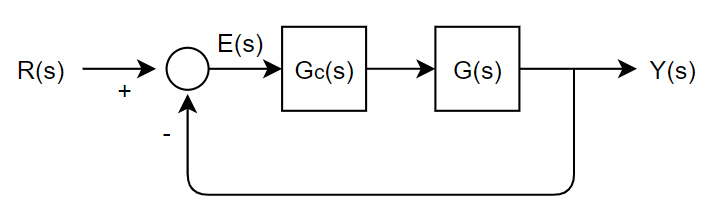
위와 같은 블럭선도가 있다고 할 때, 전달함수는 다음과 같습니다.
Y(s)=(R(s)−Y(s))Gc(s)G(s)(1+Gc(s)G(s))Y(s)=Gc(s)G(s)R(s)Y=1+Gc(s)G(s)Gc(s)G(s)R(s)R(s)Y(s)=Gc(s)G(s)=1+Gc(s)G(s)Gc(s)G(s)
오차의 정의는 다음과 같습니다.
E(s)=R(s)−Y(s)=R(s)−1+Gc(s)G(s)Gc(s)G(s)R(s)=1+Gc(s)G(s)1R(s)
Final value theorem에 따른 정상상태오차(steady state error)에 대한 정의는 다음과 같습니다.
ess=t→∞lime(t)=s→0lims⋅E(s)
Type
표준 시험 입력이 unit step (R(s)=s1)라고 한다면, 정상 상태 오차는 다음과 같습니다.
ess=t→∞lime(t)=s→0lims⋅E(s)=s→0lims⋅1+Gc(s)G(s)1R(s)=s→0lims⋅1+Gc(s)G(s)1s1=s→0lim1+Gc(s)G(s)1=1+s→0limGc(s)G(s)1
이때, s→0limGc(s)G(s)의 형태에 따라서 정상 상태 오차가 결정됩니다.
Gc(s)G(s)=sNk=1∏Q(s+pk)ki=1∏M(s+zi)
여기서 N이 의미하는 바는 (분자의 s의 최고차수 - 분모의 s의 최고차수)입니다.
N이 1보다 크다면 s→0limGc(s)G(s)는 무한대로 발산하게 되고, ess는 0으로 수렴하게 됩니다.
N에 따라서 입력에 따른 정상상태오차의 형태가 달라지게 됩니다.
그래서 N에 따라 전달함수의 타입을 구분하여 typeN이라고 합니다.
여기서의 상수 Gc(0)G(0), 즉 s→0limGc(s)G(s)를 위치오차상수 Kp라고 합니다.
.png)
