
Games for AI: Movement
Movement
Movement algorithm structure
- 캐릭터 = 현재 포지션(velocity) + 물리적 특성
- 모든 움직임 알고리즘은 같은 기본형태를 띈다: own state, world state, geometric output
- 보통 velocity에 대한 출력이 기본임
- Kinematic movement: 캐릭터가 어떻게 가속(accelerate)하고 느려지는 것이 중요하지 않음(단순히 움직이는 방향만 따짐)
- Dynamic movement: 캐릭터의 현재 동작이 중요함(캐릭터의 velocity를 바꾸는 목표를 가진 힘이나 방향 = velocity)
Basics of Movement Algorithms
2차원 움직임
- 점에서의 캐릭터: 많은 움직임 알고리즘은 한 점에서 다루어질 수 있다.
- 충돌 방지, 장애물 회피와 다른 비슷한 알고리즘들은 캐릭터의 크기에 영향을 주지만 움직임은 캐릭터가 그 점에 있다고 판단함
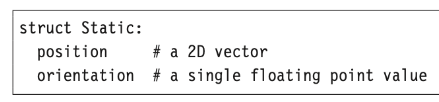
Statics
- 2차원 공간
- 2차원에서 x와 z축
- CCW angle, in radians, from the positive z-axis 사용
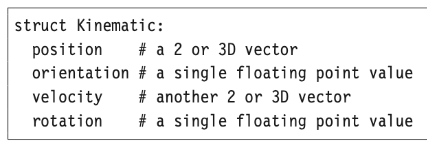
Kinematics
- 위치와 방향(orientation)만으로 목표 속도(velocity)를 계산하는 이동 알고리즘을 만들어 출력 속도를 즉시 변경할 수 있음
- Linear velocity: x, z 두 요소가, 축에서의 캐릭터의 속도
