[Devlog] - ROS
1.[ROS2] ROS2 Foxy 설치 및 삭제
참고 - (https://docs.ros.org/en/foxy/Installation/Ubuntu-Install-Debians.html$ sudo apt update && sudo apt install curl gnupg2 lsb-release$ sudo cu
2.[ROS2] 워크스페이스
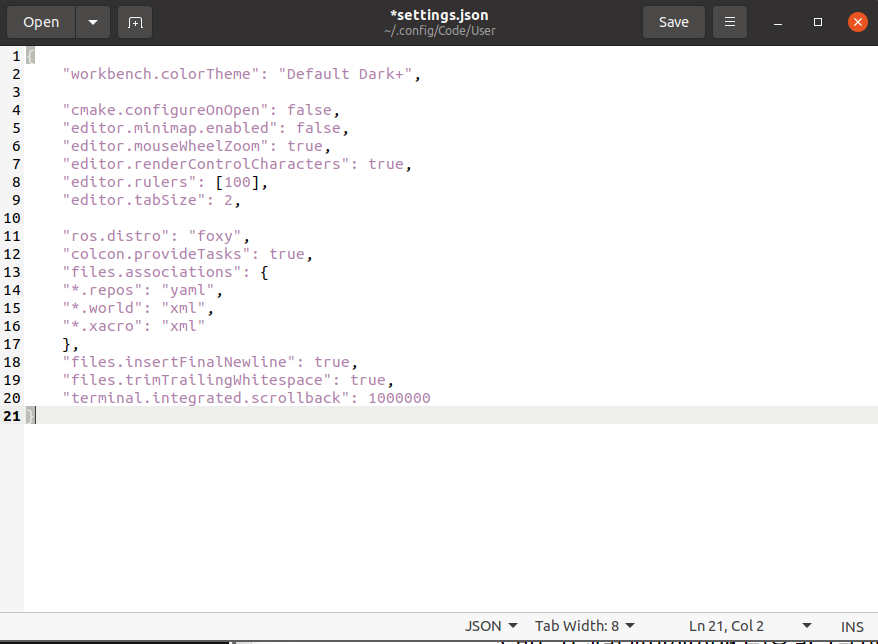
=> "baqu_ws"라는 워크스페이스 생성 \--symlink-install 명령어로 빌드하면 워크스페이스 하위 폴더에 src 이외에도 build, install, log 폴더가 생성됨아래 위치에 해당 json 파일이 없다면 직접 생성하며 작성launch.jso
3.[ROS] Turlesim 패키지 노드 실행
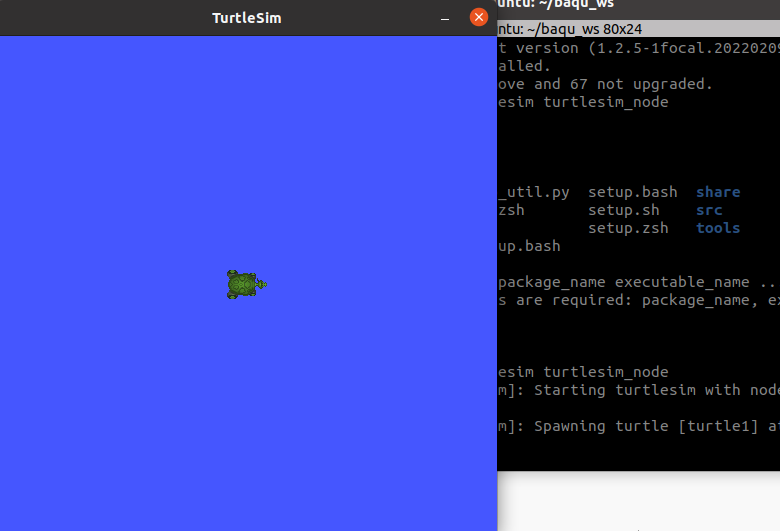
ROS를 다 깔아준 후 Turtlesim 패키지를 실행하기 위하여함수로 turtlesim 패키지를 설치해주었다.이후 를 입력해주었다오류발생ros2: command not found라는 오류가 발생!!=>해당 폴더에서 ls 로 파일들을 확인하여볼 때 파일들이 나온다면 r
4.[ROS2] 노드 실행

: 최소 단위의 실행 가능한 프로세스를 가리키는 용어ROS에서는 보통 최소한의 실행 단위로 프로그램을 나누어 작업 -> 각 노드들간의 의존성을 줄이고 독립성을 높임 -> 재사용 가능turtlesim 패키지의 노드들을 실행한다면,와 같이 실행ros2 run은 하나의 노드
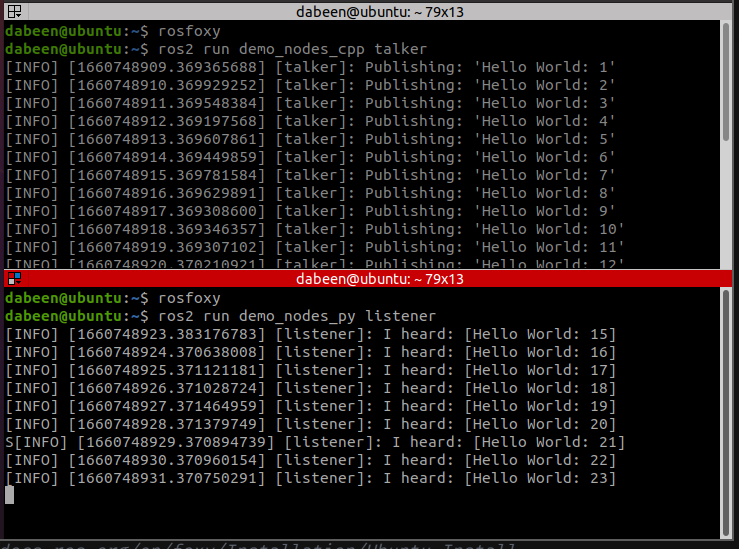
5.[ROS2] 메시지 통신
