Robotics
1.Homogeneous Transformation Matrix
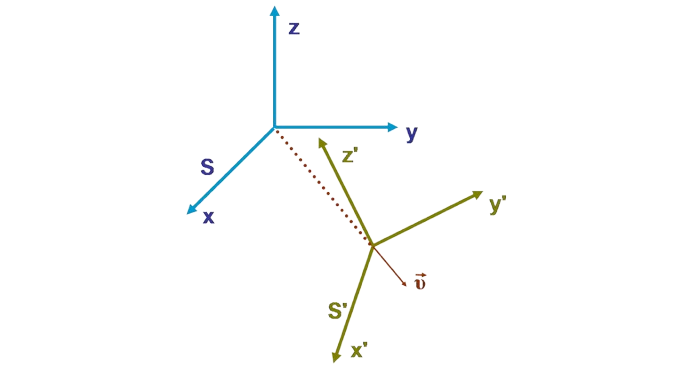
이래저래 공부를 다시 시작하다보니 복습할 게 너무나도 많다.간단하게 정리하는 것보다 침착하게 차근차근 상세하게 다뤄보며,개념에 대해 이야기할 때, 스스로 당당해지는 것을 목표로 Robotics에 관한 기본 개념을 다시 다뤄보고자 한다.Transformation Matr
2.Forward Kinematics(정기구학)와 DH parameter
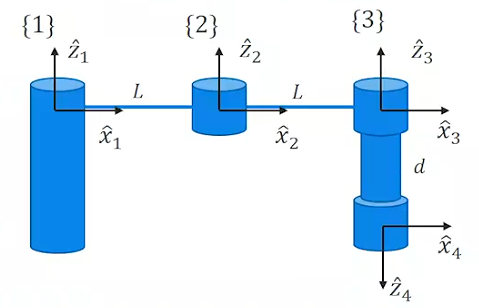
정기구학과 DH파라미터는 로봇 공학에서 로봇의 자세, 움직임을 이해하는 데에 매우 중요한 개념이다.이런 개념들은 사실 유튜브나 이런 글들로 공부하기보다책으로 예제와 실습을 통해 한 번 깨우침으로써 개념을 영구적으로 습득하는 것이 중요하다.그래도 여기까지 왔으면 같이 한
3.Inverse Kinematics(역기구학)과 Singularity(특이점)

로보틱스 분야에 대해서 이것저것 공부를 하고 있는데, 하면 할수록 부족함을 더 느끼는 것 같다. 필요한 것들이 너무 많아서 학부 시절에 조금 더 열심히 해뒀어야 한다는 후회가 가득한 느낌. 좋게 보면 우매함의 봉우리를 넘었다는 거 아닐까 ㅎ
4.TCP, UDP와 Modbus
로봇을 다루는 업무를 하다 보면 Realtime을 다뤄야 하는 상황이 필연적인데 나에게도 그날이 오고야 말았다. (신입인데 벌써?) 아무튼 그동안 이름만 알고 있던 TCP, UDP와 같은 통신들을 실제로 선정해서 다뤄야 하는 상황이 생겼다. 구글에 네트워크 글들을
5.역기전력이 뭔데 모터가 이리 빡빡해

MZ답게 선임 말 패싱하고 모터선 빼서 눈으로 역기전력 확인한 썰
6.ResNet 오래된 건데 왜 썼어요?
"ResNet 오래된 건데 왜 썼어요? 전체적인 모델 디자인은 어떻게 짜여진 거예요?"
7.ROS 말고 MQTT는 또 뭐야

업무 회의 중에 갑자기 MQTT라는 녀석이 등장했다.
8.로봇 모션이 망가지는 이유
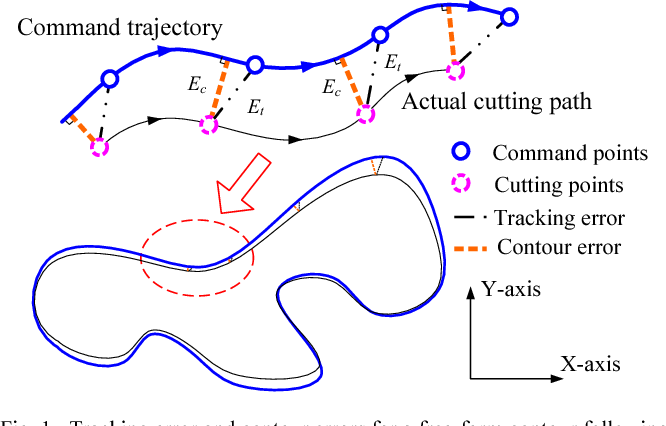
로봇팔로 반원을 그릴 일이 있었다. 그런데 문제가 생겼다
9.눈으로 본 PID 제어
얼마 전 동료가 로봇 모션을 개발하던 중, 게인을 튜닝하는 걸 옆에서 봤다. 실시간으로 모션을 보정하는 작업이라, 값 하나 바꿀 때마다 동작이 어떻게 달라지는지가 눈에 잘 들어왔다.