1. Tracking
- 원하는 시간에 출력이 레퍼런스 입력을 잘 따라 가는 것
- controller : 분모 차수 >= 분자차수 (분자 차수가 더 커지면 미분형태가 되는데 미분을 피하기 위해)
- controller가 plant를 cancellation되게 하는 경우는 지양
출력이 레퍼런스 입력을 잘 따라가는 closed-loop 에 관심을 둘 것이다.
1-1. System Type, Reference tracking (외란, 노이즈 고려 x)
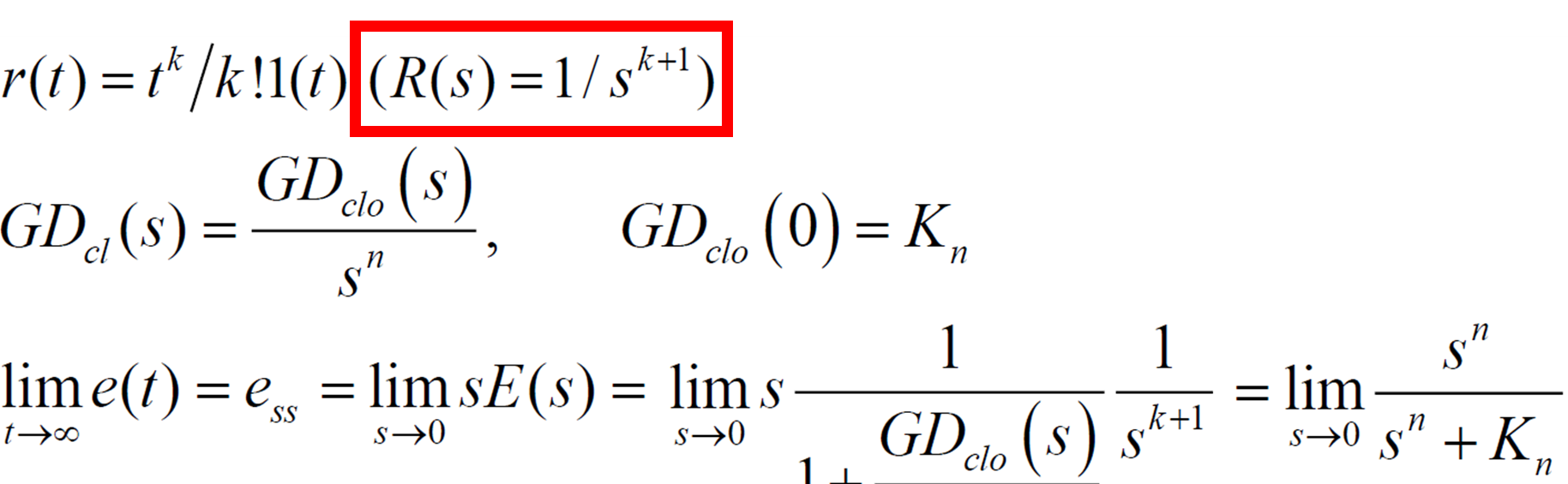
- 정상상태일 때 일정한 오차가 있도록 출력이 레퍼런스 입력을 따라가는 정도
- Type n 시스템 : 이 원점에 존재하는 pole을 n개 가짐
Type n 시스템의 ess는 다음과 같다.

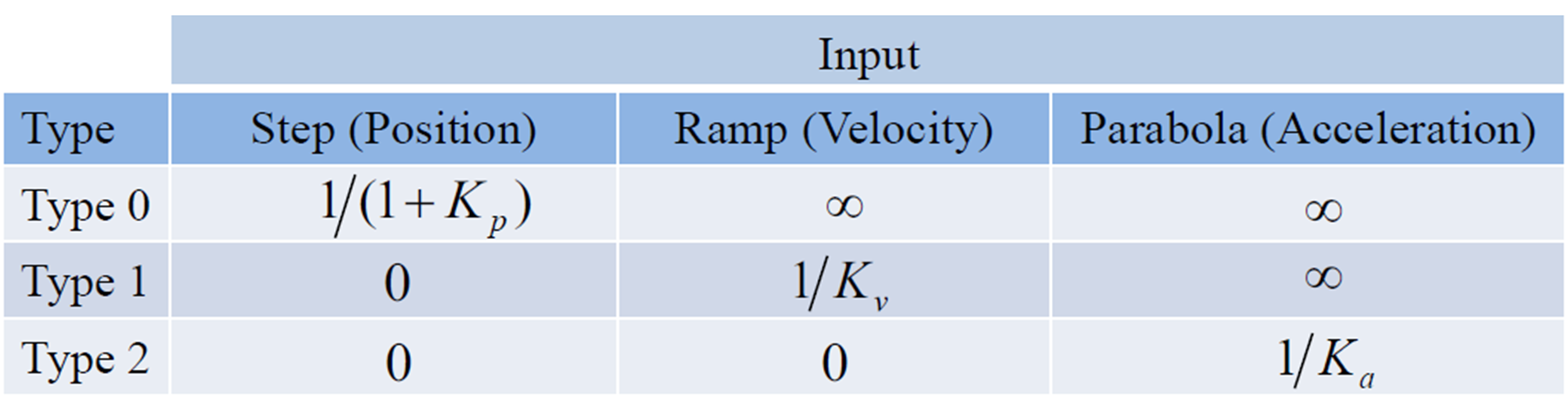
Type n 시스템에서 n이 입력 의 보다 크면 ess는 0, 같으면 특정 오차 값, 작으면
그래서 정리하면 다음과 같다.