- Angular velocity: 캐릭터의 방향이 얼마나 빠르게 바뀌나(각 속도)
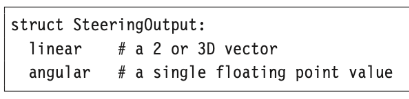
Steering behaviors
- 레벨 주변으로 캐릭터의 속도를 변경하려는 가속도 리턴
-
많은 프레임 = 부드러운 모션
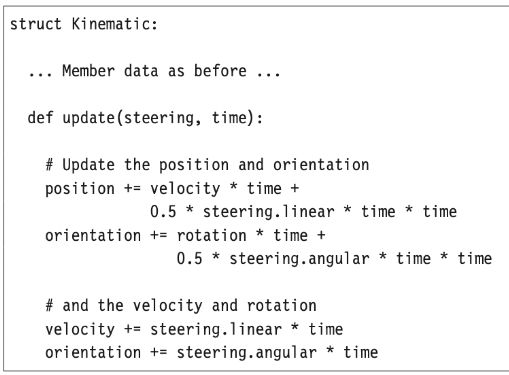
-
프레임 속도가 높을 수록, 이 함수가 통과되는 속도는 매우 짧다.(업데이트가 빠름)
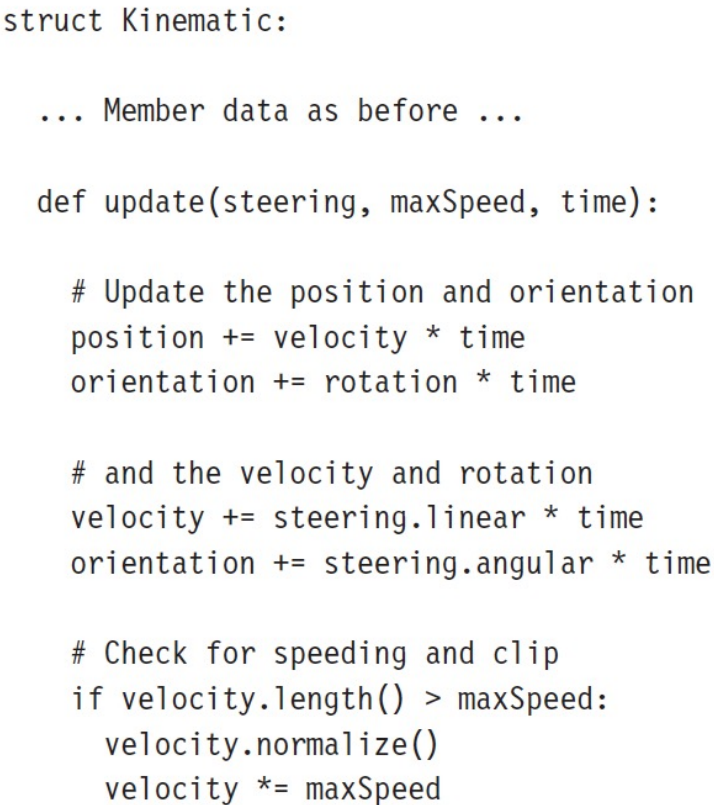
Kinematics Movement Algorithms
- static data 사용(위치+각도, 속도는 X)하고 velocity 출력
- Kinematic 알고리즘은 가속 사용 X
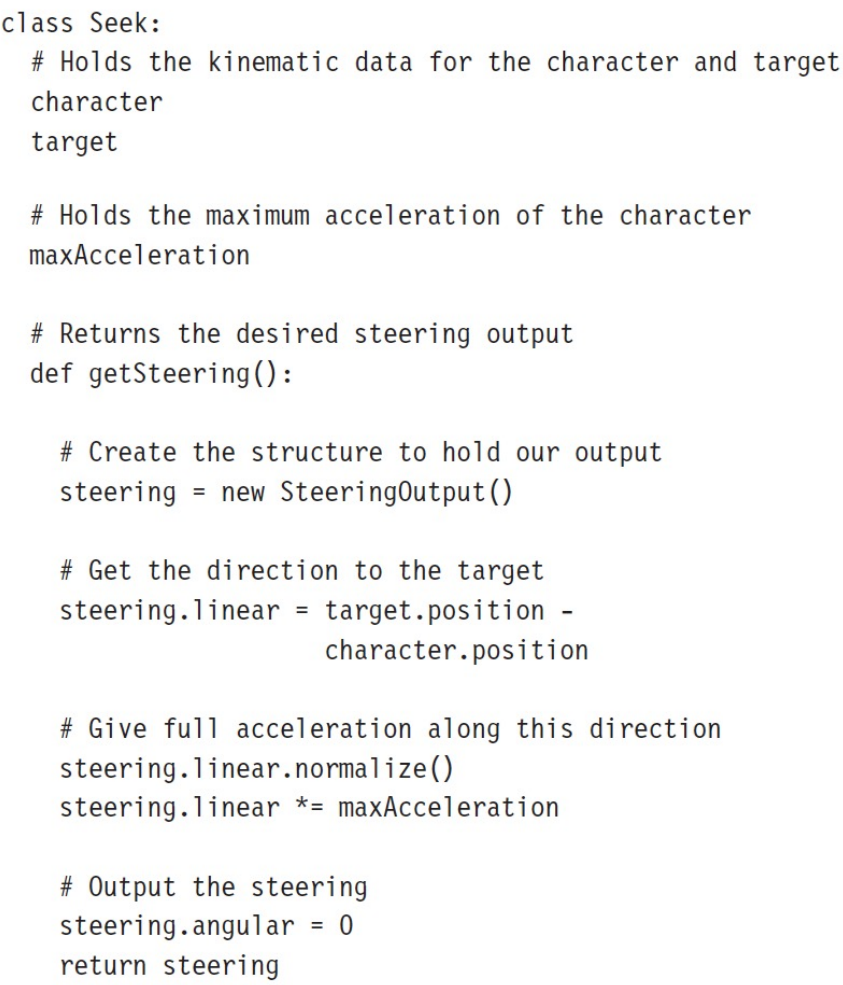
Seek
- Input: 캐릭터, 타겟의 static data
- 캐릭터 -> 타겟의 방향 계산 및 해당 경로 속도 요청
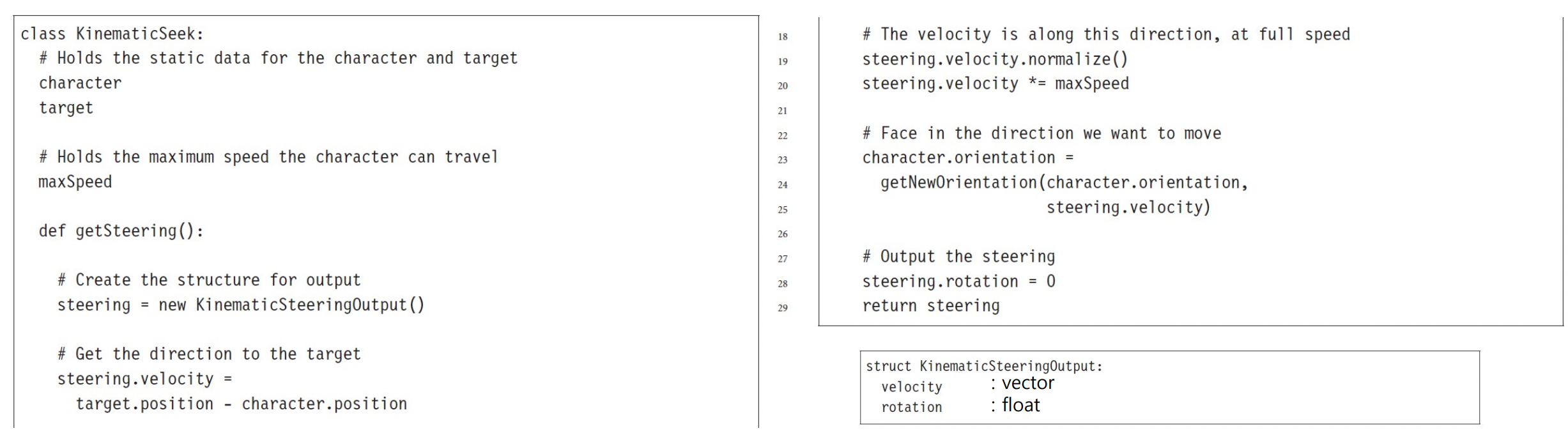
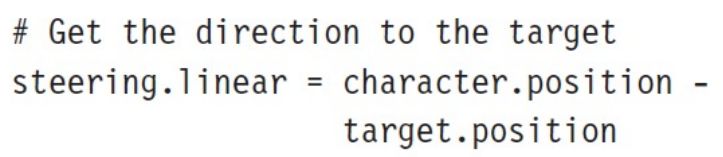
Flee
- Seek의 steering.velocity 방향만 반대로 바꿔주면 됨
Arriving
- 캐릭터가 게임 세계의 특정 지점으로 이동하는 경우 이 알고리즘은 문제 있을 수 있음
- 항상 Full speed로 움직이기 때문에 정확한 지점을 오버슈팅할 가능성이 높음
- 알고리즘에 큰 radius 범위를 준다
- 다양한 속도를 지원하면, 캐릭터의 속도를 늦츨 수 있음
