
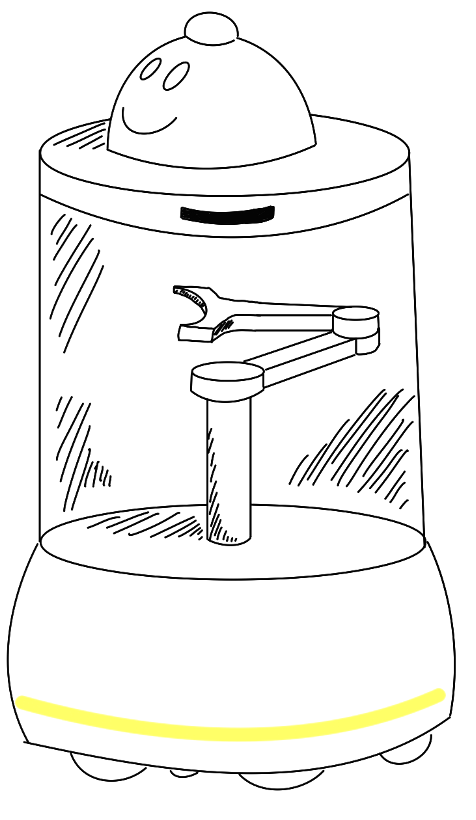
🙋🏻♂️ 해실이가 뭔가요?
해실이는 요양기관 또는 의료시설에서 사용할 수 있는 자율주행 서빙로봇입니다!
조금 복잡하지만 한마디로 기존에 물건만 옮기던 서빙로봇을 대체하는 "로봇 팔이 장착된 서빙로봇" 인거죠!
따라서 케어 인력을 보조해주는 로봇입니다!
🙋🏻♂️ 왜 이 프로젝트를 기획했나요?
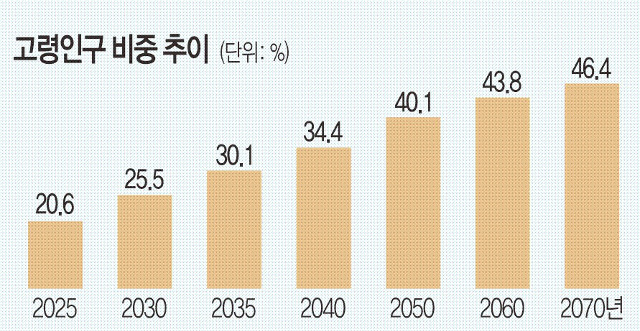
통계청에 따르면 해가 지날 수록 65세 이상 고령인구의 비중이 큰 폭으로 늘어날 것이라고 합니다.
따라서 많은 고령인구를 케어해야하는 요양 보호사분들과 같은 케어 인력을 돕기 위해 기획하였습니다.
케어를 위해 해야하는 단순 반복적인 일을해실이가 대신 해주는거죠!
🙋🏻♂️ 어떤 일을 해주나요?
사용자(케어 인력)는
해실이가 작동중일 때 명령을 내리고, 스스로 주변의 위험상황을 판단해서 사용자에게 알려줍니다.
위험상황 : 여기서 말하는 위험상황이란, 노약자 혹은 사람이 쓰러지거나 도움이 필요한 상황을 말합니다!
따라서해실이는 비전 시스템을 통해 주변상황을 계속해서 주시하고, 사용자의 명령을 기다리죠!
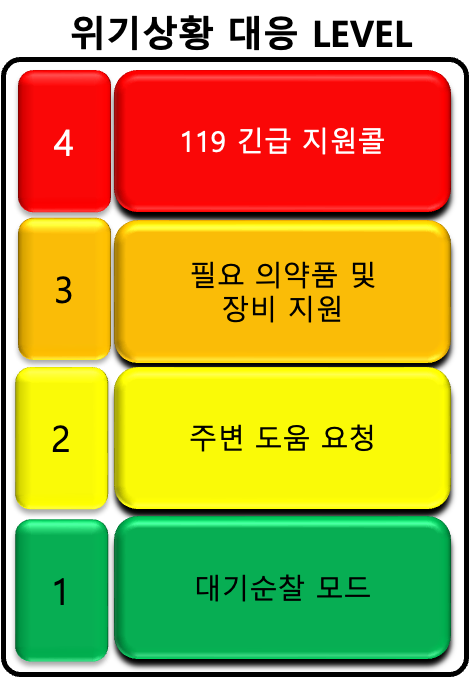
해실이가 주변상황을 파악하는 단계는 총 4단계입니다.
- 1단계 : 대기순찰 모드 -
해실이가 가동중일때 주변상황을 주시하며 위험상황을 파악하고, 사용자의 명령을 기다립니다.- 2단계 : 주변 도움 요청 -
해실이가 주변의 상황으로부터 사람의 도움이 필요한 상황을 인지하였을때, 사용자에게 알림을 보내 도움을 요청합니다.- 3단계 : 필요 의약품 및 장비 지원 - 사용자가 명령을 전달했을 때, 의약품 트레이를 가지고가서 의약품을 전달하거나, 사용자가 필요로 하는 의료장비를 가져다 줍니다.
- 4단계 : 119 긴급 지원콜 -
해실이가 위치하고 있는 기관에서 긴급한 치료가 필요하거나, 더 큰 병원으로 옮겨져야 할 때 사람을 대신하여119에 지원을 요청합니다.
🙋🏻♂️ 어떻게 사용하나요?
사용자는 앱을 통해서 로봇을 제어할 수 있습니다. 앱은 API서버를 통해서 로봇에게 명령을 전달 할 수 있고, 반대로 로봇또한 API서버를 통해 사용자에게 푸시알림을 보낼 수 있습니다!
관리자는 로봇을 유지보수하고 관제합니다. 웹앱을 통해 로그데이터를 분석해 보여주는 알고리즘으로 가공된 로봇의 로그데이터를 관리자에게 편하게 보여줌으로써 로봇의 상태를 파악하고, 오류를 검출할 수 있습니다!
🙋🏻♂️ 로봇과 앱은 어떻게 구현하나요?
1. 로봇제어 - ROS ( Robot Operating System) 이용!
2. 앱 - Flutter와 Firebase의 콜라보!
3. 서버 - AWS의 EC2를 사용하여 NodeJS의 API서버 + MySQL 데이터베이스 서버 구축!
4. 웹 - NodeJS와 Vercel의 콜라보!
5. 비전시스템 - Nvidia의 Jetson Nano에서 Yolov5를 사용해 객체를 인식!
사실 개발은 4월 초부터 했지만... 이제서야 부랴부랴 기록을 남겨야 할 것 같아 작성중이다..😅