ex) Speed control(입력 = ) with PI control,

, 원점 pole : 1개 n=1

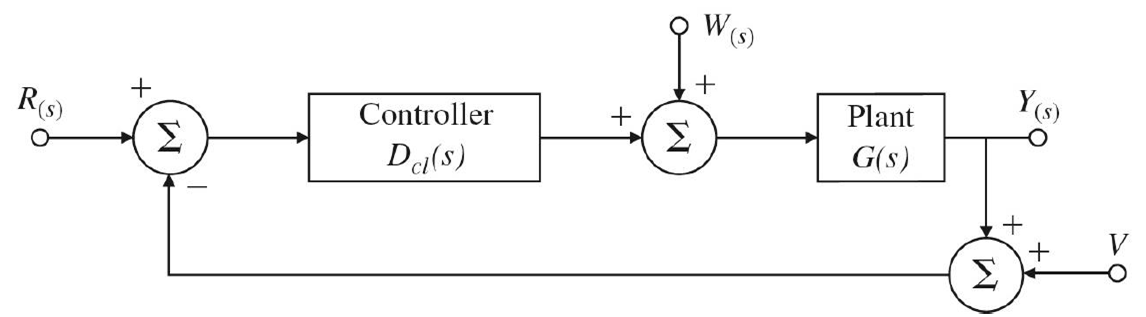
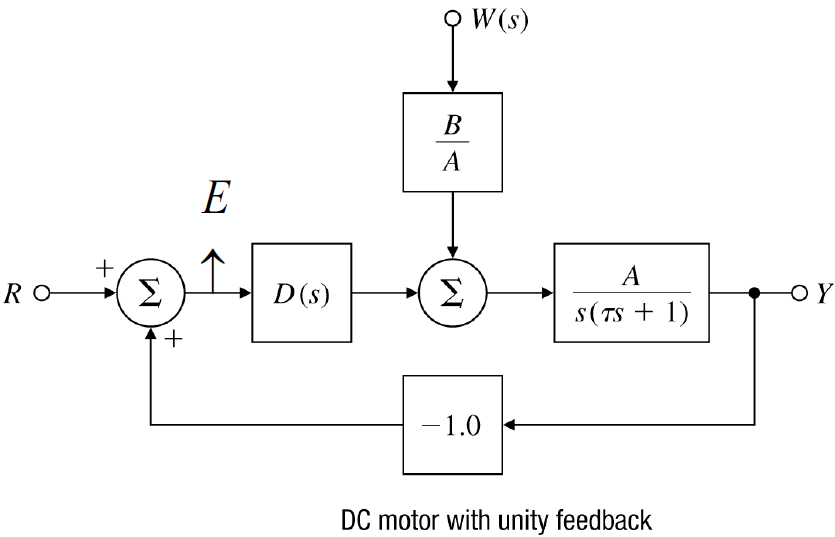
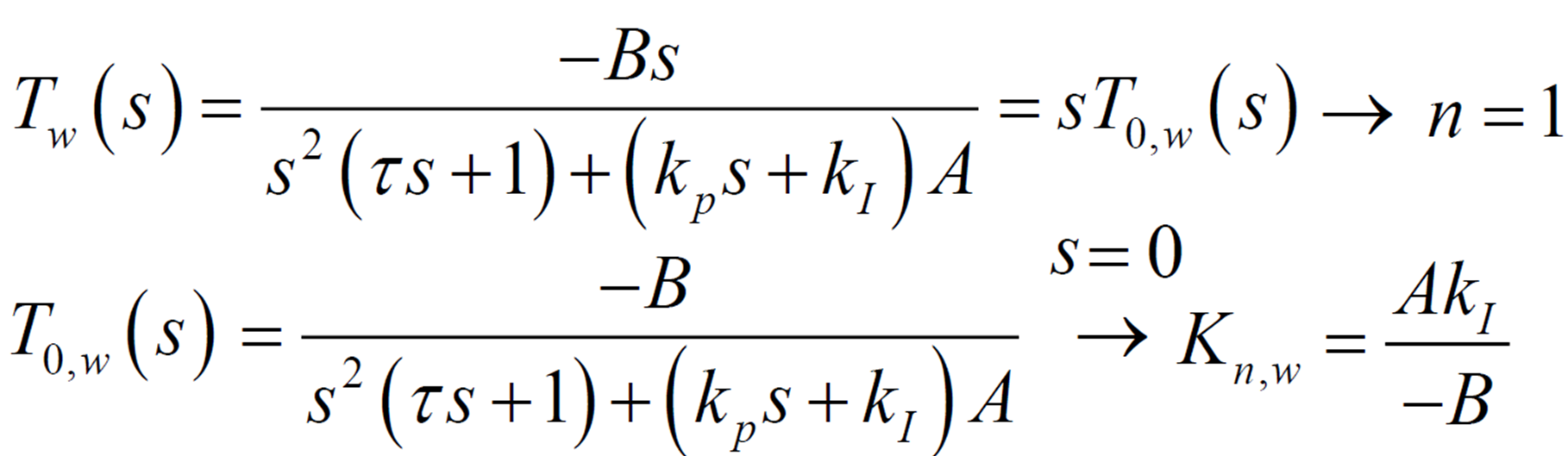
1-2. System Type, Disturbance Rejection (레퍼런스 입력, 노이즈고려 x)
- 외란만 들어왔을 때 시스템이 어떻게 반응할 것인가
- Reference tracking과 달리 (제어기)의 원점 pole의 개수만 중요