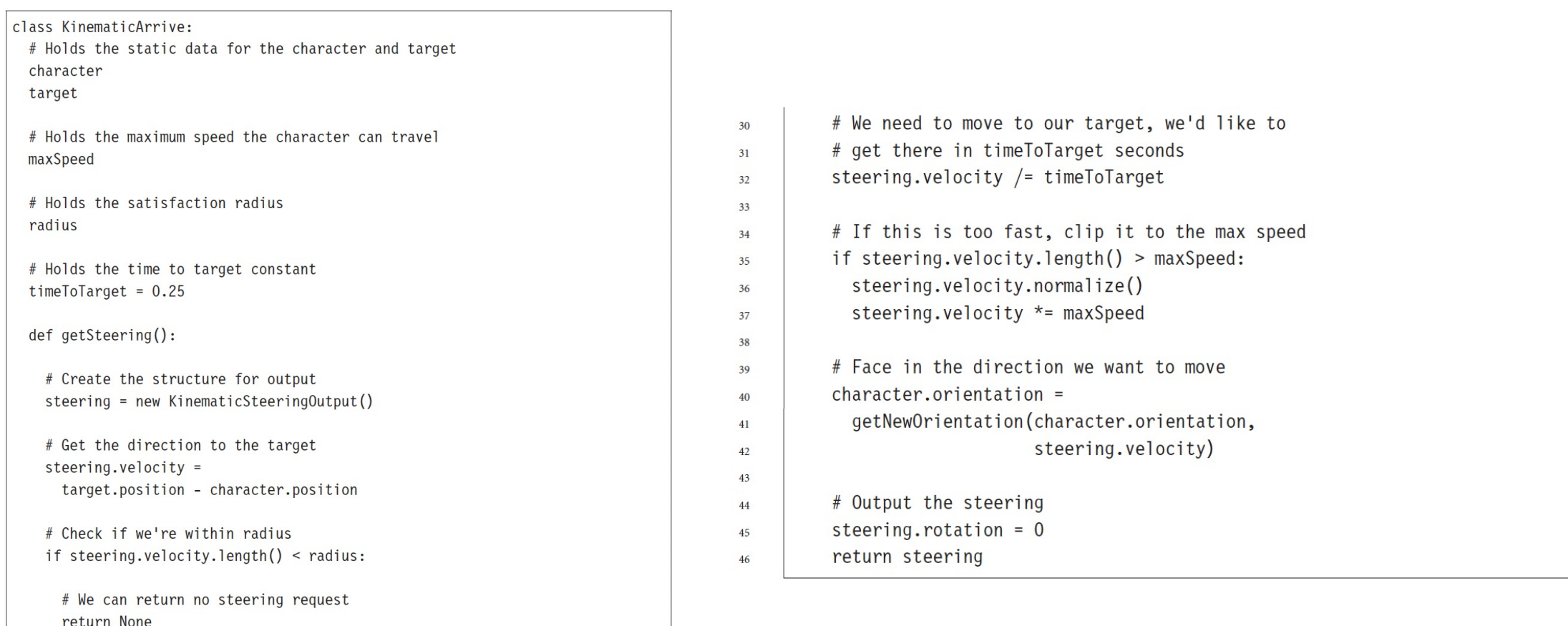
- 더 높은 값은 부드러운 감속, 낮은 값은 제동이 급격해짐
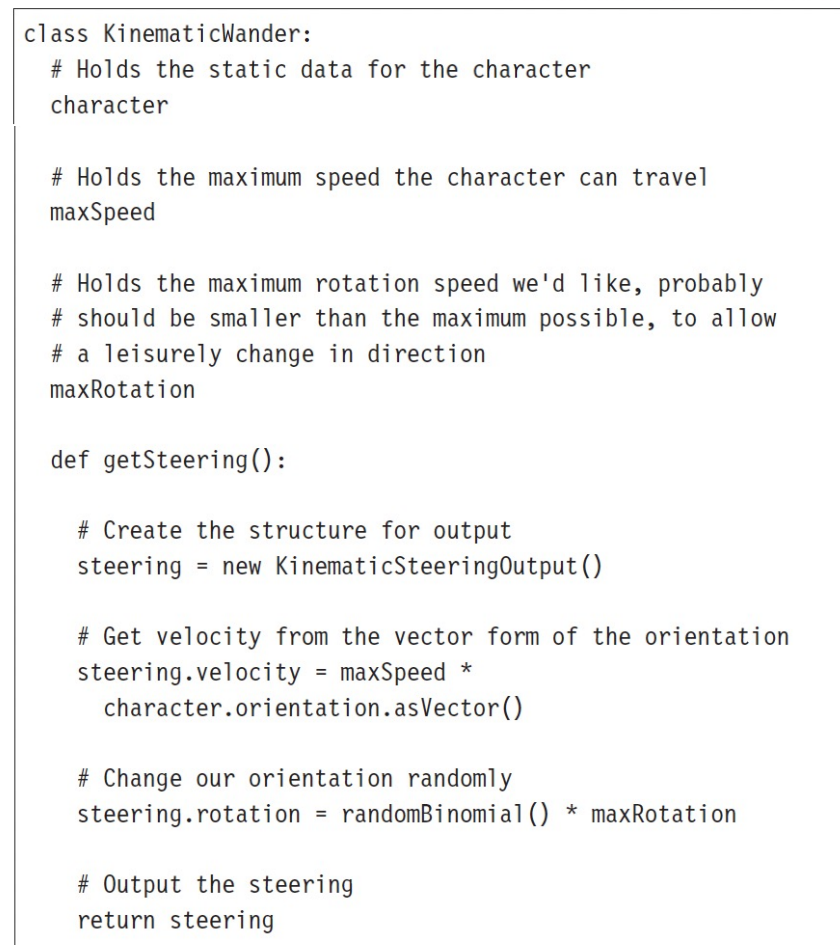
Wandering
- 운동학적 방황 거동은 항상 최대 속도로 캐릭터의 현재 방향으로 이동합니다
- 스티어링 동작은 캐릭터의 방향을 수정합니다
Steering Behaviors
- velocity와 rotation을 추가함으로써 이전 섹션의 움직임 알고리즘을 확장한다.
- 캐릭터의 키네마틱과 제한된 양의 타겟 정보 입력
Variable matching
- 하나 이상의 캐릭터 키네마틱 요소와 타겟 키네마틱 요소를 맞추자
- 키네마틱 두 가지 이상의 요소가 동시에 일치할 때?
- 각 요소에 대해 개별 맞춤 한 다음에 결합해서 한다
Seek and Flee
- 키네마틱 Seek 알고리즘에서는 정확히 타겟을 향한 방향을 찾고 가능한 빨리 목표를 향한다.
- steering output은 현재 가속이기 때문에 최대 가속될 수 있다
Arrive
- 탐색: 가능한 한 최대의 가속으로 항상 목표를 향해 나아갑니다
- 캐릭터가 목표물에 도착하면 오버슈팅됨
- 정확한 위치에 정확히 도착하도록 속도를 줄여야 함(키네마틱 도착 알고리즘)
Arrive(Dynamic)
- 두 개의 radii를 사용
- The arrival radii: 캐릭터를 대상에 가깝게 설정
- Second radii: 더 크고 들어오는 캐릭터는 이 반경을 통과할 때 느려질 것임
- 감속 반경에서 이는 최대 속도와 같습니다.
