설치
참고 - (https://docs.ros.org/en/foxy/Installation/Ubuntu-Install-Debians.html#set-locale)
Ubuntu Linux 20.04 기준
Set Locale
$ locale #check for UTF-8
$ sudo apt update && sudo apt install locales
$ sudo locale-gen en_US en_US.UTF-8
$ sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
$ export LANG=en_US.UTF-8
locale #verify settingsSet Sources
$ sudo apt update && sudo apt install curl gnupg2 lsb-release
$ sudo curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpgAdd the Ros2 apt repository to your sysmtem
$ echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/nullInstall ROS2 Packages
$ sudo apt update
$ sudo apt install ros-foxy-desktopInstall argcomplete (optional)
$ sudo apt install -y python3-pip
$ pip3 install -U argcomplete설치 확인
아래 코드를 실행하여 성공적으로 출력이 된다면 설치 완료된 것
Talker
$ source /opt/ros/foxy/setup.bash
$ ros2 run demo_nodes_cpp talkerListener
$ source /opt/ros/foxy/setup.bash
$ ros2 run demo_nodes_py listener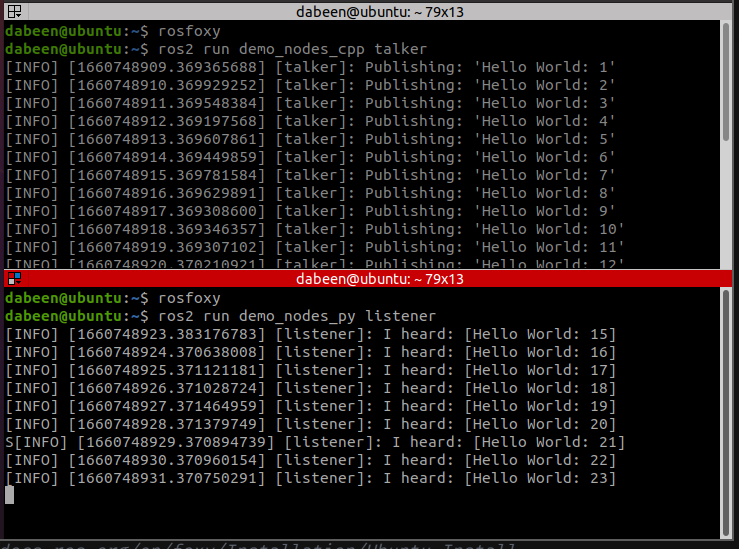
ROS 개발 tools 설치
$ sudo apt update && sudo apt install -y \
build-essential \
cmake \
git \
libbullet-dev \
python3-colcon-common-extensions \
python3-flake8 \
python3-pip \
python3-pytest-cov \
python3-rosdep \
python3-setuptools \
python3-vcstool \
wget
# install some pip packages needed for testing
$ python3 -m pip install -U \
argcomplete \
flake8-blind-except \
flake8-builtins \
flake8-class-newline \
flake8-comprehensions \
flake8-deprecated \
flake8-docstrings \
flake8-import-order \
flake8-quotes \
pytest-repeat \
pytest-rerunfailures \
pytest
# install Fast-RTPS dependencies
$ sudo apt install --no-install-recommends -y \
libasio-dev \
libtinyxml2-dev
# install Cyclone DDS dependencies
$ sudo apt install --no-install-recommends -y \
libcunit1-devROS2 명령어의 자동 완성 기능을 사용하기 위해서 아래 명령어를 설치해주어야 한다 (option)
$ sudo apt install -y python3-argcompleteROS2 환경 설정 및 단축키 관리
Source file 실행
ROS2 사용을 위해 아래 명령어를 터미널 창에 입력해주어야 한다
$ source /opt/ros/foxy/setup.bash매번 실행시키기 귀찮으니 Shell Script 파일에 Source file 실행 명령어를 추가
$ echo "source /opt/ros/foxy/setup.bash" >> ~/.bashrcShell Script 파일에 colcon_cd 추가
$ echo "source /usr/share/colcon_cd/function/colcon_cd.sh" >> ~/.bashrc
$ echo "export _colcon_cd_root=~/ros2_install" >> ~/.bashrcRun Commands 설정
$ nano ~/.bashrc
// bashrc 파일 맨 끝에 alias 지정해줌
alias ccd='colcon_cd'
alias cb='cd ~/baqu_ws(본인 워크스페이스) && colcon build --symlink-install'
alias cba='colcon build --symlink-install'
alias cbp='colcon build --symlink-install --packages-select'
alias cbu='colcon build --symlink-install --packages-up-to'
alias rt='ros2 topic list'
alias re='ros2 topid echo'
alias rn='ros2 node list'삭제
참고 - (https://docs.ros.org/en/foxy/Installation/Ubuntu-Install-Debians.html#uninstall)
sudo apt remove ~nros-foxy-* && sudo apt autoremove관련 레포지터리 삭제
sudo rm /etc/apt/sources.list.d/ros2.list
sudo apt update
sudo apt autoremove
# Consider upgrading for packages previously shadowed.
sudo apt upgrade
Web-Front / SW-AI 개발자