lec 05-2
Contents
- Cost
- Sigmoid problem
- New cost function for logistic
- understanding cost function
- Minimize cost - Gradient decent algorithm
ㅤ
ㅤ
ㅤ
ㅤ
Cost
- Hypothesis cost


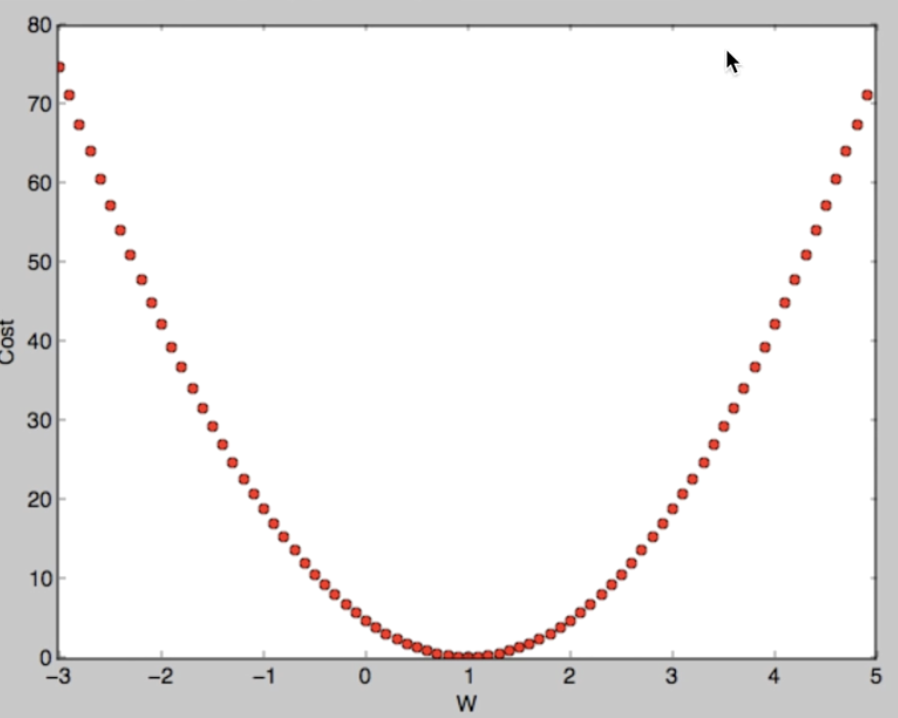
제곱 덕분에 매끄럽게 미끄러진다.
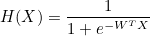
- Sigmoid cost

ㅤ
ㅤ
ㅤ
ㅤ
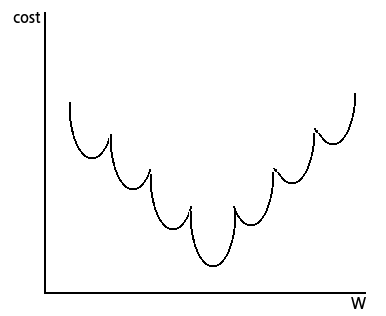
Sigmoid problem
결론부터 말하면 시작점에 따라 끝나는 점이 달라질 수 있기 때문에,
gradient descent을 사용할 때 Cost를 작게 만드는 W를 찾을 수 없다.

- local minimum = 한 구간에서의 최솟점
- global minimum = 모든 구간에서의 최솟점
ㅤ
ㅤ
ㅤ
ㅤ
New cost function for logistic
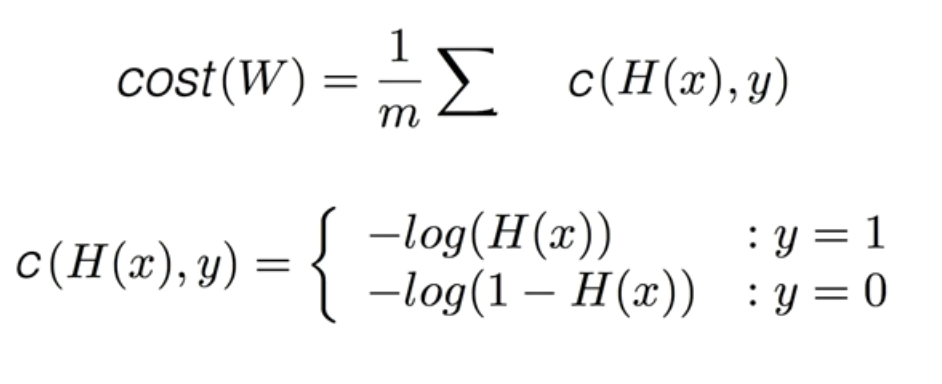
cost는 W에 대한 함수로, 모든 값의 합으로 평균을 낸 것이기에
부분은 변함이 없다.
또한 하나의 엘리먼트에 대한 cost를 c함수로 새로 정의된다.
ㅤ
ㅤ
c함수는 두 가지 케이스로 나누어 함수를 정의한다.
- y = 1

- y = 0

ㅤ
ㅤ
ㅤ
ㅤ
understanding cost function
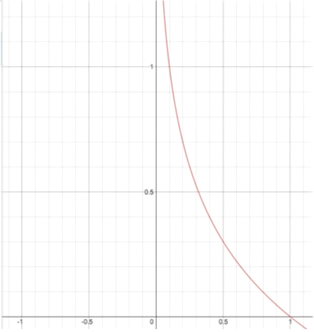
- y = 1

H(x) = 1 -> cost(1) = 0
H(x) = 0 -> cost = 무한
ㅤ
ㅤ
- y = 0

H(x) = 0 -> cost(1) = 0
H(x) = 1 -> cost = 무한
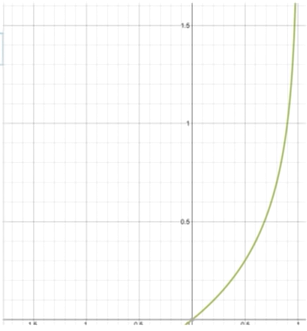
<예측이 틀리면 코스트가 굉장히 높아진다.>
ㅤ
ㅤ
위의 두 그래프를 합치면 경사 하강법을 할 수 있는 그래프가 만들어 진다.
또한, 두 식을 합쳐서 간단하게 만들 수 있다.

ㅤ
ㅤ
생각보다 간단하다.
예를 들면,


ㅤ
ㅤ
ㅤ
ㅤ
Minimize cost - Gradient decent algorithm
위에서 cost를 구했으니 아래와 같이 경사 하강법을 구할 수 있다.




꾸준히 꼼꼼히 오랫동안