- 목표 지점에서는 0입니다(도착 시 속도가 0이 되길 원합니다).
- 그 사이에 원하는 속도는 보간된 중간 값으로 타겟과의 거리에 의해 제어됨
class Arrive:
# Kinematic 데이터(캐릭터, 타겟)
charater
target
# 캐릭터의 최대 가속력과 속도
maxAcceleration
maxSpeed
# 타겟에 도착하기 위한 범위(radius)
targetRadius
# 느려지기 시작하는 범위(radius)
slowRadius
# 타겟 속도에 도달하기 위한 시간
timeToTarget = 0.1
def getSteering(target):
steering = new SteeringOutput()
# 타겟까지의 방향
direction = target.position - character.position
distance = direction.length()
# 범위 내에 있으면 리턴x
if distance < tagetRadius:
return None
# slowRadius 밖에 있으면 최대 속도 출력
if distance > slowRadius:
targetSpeed = maxSpeed
# slowRadius 안에 있으면 속도 조절
else:
targetSpeed = maxSpeed * distance / slowRadius
# 타겟 velocity(속도와 방향 결합)
targetVelocity = direction
targetVelocity.normalize()
targetVelocity *= targetSpeed
# target velocity까지 가속 시도
steering.linear = targetVelocity - character.velocity
steering.linear /= timeToTarget
# 가속이 너무 빠르면
if steering.linear.length() > maxAcceleration:
steering.linear.normalize()
steering.linear *= maxAcceleration
# steering 출력
steering.angular = 0
return steeringAlign
- Align은 캐릭터의 방향을 target과 일치시키려 한다.(캐릭터나 타겟의 위치나 속도에 주의를 기울이진 않음)
- target 방향에 도달하기 위해 시도하고 도달하면 회전이 0이 되도록 한다.(arrive와 비슷하게 작동)
- 2pi 마다 반복되니깐 단순히 빼는 걸로 단순화 못 시킴 (-pi, pi)로 해야됨
Velocity matching
- 캐릭터가 target의 움직임을 모방하도록 사용될 수 있지만 유용하진 않음
- 다른 행동들을 결합하면 중요함(플로킹 스티어링 동작의 구성 요소 중 하나)
Wander
- kinematic 방황 행동, 방황 방향이 실행될 때마다 무작위 양으로 교란되었습니다(캐릭터의 회전이 불규칙합니다)
- target이 제한된 캐릭터 주변 원 내에 있다
- 행동이 실행될 때마다, 랜덤한 양만큼 원 주위로 조금씩 움직인다
- 그런 다음, 캐릭터는 타겟을 찾는다
Path following
- 타겟까지의 모든 경로를 가지는 조종 행동(Steering behavior)
- 현재 캐릭터의 위치와 경로의 모양을 기반으로 target의 위치를 계산한다
- target을 찾는 법
- 고정된 거리에 의한 맵의 점과 경로를 따라 가장 가까운 점을 찾음
- 짧은 시간 내 캐릭터가 있을 지점을 예측하고 1번을 반복한다(예측 경로 탐색)
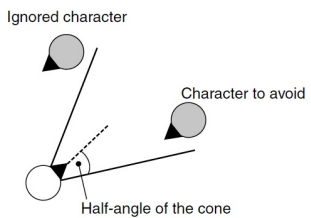
Collision avoidance
-
캐릭터는 다른 움직이는 캐릭터와 충돌을 피해야 함
-
'half-angle of the cone'을 이용하고 회피(evade) 또는 분리 동작을 한다
