제어공학
1.PID Controller 알아보기
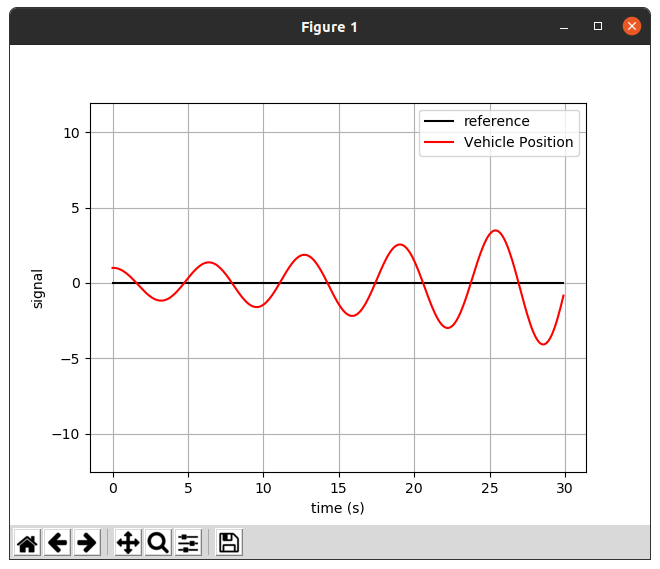
이 세상에 존재하는 로봇을 컨트롤 하기 위해서는 컨트롤러가 필요하다.로봇이 어떤 좌표에 도달하고자 할 때, 어떻게 제어해야 원하는 좌표를 찾아 갈 수 있을까?이번시간에는 여러가지 컨트롤러들을 통해 로봇을 컨트롤 하는 값을 제어하여 원하는 좌표로 도달할 수 있게끔 하는
2024년 2월 1일
2.Filter 코드 작성하고 그래프로 확인하기.

👀0.개요 💡0.1 데이터 만들기 두가지 데이터를 사용하였는데, 첫번째 데이터는 y = (x-10)(x-20) 두번째 데이터는 y = (x-10)(x-20)(x-30) 데이터를 x범위 0~50 으로 세팅하여 csv파일을 각각 만들었다. 아래의 코드를 통해 쉽게 c
2024년 2월 1일