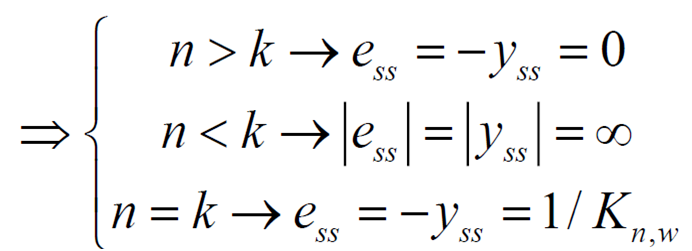
Reference Tracking과 유사함을 알 수 있다.
ex) PI control (k=1)
- PI control :
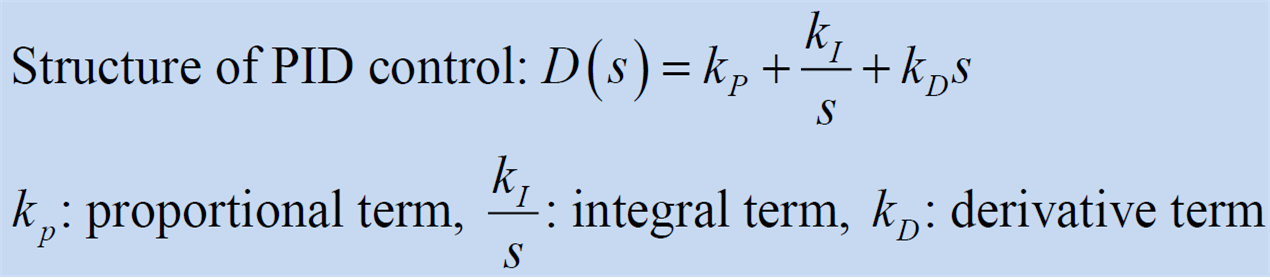
2. PID 제어기
- 비례(P), 적분(I), 미분(D) 텀을 사용한 제어기
- P : 현재 error가 큰지 작은지
- I : 현재 error가 얼마나 누적되었는지
- D : error가 점점 커지는지 작아지는지
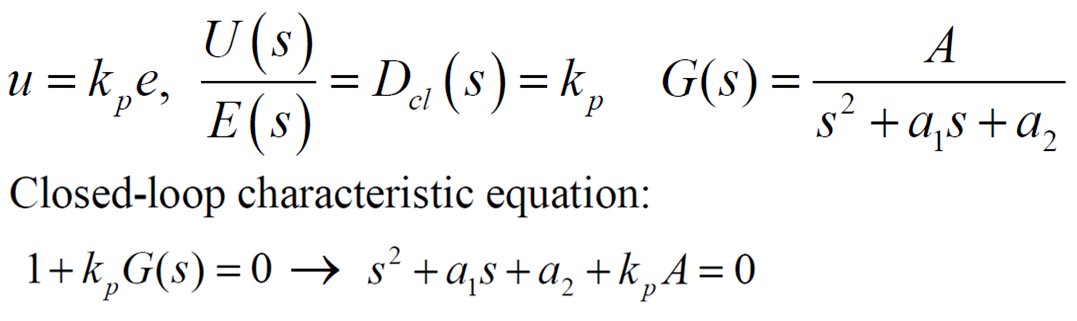
