1. 제어의 4가지 쟁점
- stability(안정성) : 시스템이 입출력 간의 관계에서 안정한 가
- Tracking : 출력이 기준 입력을 잘 쫓아가는 가
- Regulation : 상수 기준 입력이 들어왔을 때 외란이 있어도 출력이 상수로 나오는 가
- disturbance rejection : 외란에 대한 영향을 최대한 줄이는 것
- Sensitivity : 시스템이 바뀔 때 전달함수가 어떻게 바뀌는 가
2. Open-loop control vs Closed-loop control
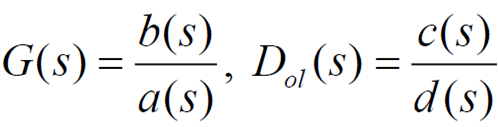
2-1. Open-loop control system
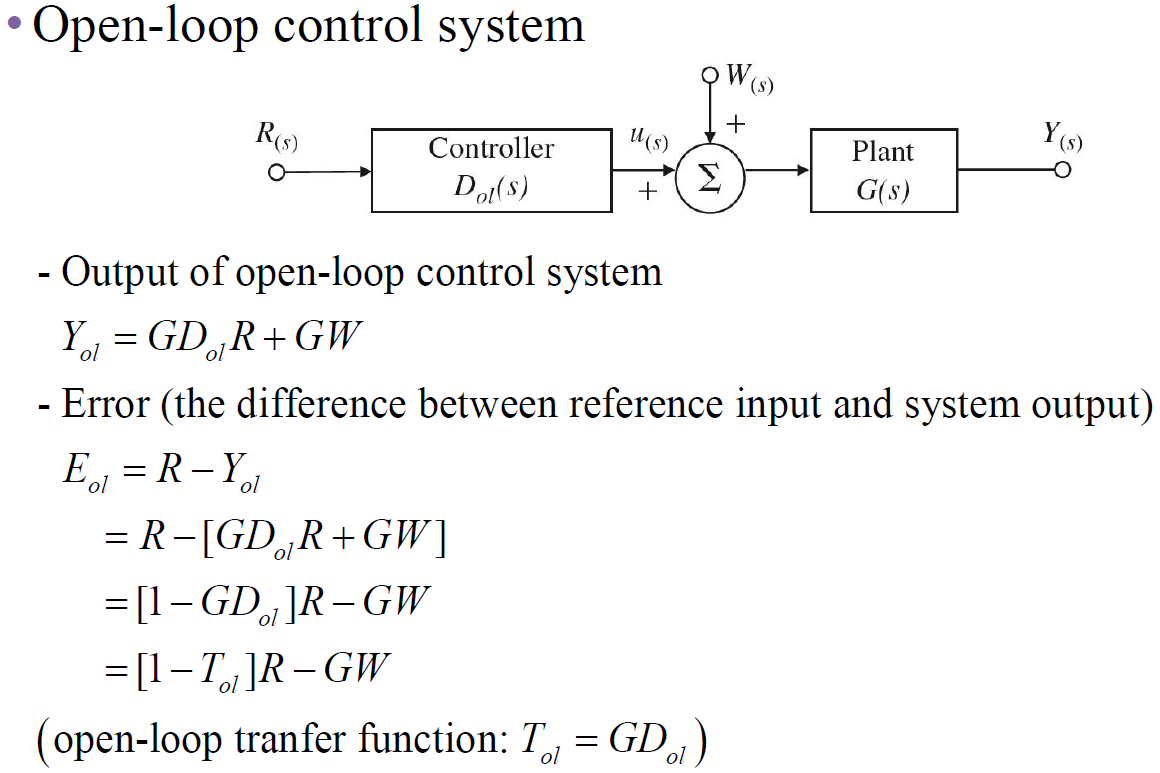
- 시스템이 stable하려면 가 다 stable 해야 한다.
의 근 : 음수
- open-loop는 unstable한 plant를 controller를 통해 stable한 전달함수로 변환 불가능
- controller 가 에 대응 불가
2-2. Feedback loop system
- : 출력이 따라가야 하는 레퍼런스 입력
- : 외란
- : 센서 노이즈
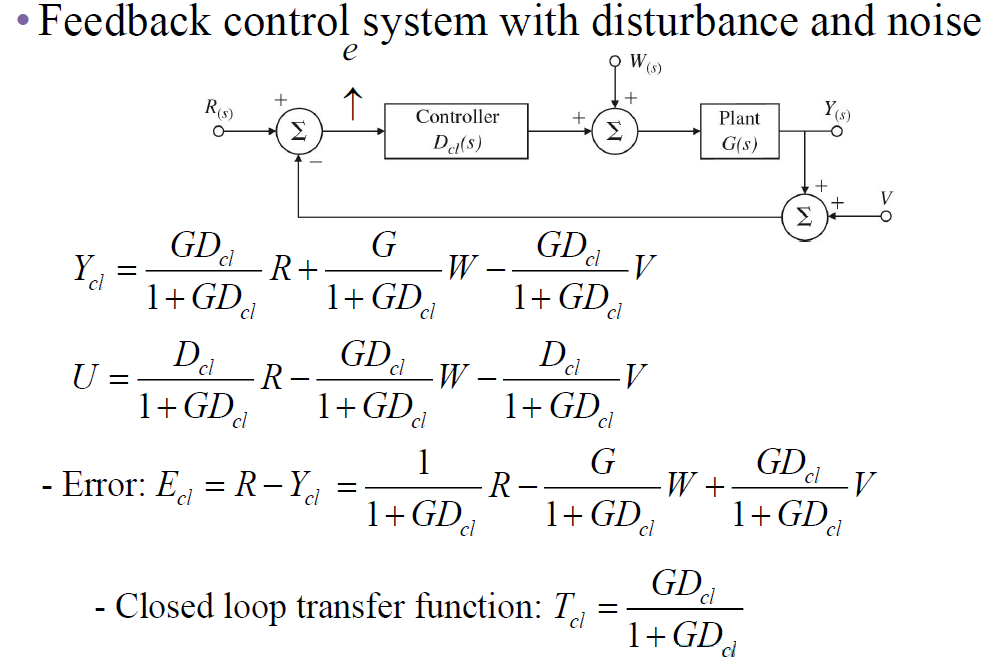