-
원뿔 내 다른 캐릭터들이 있으면?
- 원뿔 내 모든 캐릭터의 위치와 속도의 평균을 찾는다
- 가장 가까운 캐릭터만 고려하고 나머지는 무시한다
-
Panic
-
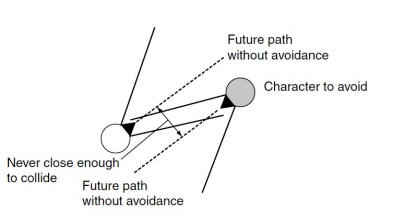
Evasive action
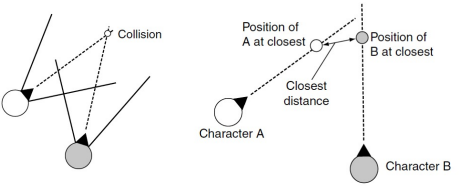
- 충돌 예측을 통해 충돌을 회피함
- 경로가 교차하는지는 판단할 수 없지만 가장 가까이 있는 순간을 찾고 분리를 유도함
Obastacle and wall avoidance
- 캐릭터는 움직이면서 해당 방향으로 하나 이상의 광선을 발사함
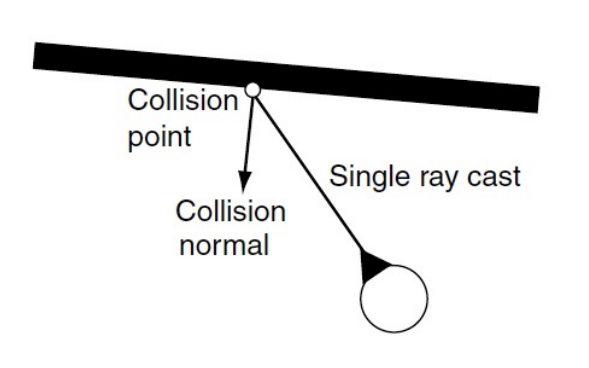
- ray cast로 충돌 지역 감지하면 collision point에서 수직인 collision normal(벡터)를 이용해 빠져나간다
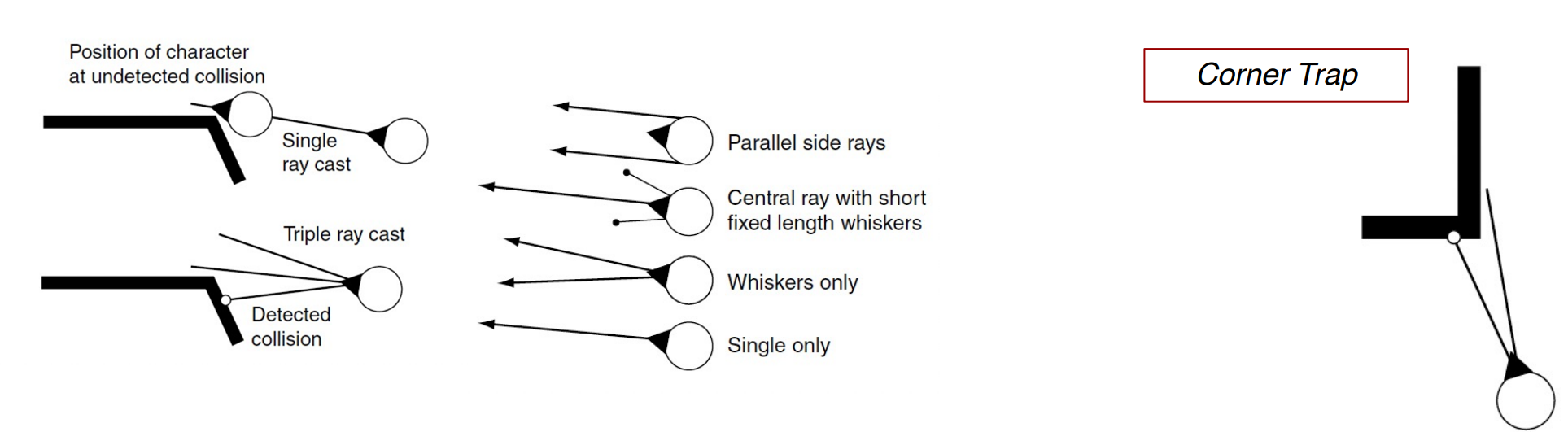
- 광선 하나 쓰는 건 별로임
- 근데 뭐가 낫고 좋은지 아직 기준이 없음
- 짧게 나가는 단일 광선이 초기 설정으론 좋은데 캐릭터가 좁은 통로를 따라 이동하는 것이 불가능할 수도 있음
- 평행으로 하면 모서리가 무딘 곳에서는 잘 작동하지만 뾰족한 곳에선 잘 작동을 못 함 = Corner Trap 현상
- 충분히 넓은 각을 지닌 부채꼴 모양으로 해결 가능
- 넓은 각 => 모서리 통과 가능
- 작은 각 => 작은 통로를 통과할 수 있음
- 각을 넓고 작게 조절하면서 적응형 각도를 만듦
- 특정한 corner trap 회피 코드 구현
Games for AI: Path Finding
Path Finding
- 어디로 이동할지 + 어떻게 이동할지
- 대부분의 게임은 A* 알고리즘 사용 -> 음수가 없는 가중치 그래프가 필요함
Path Finding Graph
- 그래프 형태로 표현, 단순화된 버전
- 단순화 과정에서 정보를 버리는데 이 정보가 중요할 수도 있음(단순화가 제대로 되지 않으면 최종 경로가 그다지 좋지 않을 수 있음)
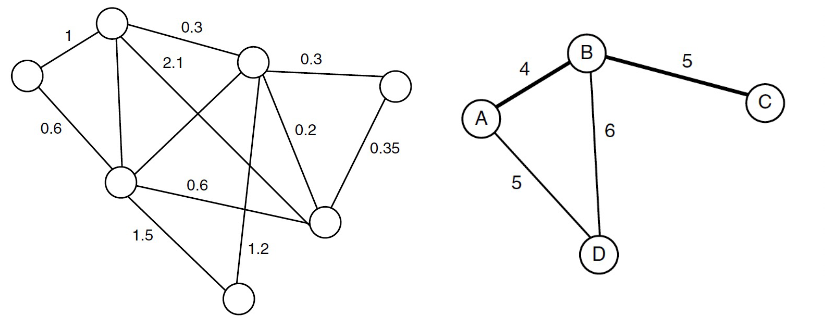
Graph
- 방향성 비음수 가중치 그래프를 사용한다
- 그래프에 점이나 원은 노드
- 노드끼리 선으로 연결되어 있음
- 그래프는 노드 집합과 연결 집합으로 구성된다, 연결은 정렬되지 않은 노드쌍
Weighted Graph
- 각 연결에 노드 쌍에 추가하여 수치 값을 추가한다
- 길찾기 그래프에서 비용은 시간이나 거리를 나타냄
- 최종 경로 비용: 경로에서 각 연결의 비용 합
비음수 제약조건
- 수학적 그래프 이론은 음수 가중치를 허용함
- 다익스트라와 A* 알고리즘은 비음수 가중치에만 사용 가능함
- 비용: 비음수 가중치
방향 가중 그래프
- 연결이 한 방향으로만 되어 있다고 가정
- 다음과 같은 상황에서 유리함
- A에서 B로 움직이는 능력이 A에서 B로 도달할 수 있다는 것을 항상 의미하는 것은 아님
- 다른 방향의 두 연결을 가지는 것은 두 개의 다른 비용이 있을 수 있다는 것을 의미
Dijkstra
- 게임에서 길찾기는 출발지점과 도착지점을 가질 때, 최단 경로 알고리즘은 초기 지점으로부터 어디로든 최단 경로를 찾을 수 있게 만들어짐
- 다익스트라는 주 경로 찾기 알고리즘 보다는 production 길찾기로 쓰임
문제점
- 두 노드가 하나 이상의 연결로 이루어져 있으면 각 연결마다 다른 비용을 가질 수 있음
진행 방식
- 다익스트라는 시작 노드의 연결을 따라 퍼져가는 식으로 작동
- 더 먼 노드들로 퍼져 나가면서, 자신이 온 방향을 기록한다
- 다익스트라는 퍼지는 과정을 조절하기 때문에, chalk arrow가 항상 시작까지의 최단 경로를 따라 뒤로 향하도록 보장?