: 비동기식 단방향 메시지 송수신 방식msg 인터페이스 형태의 메시지를 퍼블리시하는 Publisher와 메시지를 서브스크라이브하는 Subscriber 간의 통신1:1 통신이 기본 // 1:N, N:1, N:N 통신도 가능ROS 메시지 통신에서 가장 많이 사용됨노드 하나
6.[ROS2] 패키지 생성
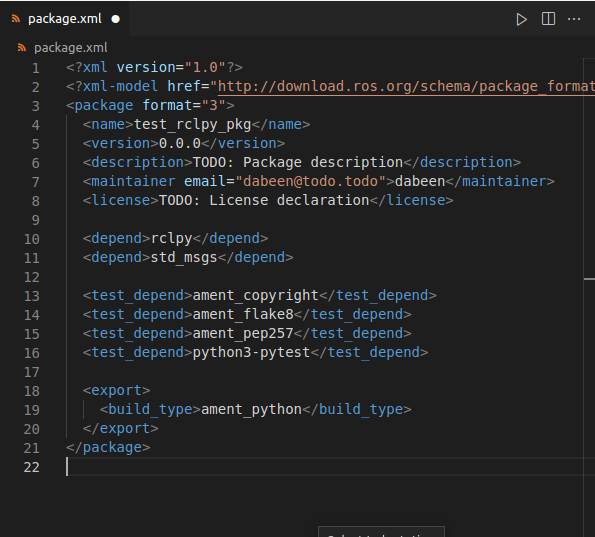
RCL로 C++을 사용한다면 build_type에 ament_cmake를 입력 Python을 사용한다면 build_type에 ament_python 입력ROS 2 특정 패키지 또는 전체 패키지를 빌드할 때에는 colcon 빌드 툴을 사용소스코드가 있는 workspace
7.[ROS2] Hello World
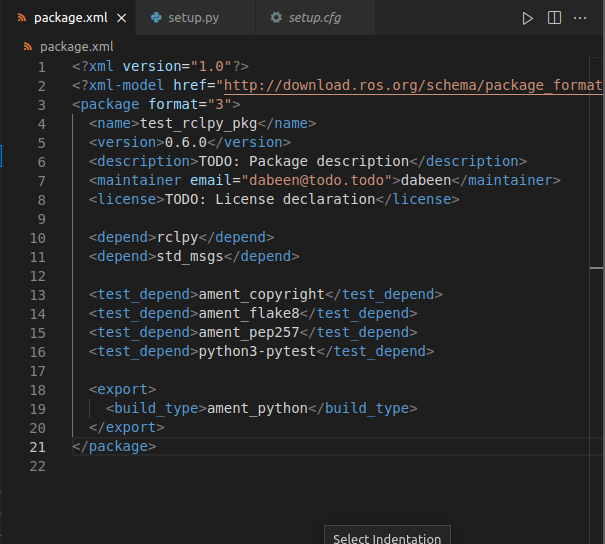
version만 수정함entry_points 옵션의 console_scripts 키를 사용한 실행 파일 설정ex) helloworld_publisher와 helloworld_subscriber 콘솔 스크립트는 각각 test_rclpy_pkg.helloworld_publ
8.[ROS] 설치
ROS 설치 전 기본 프로그램 설치 Chrome 설치 firefox에 chrome 검색하여 나오는 첫 번째 창에서 deb 파일 다운 받기 (save file) 해당 파일 경로에서 터미널을 열어 압축 풀기 Vscode 설치 우분투 앱 스토어(Ubuntu Softwar
9.[ROS] 아두이노 설치
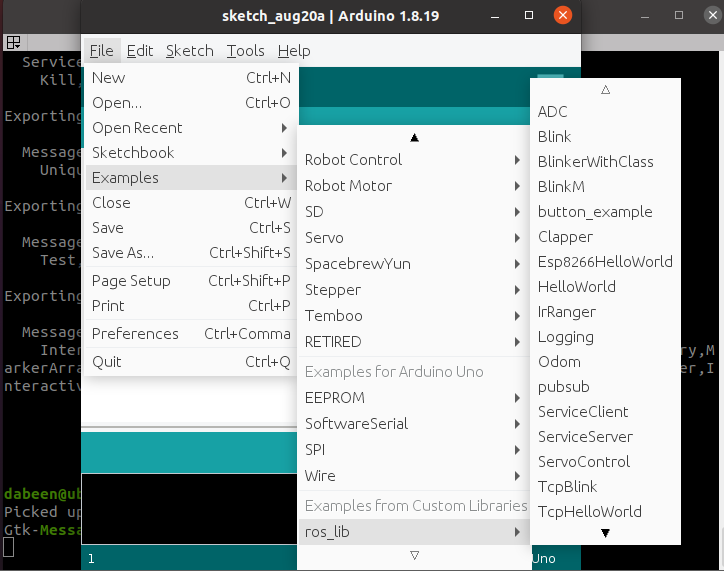
먼저 최신 버전의 아두이노를 확인하기 위해 아두이노 홈페이지에 접속다운로드 페이지 : www.arduino.cc/en/software2022.08.21 기준 최신 버전은 Arduino IDE 1.8.19wget은 터미널의 현재 위치에 파일을 다운로드=> 아래 명령어로