2-1. P control
rise time , 진폭
ex) speed control with the second order plant

로 특성방정식의 계수 조절 가능해 pole 위치 제어 가능
2-2. Ziegler-Nichols Tuning of the PID controller
- 일반적인 상황에서는 모델 모름 -> Gain 설정 문제
Ziegler-Nichols Tuning이 적절한 Gain 추천 : 가이드라인
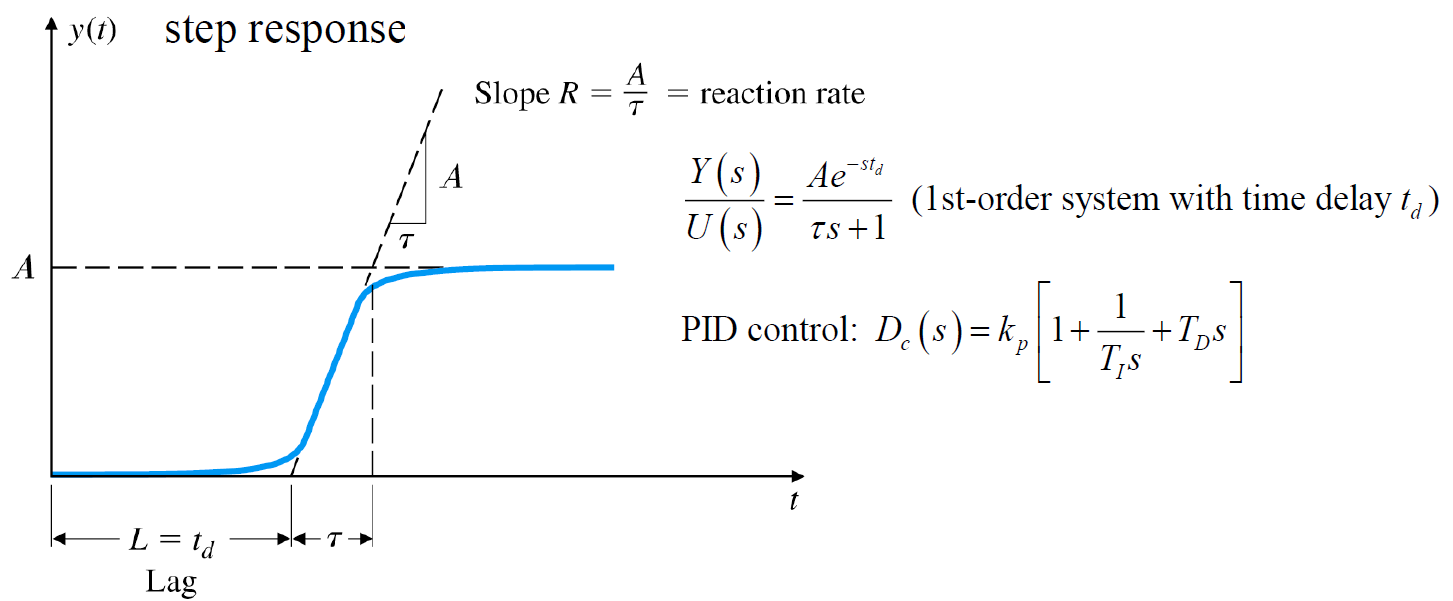
2-2-1. 첫 번째 방법