- 다익스트라는 반복함
- 각 반복은 그래프의 한 노드를 고려하고 밖으로의 연결을 따름
- 반복에서 노드를 '현재 노드'라고 한다
current Node
- 반복 하는 동안, 다익스트라는 현재노드에서 밖으로의 연결을 고려함
- 각 연결은 끝 노드를 찾고 경로의 총비용("cost-so-far" = 현재까지의 비용)을 저장하고 거기로부터 도착한 연결을 저장함
Node list
- Open list: 보이는 모든 노드들을 기록하지만 아직 반복은 안 함
- Closed list: 처리된 노드들을 추적한다
- 각 노드들은 3가지 형태로 있음: closed, open, unvisited
- 반복 중, 알고리즘은 가장 작은 총 비용을 가진 open list의 노드를 선택함
- 그 후 처리된 노드는 open list에서 제거되고 closed list로 옮겨짐
총 비용(Cost-so-far)과 closed node는 어떻게 계산하나?
- 우리가 이미 찾은 경로보다 더 나은 경로를 찾았는지 확인함
- 새로운 총비용 값이 최근 총비용보다 작으면, 더 나은 값으로 바꾸고 연결을 기록한다. 그 후 노드는 open list에 옮겨둔다
- 이전에 closed list에 있었다면, 제거한다.
-> 다익스트라는 절대 closed node까지의 더 나은 경로를 찾을 수 없음
종료 조건
- 기본 다익스트라 알고리즘은 open list가 없을 때 종료된다
- 그래프의 모든 노드는 시작 노드로부터 도달되어야 하고 closed list에 모두 있어야 함
- 길찾기를 하는 동안, 오직 목표 노드 도달에만 관심있으므로 빨리 멈출 수도 있음
- 목표 노드가 open list에서 가장 작은 노드 일 때 종료되어야 함
목표를 찾은 즉시 종료하는 건 어떤가?
- 이 규칙은 종종 깨진다
- 목표에 도달하는 첫 경로는 매우 짧은 경우가 많으며 더 짧은 경로가 존재할 때도 조금만 길어짐
경로 검색
- 최종 단계는 경로를 검색하는 것
- 다시 돌아가서 해당 연결의 시작 노드를 보고 동일한 작업을 수행한다
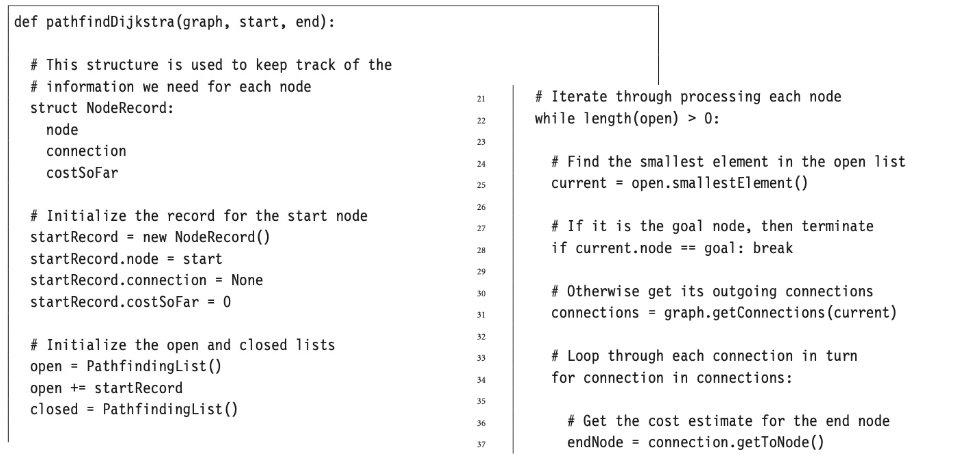
- smallElement() 메소드는 가장 작은 costSoFar 값을 가진 리스트에서 NodeRecord를 반환
- contains(node) 메소드는 파라미터에 동일한 NodeRecord가 포함되면 true
- find(node) 메소드는 파라미터와 동일한 목록에서 NodeRecord를 반환
한계
- 가능한 한 최단 경로를 찾아 그래프 전체를 무차별적으로 검색합니다
- 가능한 모든 노드들에 최단 경로를 찾을 때 유용하지만 점에서 점 경로 찾기에는 낭비
- 생성된 경로보다 먼 경로여도 계속 찾음
A*
- 다익스트라처럼 다 찾아야 하는 알고리즘은 점 대 점 경로 찾기에서 비효율적이며 거의 사용 안 됨
- 다익스트라보다 덜 채우는 방식
- 다익스트라와 달리 A*는 그래프 이론에서 최단경로를 찾는 것이 아니라 점 대 점 경로 찾기용으로 설계됨
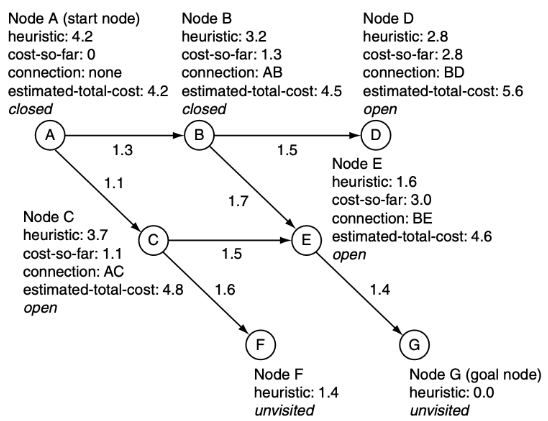
F = G + H
Estimated-total-cost = cost-so-far + heuristic
