
0.개요
ROS 개발을 하면서 자주 깜빡하거나 알아두면 좋은 내용들을 순서 상관없이 정리하는 글이다.
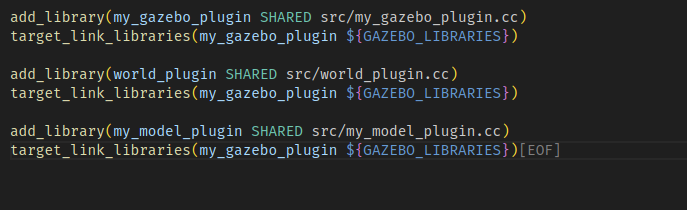
1.Gazebo Plugin 생성시 아래와 같이 CMake파일을 추가해야한다.
2..bashrc 파일에서 단축 터미널 명령어를 alias를 통해 정의 할 수 있다.

자주쓰는 명령어가 있다면 추가해서 활용해보자!
3. .py 파일에 권한 부여하기.
rosrun에 쓸 .py파일은 아래의 명령어로 반드시 권한을 부여해줘야한다.
chmod +x *.py4. 새로운 워크 스페이스 추가시 해야할 것


5. rqt quaternions 값
용어집
odomety: 거래주행계, 로봇이 기준점으로 부터 얼마나 이동했는지를 나타내는 지표TF: Transform 으로 한 프레임에 표현된 데이터를 다른 프레임으로 변환하는 방법

GoGoSing