패키지 생성 명령어
$ ros2 pkg create [package_name] --build-type [build_type] --dependencies [dependency1] [dependency n]RCL로 C++을 사용한다면 build_type에 ament_cmake를 입력
Python을 사용한다면 build_type에 ament_python 입력
패키지 빌드
ROS 2 특정 패키지 또는 전체 패키지를 빌드할 때에는 colcon 빌드 툴을 사용
- 소스코드가 있는 workspace로 이동
- colcon build 명령어로 전체를 빌드
패키지 파일 설정
: 패키지 설정 파일(package.xml), 빌드 설정 파일(CMakeLists.txt), 파이썬 패키지 설정 파일(setup.py), RQt 플러그인 설정 파일(plugin.xml), 패키지 변경로그 파일(CHANGELOG.rst), 라이선스 파일(LICENSE), 패키지 설명 파일(README.md)
<파이썬 패키지 기준>
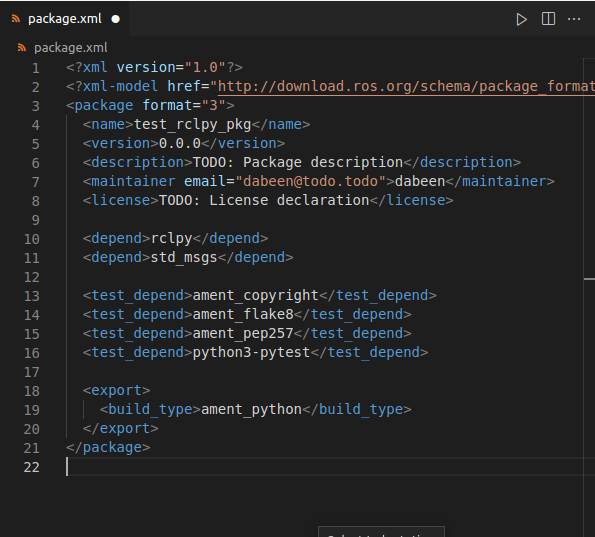
package.xml
setup.py
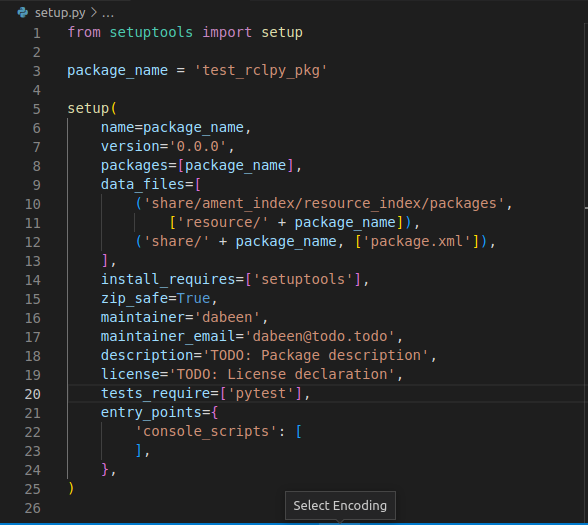
packages: 의존하는 패키지, 하나씩 나열해도 되지만 find_packages()를 기입해주면 자동으로 의존하는 패키지를 찾아준다
install_requires: 의존하는 패키지, 이 패키지를 pip을 통해 설치할 때 이곳에 기술된 패키지들을 함께 설치하게 된다. ROS에서는 pip으로 설치하지 않기에 setuptools, launch만을 기입해준다

Web-Front / SW-AI 개발자