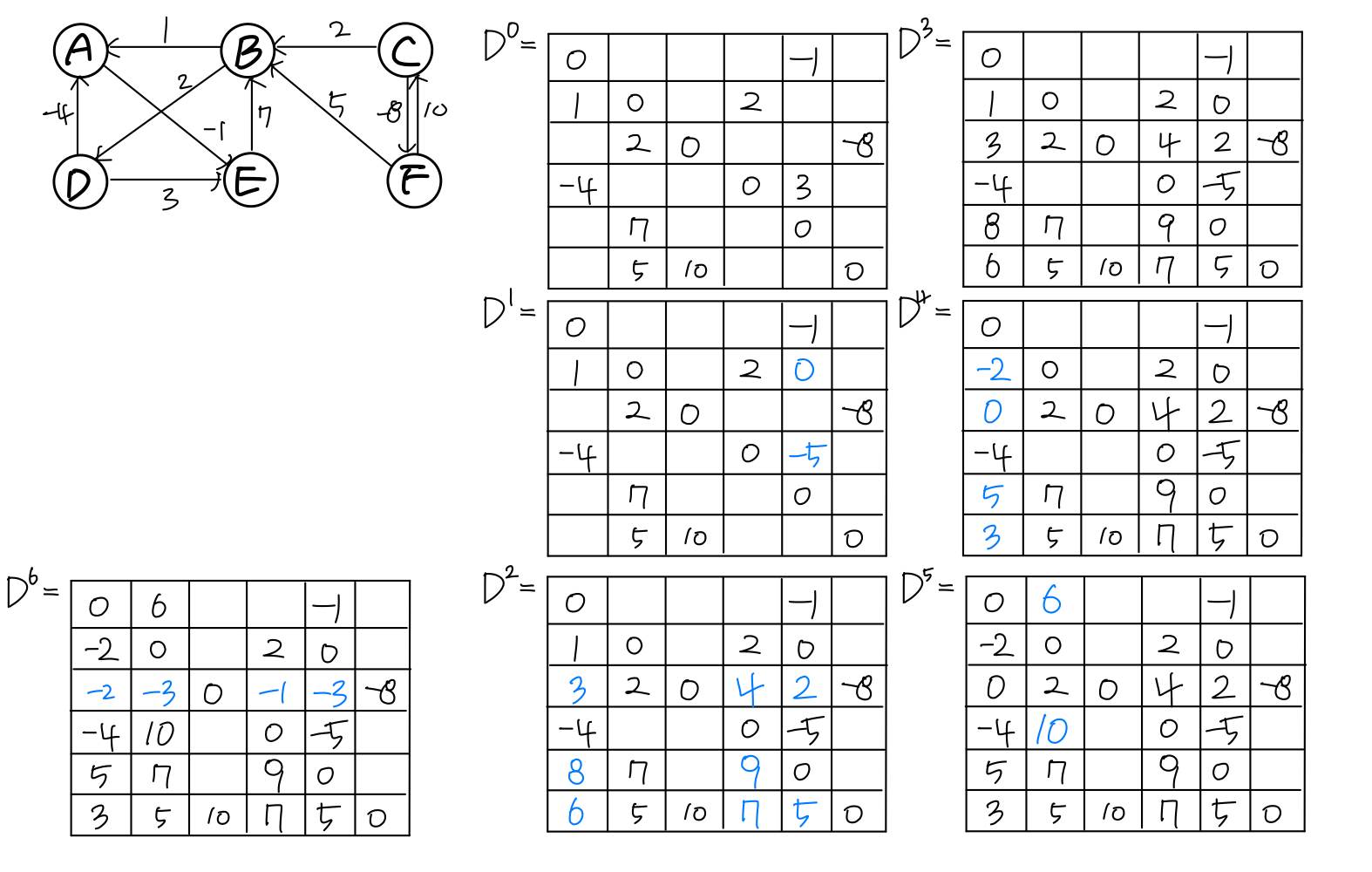
3. All pair shortest path
- SSP → All-pair
- Dijkstra : (V)
- Bellman-Ford : (V)
- Floyd : (V)
➡️ Time complexity 비슷, Why use Floyd?
A. It can deal with negative edge
HGU 전산전자공학부 용환기 교수님의 23-1 알고리듬 분석 수업을 듣고 작성한 포스트이며, 첨부한 모든 사진은 교수님 수업 PPT의 사진 원본에 필기를 한 수정본입니다.
