
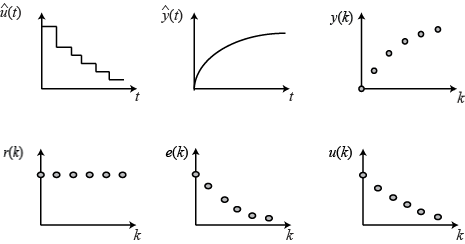
우리가 단순히 계산만 하여 제어공학 이론을 공부한 것과는 다르게 실무에서는 (micro controller)와 같은 디지털 제어 장치에 의존하여 제어를 하게 됩니다. 따라서 analog 값을 그대로 읽지 못하고 Converter와 같은 부품을 이용하여 디지털 장치가 이해할 수 있는 discrete한 형태로(그림 아랫줄 참고) 데이터를 받아들이게 됩니다.
이 경우에는 기존에 Laplace-Transform을 기반으로 한 주파수 해석과는 조금 달라지게 되는데, 이러한 문제를 해결할 수 있는 z-transform에 대하여 배워 보겠습니다.
Zero order hold equivalent (zoh)
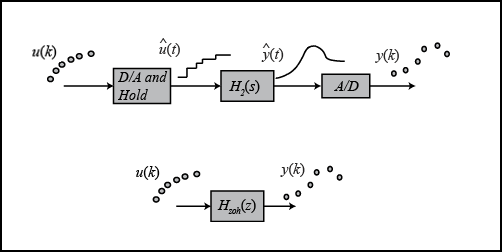
에서 처리하는 데이터는 와 같이 discrete한 데이터입니다. 점과 점 사이의 값을 알 수 없기 때문에 상수값으로 근사하여 와 같은 형태로 만듦니다.
이를 Zero order hold equivalent라고 합니다.
와 사이의 시간 간격을 sampling time이라고 합니다. 물론 짧을 수록 성능이 좋아지겠지만, 그만큼 연산이 많아지기 때문에 trade-off가 존재합니다.
matlab에서는 c2d(continuous to digital) 함수를 통하여 쉽게 연속 전달 함수를 이산 전달 함수로 바꿀 수 있습니다.
s = tf('s');
G = 40/s/(s+2);
c2d(G, 0.01, 'zoh') % c2d(tf, sampling time, method)
ans =
0.001987 z + 0.001974
---------------------
z^2 - 1.98 z + 0.9802
샘플 시간: 0.01 seconds
이산시간 전달 함수입니다Z-Transform
연속 신호에서의 Differntial Equation(미분방정식)를 쉽게 풀 수 있었던 Laplace-Transform과 반대로 이산 시간에서의 Difference Equation(차분 방정식)을 쉽게 풀 수 있는 방법은 Z-Transform입니다. 일종의 Discrete Time Fourier Transform입니다.
기본적인 정의는 다음과 같습니다.
다음과 같은 수열이 있다고 합니다.
- Two sided z-transform
- One sided z-transform
우리는 음의 시퀀스는 사용하지 않기 때문에 One sided z-transform을 사용합니다.
그리고 time delay에 대하여 다음과 같은 특징이 있습니다.
