로봇을 다루는 업무를 하다 보면 각 장비의 네트워크를 다뤄야 하는 상황이 필연적인데
나에게도 그날이 오고야 말았다. (신입인데 벌써?)
아무튼 그동안 이름만 알고 있던 TCP, UDP와 같은 통신들을
실제로 선정해서 다뤄야 하는 상황이 생겼다.
구글에 네트워크 글들을 찾아보면 대부분 상세한 이론 설명부터 나온다.
물론 중요하긴 한데,
머리부터 들이밀며 박치기로 시작할 땐 그걸 전부 소화할 여유는 없고
당장 필요한 건 그래서 그게 뭐고, 어떤 상황에서 뭘 써야 좋은 건데?였다.
아무튼 개념을 받아들이는 입장에서 한 번 정리해보자.
이게 과연 뭘까

통신에 대해 다루게 돼서 네트워크에 대한 설명을 듣다보면
TCP, UDP, Modbus, 소켓 통신 같은 말들이 한꺼번에 등장한다.
처음엔 뭐가 뭔지 감도 안 잡히지만,
조금만 정리해보니 각각이 뭔지 알 수 있었다.
단순하게 나누면 이렇다.
- TCP / UDP
- 전송 계층
- 데이터를 어떻게 보내고 받을지에 대한 규칙
- Socket(소켓)
- 운영체제가 제공하는 통신 인터페이스(API)
- 프로그램이 TCP/UDP를 실제로 쓰게 해주는 창구
- Modbus
- 응용 계층
- 데이터를 형식과 의미에 대한 규칙
쉽게 말하면
TCP/UDP는 그냥 통신 규칙이고
Socket은 그 규칙을 쓰기 위한 상자 같은 것이고
Modbus는 그 통신 규칙을 정해서 선정된 계층의 위에 올라가는 데이터 형식에 대한 규칙이다.
이렇게 나눠서 보면
각 용어가 머릿속에서 서로 섞이지 않을 것이다.
TCP – 정확한 전달
TCP는 데이터를 빠짐없이, 순서대로 전달하는 데 목적이 있는 통신이다.
이를 위해 TCP는 내부적으로 꽤 많은 일을 하는데
- 연결을 먼저 맺고
- 데이터가 잘 도착했는지 확인하고
- 순서가 어긋나거나 빠지면 다시 보낸다
덕분에
- 데이터 유실이 없고
- 순서가 보장되며
- 이에 따라 높은 신뢰성을 가지게 된다
대신 그만큼
- 데이터 지연이 발생할 수 있고
- 실시간성은 상대적으로 떨어질 수 있다
실무에서 TCP는 주로
명령, 설정, 상태 값처럼
절대 틀리면 안 되는 데이터에 쓰일 것이다.
그러니까 TCP는 아무래도 속도보다 정확성이 중요한 쪽이라는 것이다.
UDP – 빠르게 보내기
UDP는 TCP보다 훨씬 단순하다.
- 연결 과정 없고
- 수신 확인 없고
- 그냥 보내는 게 끝이다.
그래서
- 지연이 거의 없고
- 구조가 단순하며
- 실시간 처리에 유리하다
하지만
- 데이터가 유실될 수 있고
- 순서에 보장이 없으며
- 중복 수신이 가능하다.
빠른 속도를 위해선 이정도를 감수해야 할 때 사용한다.
뭐 지속적으로 새로 갱신되는 데이터나
하나쯤 빠져도 다음 데이터가 바로 덮어주는 구조에 사용될 것이며,
정리하자면 속도와 실시간성이 우선인 쪽에 사용한다.
하드 리얼 타임이 필요한 경우가 아니라면, 가장 실시간성이 좋다고 봐도 무방하다.
Socket 통신
소켓(Socket)은 TCP나 UDP처럼 통신 자체가 아니라
프로그램이 네트워크 통신을 하기 위해 사용하는 인터페이스다.
간단하게 말하자면
TCP 통신을 한다는 말을 그냥 TCP 소켓을 열어서 통신한다고 생각하면 된다.
소켓은 운영체제가 제공하는 기능이고, 보통 이런 흐름을 따른다.
