policy iteration
- Policy Evaluation 과 Policy Improvement 의 반복된 과정을 말한다.
-
이 반복되는 과정을 policy iteration 이라고 한다.
- policy 에서 시작하여
- policy evaluation 을 통해 policy 의 value function 을 찾고,
- Value function 을 활용해서
- Policy Improvement 를 통해 을 얻은 다음에
- 다시 Policy Evaluation 과정을 계속해서 반복하다 보면,
- 결국 Optimal Policy 와 Optimal Value function 을 얻게 된다.
step description
-
policy evaluation 과 policy improvement 를 활용해서 policy iteration 알고리즘을 만들 수 있다.
- Value function 이 더 나아지다가,
- optimal value function 에 가까워지면, 그 차이 값이 점점 줄어들게 된다.
- 이 value function 이 optimal value function 에 수렴했는지의 여부로써, 를 이용.
- 이 의 변화량이 점점 줄어들면, optimal value function 에 수렴했다고 가정, 멈춘다.
1. initialize
-
and for all
모든 state 에 대해서 임의의 Policy 와 임의의 Value function 을 만든다.
2. policy evaluation
임의의 policy 에 policy evaluation 을 진행한다.
set and
while
set
for
3. policy improvement
initialize value func.
set
- value function 이 optimal value function 로 수렴하는지 그 여부를 판별하기 위해 으로 설정.
calculate 1st value func.
for
-
모든 state 에 대해서 새로 계산한 value function
- 는 방금 전 policy evaluation 을 통해서 얻은 value function.
- 를 얻기 전의 value function
-
이 2개 사이의 차이 중에 가장 큰 것을 에 저장한다.
이렇게 모든 state 에 대해서 이 과정을 거치면, 차이 값 중에 가장 큰 것만 저장된다.
compare threshold, update value func.
if
for
go to 2. policy evaluation
- threshold 로 정한 값을 이라면,
- value function 이 optimal value function 에 아직 수렴하지 않았다고 판단.
- 그 다음 improvement 를 진행한다.
-
로 설정
-
모든 state 에 대해서 이 과정을 다 거친 후
- action-value 값은 에 대해서 가지고 평균 낸 값 중
- 가장 큰 action 을 라고 정하고,
- 에 대해서만 확률 값이 이 되도록, 이 외에 나머지는 전부 이 된다.
- 이와 같이 새로운 policy 로 만든다.
-
으로 설정 policy evaluation 가서 다음 를 얻는다.
-
evaluation 을 거치고 나서 얻은 로 비교하여 수렴하지 않았으면 iteration.
convergence
else
return and
- 수렴 하였으면 optimal value function 와 policy 를 return 한다.
algorithm
policy evaluation 에서 얻은 value function 을 가지고 policy improvement 를 진행한다.
set
for
if
for
go to 2. policy evaluation
else
return and
policy iteration 은 policy evaluation 과 policy improvement 가 계속해서 반복되는 구조.
-
policy evaluation 은 수렴하기 위해서 보통 여러 step 을 반복한다.
- 를 찾기 위해서 의 가 반복되서 증가
- 설정한 이하로 value 값의 변화량이 떨어질 때 까지 계속해서 반복
이 policy evaluation 을 짧게 (k-step) 만 하면서 policy improvement 를 하여 시간을 줄이자.
- policy evaluation 을 수렴할 때 까지 하는 것이 아니라,
- k-step 만 짧게 해서 policy improvement 를 반복 해도, 최종 결과는 보통 같게 된다.
- optimal policy , optimal value function 을 얻는다.
generalized policy iteration
-
임의의 policy evaluation, policy improvement 알고리즘을 활용하여 policy iteration 을 진행하는 방법.
- 다양한 알고리즘과 방법이 존재. 그 중 어떤 방법을 사용하던지
- 를 찾기만 한다면, 더욱 greedy 한 policy 를 만들기만 한다면
이 과정을 무한히 반복했을 때,
- 결과적으로 optimal policy 와 optimal value function 을 얻는다.