- step response를 통해 도출
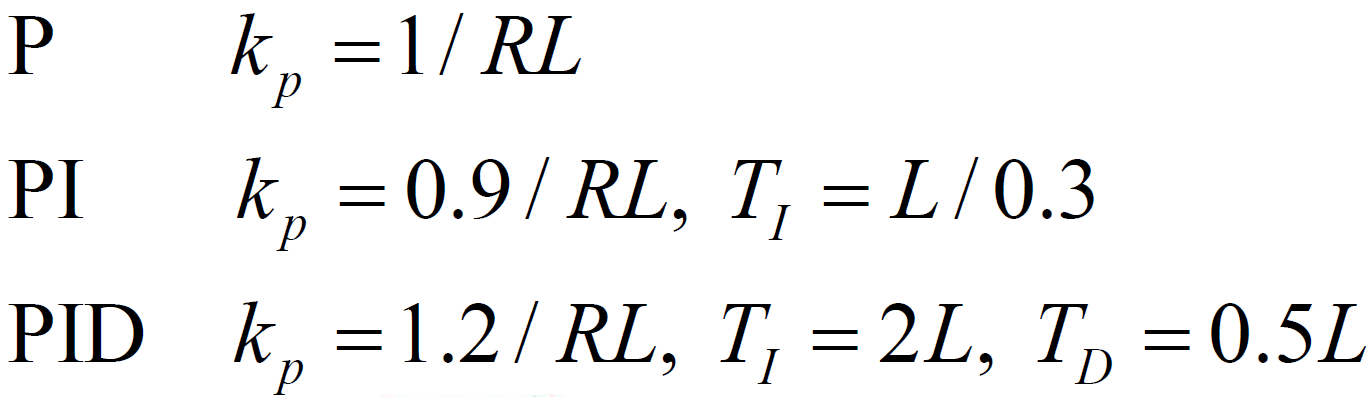
을 통해 값 쉽게 구하는 것 가능
2-2-2. 두 번째 방법 (Ultimate sensitivity method)
- 시스템의 P gain 높아져 불안정해질 때 적합
- : Ultimate gain, 시스템이 불안정(진동)하기 시작하는 P gain
- : Ultimate period, 시스템이 불안정하기 시작할 때의 출력 진동의 주기
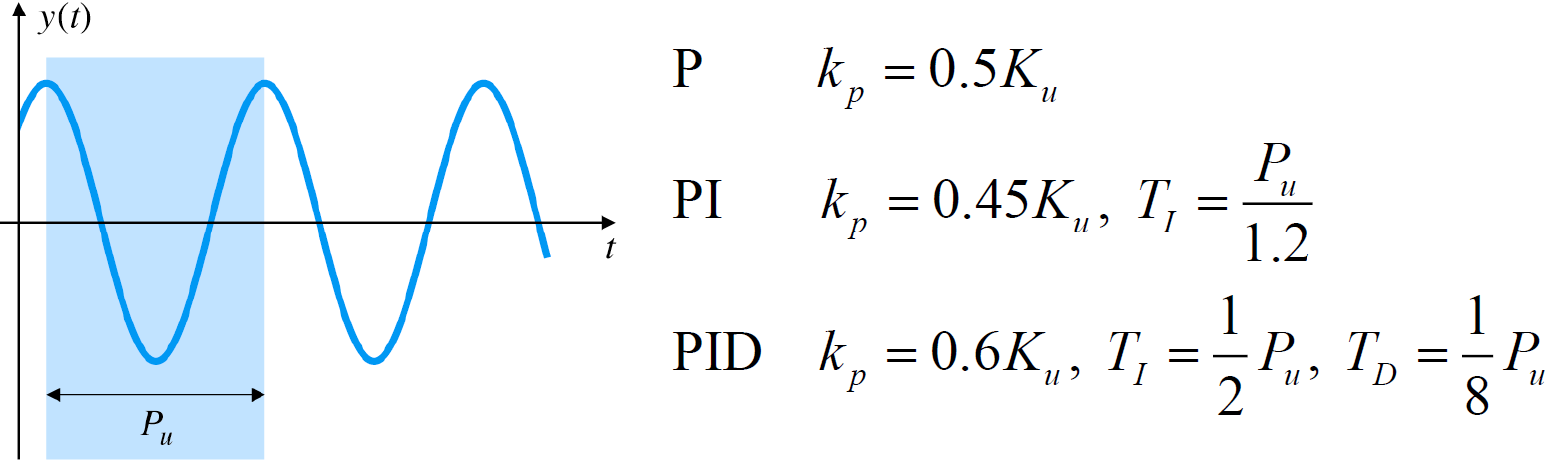
를 통해 값 쉽게 구하는 것 가능