알고리즘
- 지금까지 가장 낮은 비용 값을 가진 개방형 노드를 항상 고려하는 대신 전체 경로가 가장 짧은 노드를 선택합니다
- 가능성이 가장 높은 개념은 heuristic
current Node
- 지금까지의 총 비용 저장
- 하나의 값을 더 저장: 시작 노드에서 현재 노드를 거쳐 목표로 가는 경로에 대한 총 비용 추정치
- 예상 총 비용: 지금까지의 비용과노드에서 목표까지의 (예상) 거리(=heuristic value)
Node list
- 이전과 달리 최소 예상 총 비용을 가진 오픈 리스트에서 노드는 각 반복에서 선택됨
- 거의 항상 최소 총 비용을 가진 노드와 다름
- 이러한 변경을 통해 알고리즘은 노드의 총 추정 비용이 작은 경우 보다 유망한 노드를 조사할 수 있으며, 추정 비용이 상대적으로 짧고 추정 거리가 상대적으로 짧아야 목표에 도달할 수 있습니다. 추정 값이 정확한 경우 목표에 더 가까운 노드를 먼저 고려하여 가장 수익성이 높은 영역으로 탐색을 좁힐 수 있습니다
cost-so-far
- cost-so-far 값에 대해서만 수행된다(예측 총 비용이 아니라)
- 다익스트라와 달리 A* 알고리즘은 closed list에 있는 노드에 대한 더 나은 경로를 찾기 가능
- closed list에서 노드를 제거하고 open list로 배치 가능
종료 조건
- open list에 있는 최소 노드가 목표노드일 때 종료
- 많은 수의 A* 구현은 목표 노드가 오픈 리스트에서 가장 작을 때까지 기다리지 않고 처음 방문했을 때 대신 종료됩니다
다익스트라와 비교
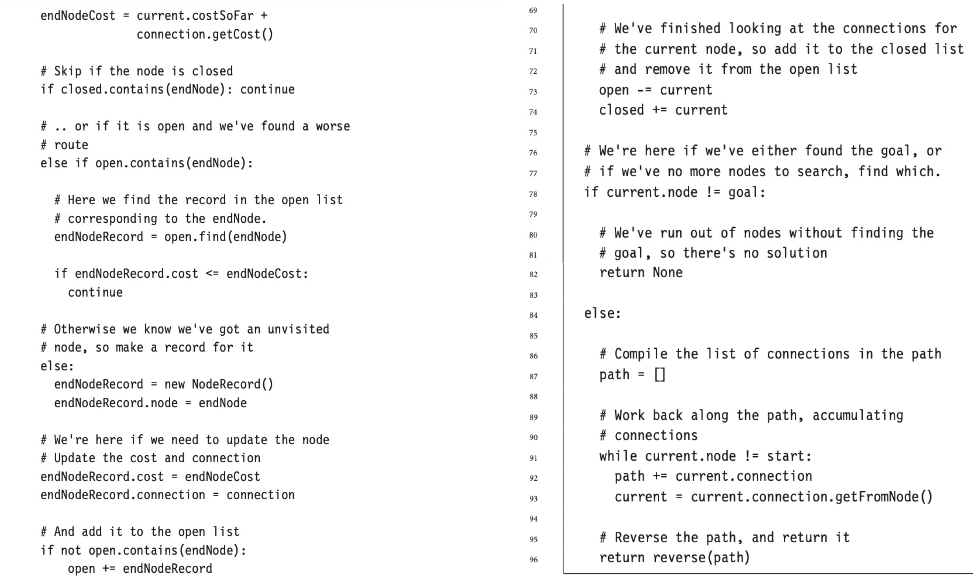
- closed node가 closed list에서 업데이트 및 제거가 필요한지 확인하기 위해 추가 검사를 추가합니다
- 또한 휴리스틱 함수를 사용하여 노드의 추정 총 비용을 계산하기 위해 두 줄을 추가하고 이 정보를 유지하기 위해 NodeRecord 구조에 추가 필드를 추가합니다
- 노드가 이미 휴리스틱을 계산한 경우 해당 값은 노드가 업데이트가 필요할 때 재사용됩니다
Heuristic
- 휴리스틱이 정확할수록 A*의 충전량이 감소하고 실행 속도가 빨라집니다
- 휴리스틱을 0으로 설정하면 Dijkstra임(A*에서 가중치가 0인 경우)
heuristic 과소평가
- heuristic이 너무 작아서 실제 경로 길이를 과소평가할 경우 A* 실행하는 데 더 오랜 시간이 걸립니다.
- F = G + H 중 G에 편향될 것임(지금까지의 거리)
- 시작 노드와 가까운 노드 위주로 선호하게 됨
- Dijkstra와 별반 다를 게 없어짐
heuristic 과대평가
- F = G + H 중 H에 편향된다.
- 노드 간 경로 비용이 최소가 아니더라도 거쳐가는 노드가 적은 경로를 선호함
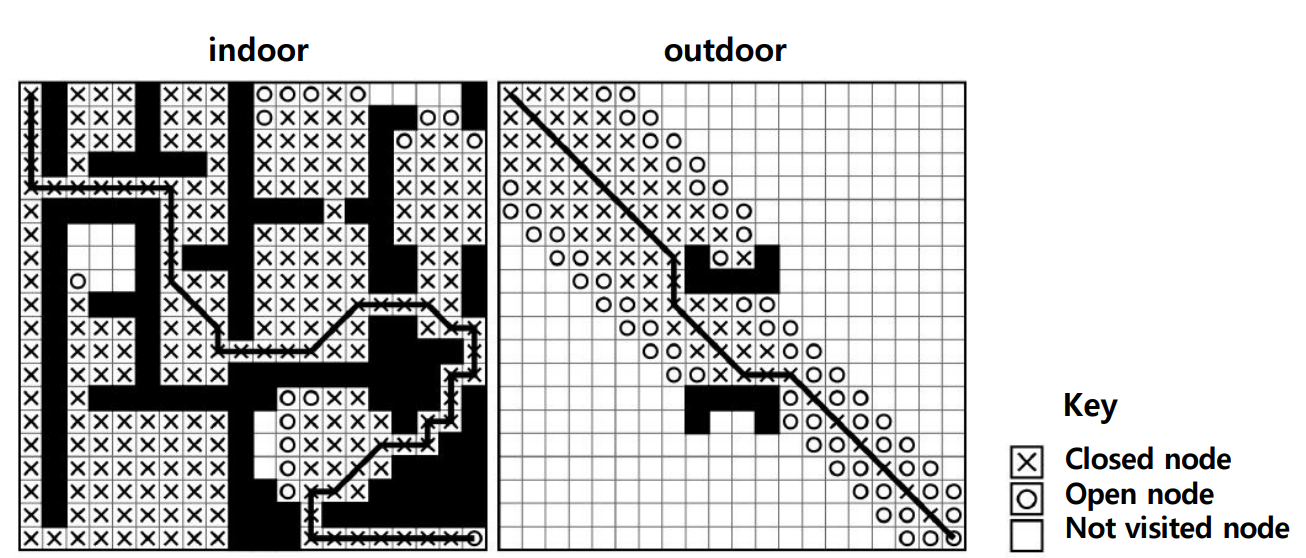
Euclidean Distance
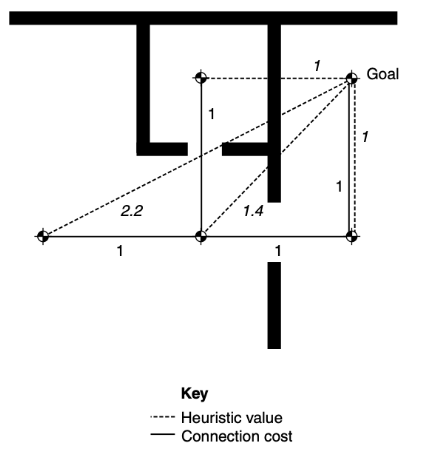
- 일반적으로 heuristic은 Euclidean Distance인데, 이거 사용하면 과소평가 당함.