이 과정을 다르게 살펴보면,
-
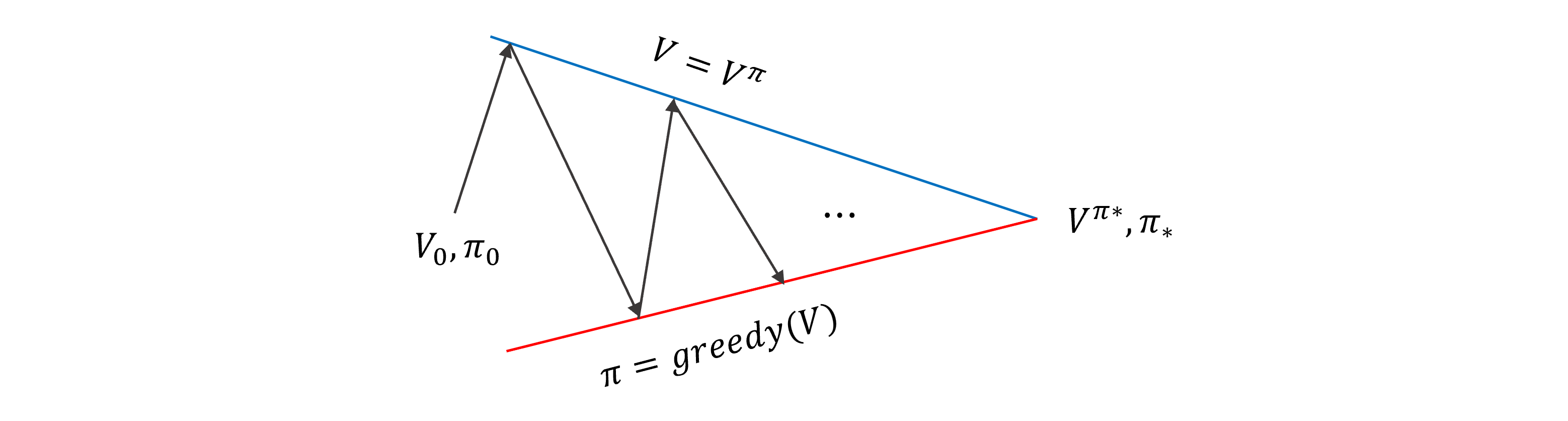
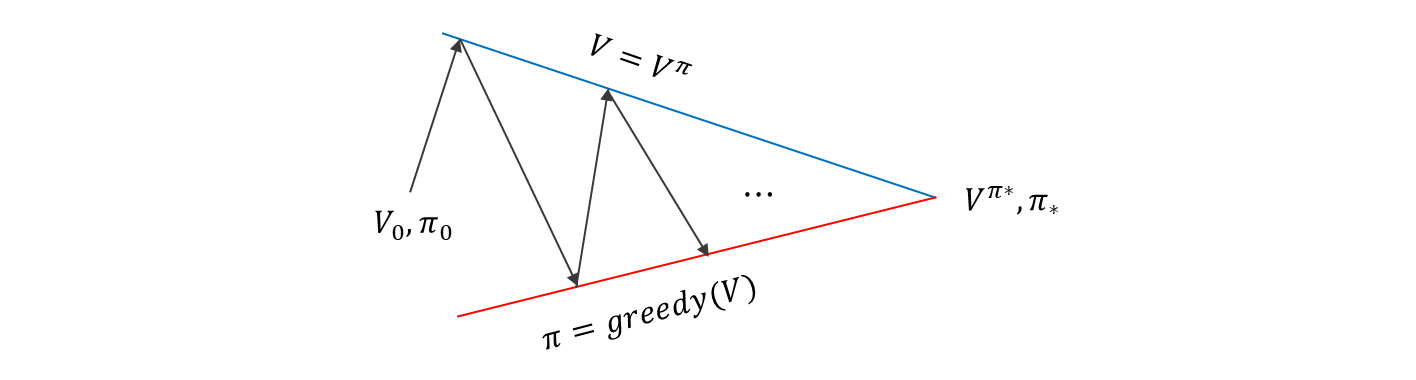
임의의 (policy) 와 임의의 (value-function) 의 초기화가 random 이다.