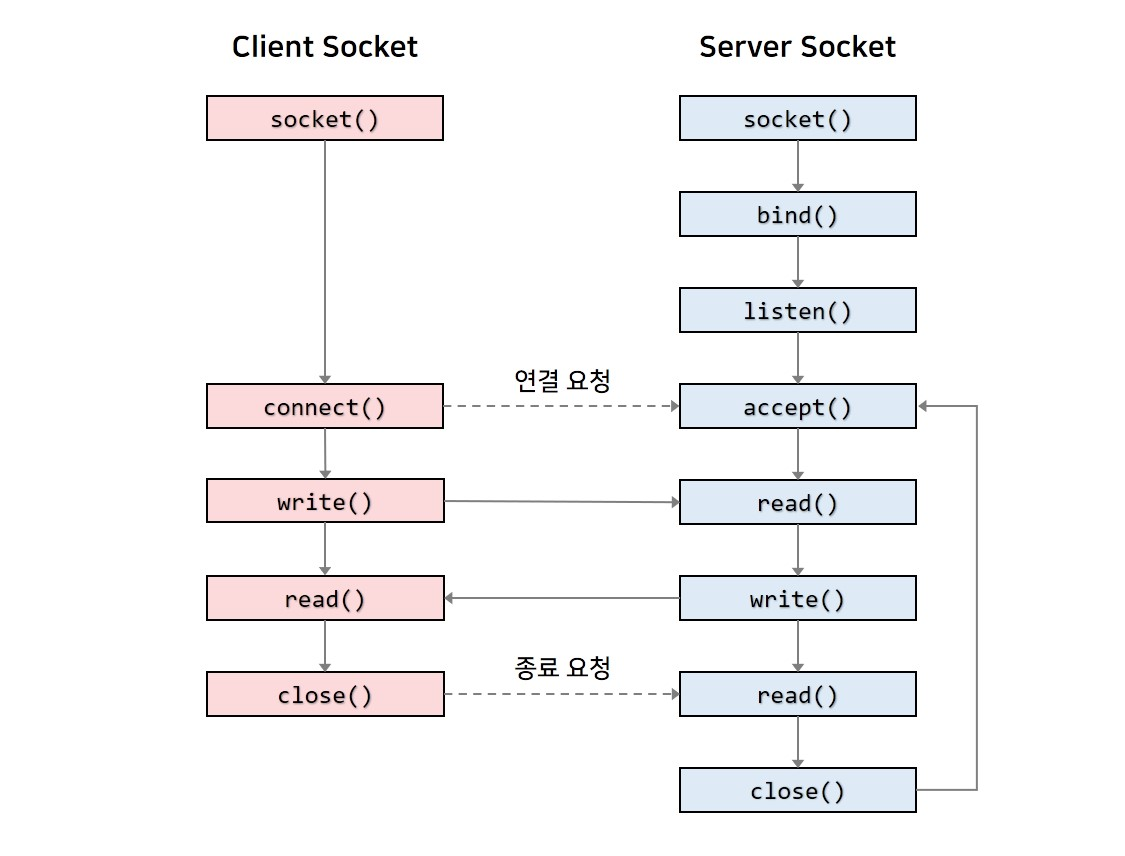
그니까 소켓은 양방향 통신의 흐름을 만들기 위한 연결점이라고 생각하면 된다.
Modbus
Modbus는 데이터를 어떻게 주고받을지 정해둔 프로토콜이다.
구조는 단순하다.
- 레지스터 기반 주소 체계
- 요청(Request) / 응답(Response)
- 읽기 / 쓰기 명령이 명확함
덕분에
- 구현이 쉽고
- 디버깅이 편하며
- 장비 간 호환성이 좋다
Modbus TCP는 TCP 위에서(client/server),
Modbus RTU는 RS485 같은 시리얼 통신 위에서(master/slave) 동작한다.
그니까 그냥 방금 봤던 전송 방식인 TCP나 Serial통신 위에 얹혀서 동작하는 규칙이다.
산업 현장에서 오래 쓰이는 이유가 그냥 여기저기 갖다대기 좋은 표준 같은 거라서 같다.
마무리
이렇게 정리한 내용에 대해 헛점이 있을 수 있다.
처음부터 완벽히 이해하고 시작하는 개념이 아니라,
그냥 당장에 해당 지식이 필요해져서 다시 보게 되는 개념에 가깝다.
역시 인생은 무언가에 대비할 시간도 안 준다.
정리 잘 된 이론 글은 이미 많고, GPT 같은 AI도 충분히 잘 설명해준다.
그리고 그건 필요할 때 다시 보면 된다.
지금 단계에서는
내 머리속이 꼬이지 않게 이 정도로 정리해두는 것만으로도 충분하다.
막히거나 필요하면 또 깊숙이 공부해야겠지만 일단은 넘어가자.