- 유클리드 거리는 일직선임. 벽과 장애물 상관 안 함, 실제로 연결이 안 돼도 목표지점까지의 거리
- 유클리드 거리는 항상 정확하거나 과소평가된다
- 이동의 제약이 거의 없는 실외 환경에서는 유클리드 거리가 매우 정확하고 빠르다
- 유클리드 거리 휴리스틱을 사용하면 실내 레벨에선 가득 채우고 느림
- Outdoor에서는 적게 탐색하고 빠르다
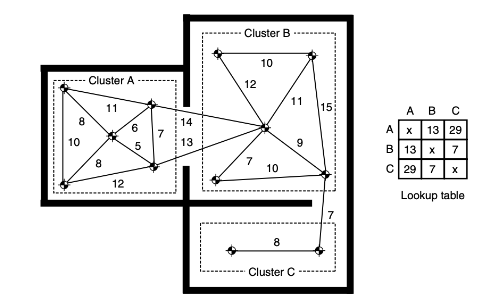
Cluster heuristic
- 클러스터 휴리스틱은 노드들을 클러스트 안에서 그룹화 함
- 그런 다음 각 클러스터 쌍 사이의 최단 경로를 제공하는 lookup table 생성. (여기까지 offline)
- 클러스터 휴리스틱은 유클리드 거리보다 실내 지역에서 경로 찾기 성능을 극적으로 향상시키는 경우가 많은데, 이는 겉으로 보기에는 가까운 위치를 연결하는 복잡한 경로를 고려함
- [주의]
- 클러스터의 모든 노드에 동일한 휴리스틱 값이 주어지기 때문에 A* 알고리즘은 클러스터를 통해 최적의 경로를 쉽게 찾을 수 없음
- 채우기 측면에서 볼 때, 알고리즘이 다음 클러스터로 이동하기 전에 클러스터가 거의 완전히 채워지는 경향이 있습니다
- 클러스터 크기가 작으면 이는 문제가 되지 않고 휴리스틱의 정확도가 우수할 수 있습니다.
- 반면 룩업 테이블이 클 것입니다(그리고 전처리 시간이 클 것입니다).
- 클러스터 크기가 너무 크면 성능이 한계될 것이고, 간단한 휴리스틱이 더 나음.
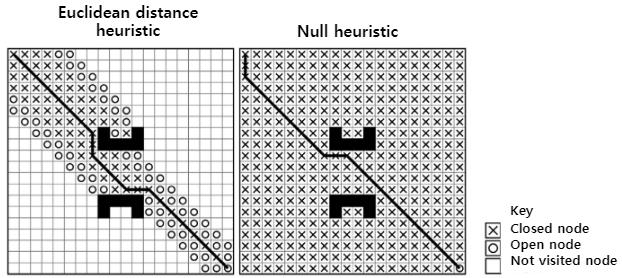
Fill Patterns
- 클러스터 휴리스틱은 거의 채워지지 않는 반면, 제로 휴리스틱은 대부분 채운다
- 이것은 knowledge vs. search trade-off의 좋은 예시임
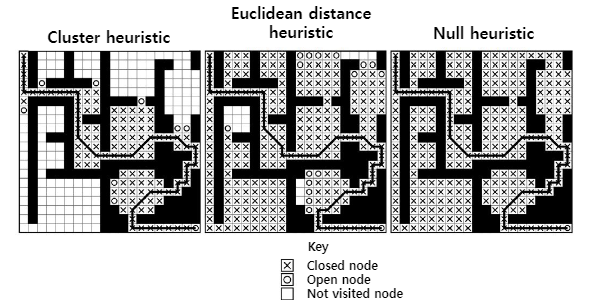
- 유클리드 거리는 약간의 지식을 제공합니다.(두 지점 간 이동 비용은 거리에 따라 다릅니다.) - 제로 휴리스틱은 지식이 없으며 많은 탐색이 필요합니다
- 즉, 아는 게 있으면 아는 대로 하고 아는 게 없으면 그만큼 탐색을 많이함
- 즉, 아는 게 있으면 아는 대로 하고 아는 게 없으면 그만큼 탐색을 많이함
- 장애물이 적은 outdoor에서는 유클리드 거리가 훨씬 정확합니다
- 유클리드 휴리스틱이 더 정확하고, 더 적게 채움
Trade-off
- 휴리스틱이 더 복잡하고 게임 레벨의 세부 사항에 맞춰진다면, A* 알고리즘은 탐색을 덜 해야 함(문제에 대한 많은 지식을 제공합니다)
- 이것의 궁극적인 확장은 궁극적인 지식을 가진 휴리스틱입니다: 완전히 정확한 추정치입니다
- 즉, 추정치가 정확하면(= 아는 게 많으면) 탐색을 덜 하면서 효율적으로 탐색 가능함
Dijkstar is A*
- Dijkstra 알고리즘은 A* 알고리즘의 부분 집합입니다
A*에서 휴리스틱 값을 cost-so-far까지A*에 추가하여 노드의 예측 총 비용을 계산- F = G+H
- 휴리스틱이 0인 경우 Dijkstra

공부 노트