unstable한 plant를 controller를 통해 stable한 전달함수로 변환 가능
ex)
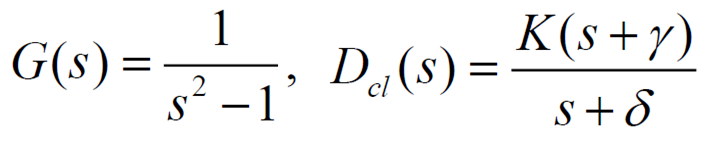
- : unstable plant
이렇게 unstable한 plant를 controller를 통해 stable한 전달함수로 변환 가능
두 경우 모두 unstable pole을 pole-zero cancellation으로 지우는 방법은 지양
(시스템을 정확히 파악할 수 없는데 시스템을 건드리는 행위)
3. Regulation
- 출력이 레퍼런스 입력을 잘 따라가는 것을 희망 => Error = 0에 가깝도록
3-1. open-loop

Error는 작아져도 외란을 제어 불가
3-2. closed-loop

이 크면 Error 조절하여 크기 조절 가능 + 외란 크기 조절 가능
가 너무 크면 (노이즈)가 그대로 반영
- (외란)은 보통 저주파, (노이즈)는 보통 고주파 주파수영역에 따라 값 조절하여 외란 or 노이즈 감소, (reference input)또한 보통 저주파
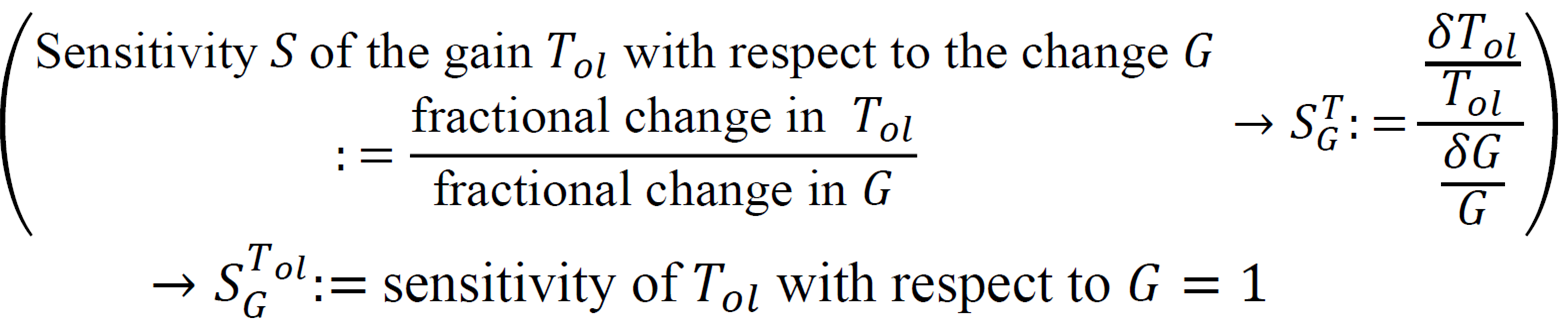
4. Sensitivity
- (plant)에 변화가 있을 때 전체 시스템의 전달함수에 발생하는 변화
Sensitivity :
4-1. open-loop
- controller 변화 x
4-2. closed-loop

(controller)로 stability 조정 가능

와 를 둘다 줄이는 건 불가능
- 앞서 말했듯이 (외란)은 보통 저주파, (노이즈)는 고주파
저주파 영역 고주파 영역