-
부터 시작해서
- policy evaluation 을 하면 를 얻게 된다.
- 빨간선은 어떤 value function 에 대한 greedy policy 의 점들을 나타낸 것
- 파란선은 어떤 주어진 policy 에 대한 value function 에 점을 나타낸 것
여기서 직선으로 표현했지만, 실제로는 훨씬 더 복잡한 형태가 되겠지..
conclusion
policy iteration을 계속 반복하다가, 파란선과 빨간선이 만나는 지점 optimal value-function 과 optimal policy 로 가게 된다.
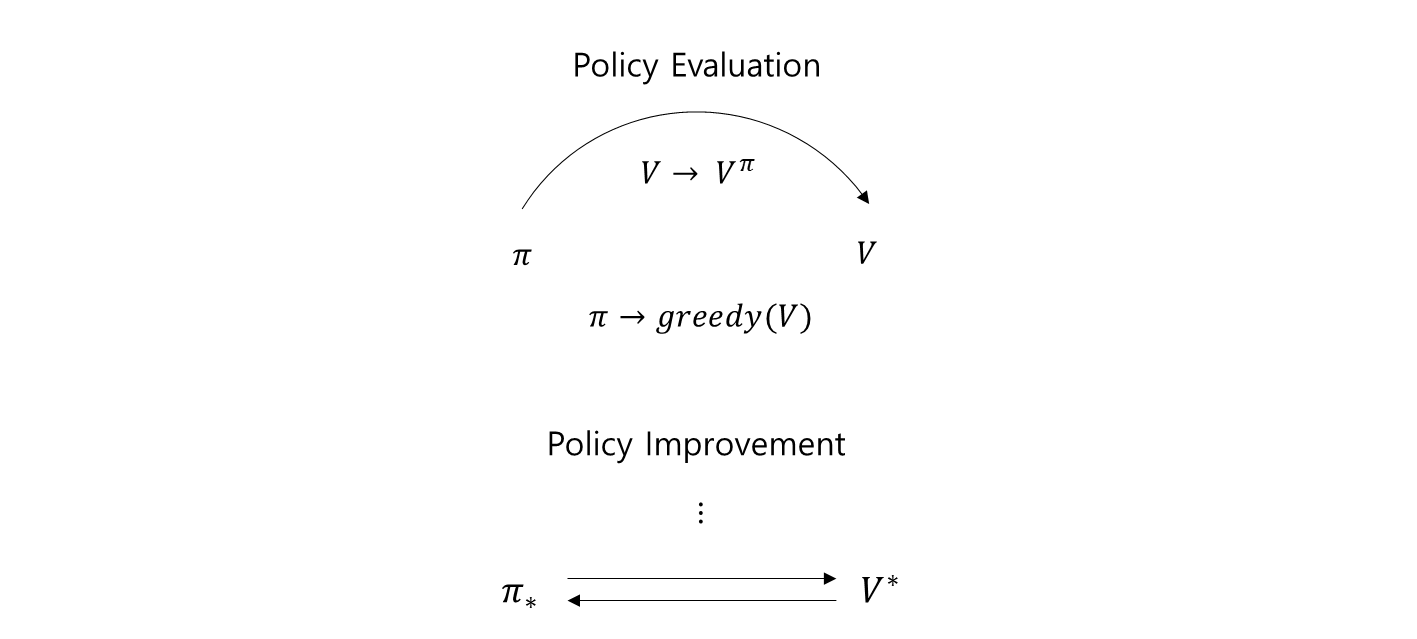
- policy evaluation : 임의의 policy evaluation 알고리즘을 사용하여 로 추정.
- policy improvement : 임의의 policy improvement 알고리즘을 사용하여 를 생성.
generalized policy iteration
- policy evaluation 과 임의의 policy improvement 를 계속 반복하는 과정
- 대부분의 강화학습 알고리즘이 이 개념으로 표현 된다.
