View Transform
OpenGL 초기 설정
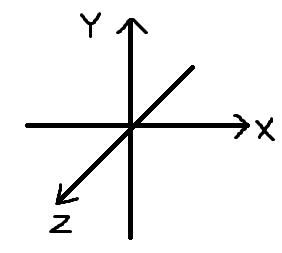
카메라의 좌표계인 View Frame은 World Frame의 원점에 일치
-z 방향을 바라봄
z좌표의 -1.0 ~ 1.0 내의 물체 촬영
View Transform
View Transform: World Frame 전체를 View Frame으로 변환
카메라의 이동 가능
- View Transform의 필요성
카메라와 물체 사이의 거리나 각도를 조정이 필요한 경우
수많은 물체를 움직이는 방법보단 카메라 하나만 옮기는 것이 훨씬 효율적임
Viewing API 용어 정리
- p: VRP (View Reference Point)
카메라의 위치 - n: VPN (View Plane Normal)
카메라의 방향, 카메라 뒤쪽으로 View Plane에 수직인 벡터 - v: VUP (View Up Vector)
카메라의 위쪽 방향, View Plane의 y방향 설정 - u
x축을 나타내는 벡터
하지만 v벡터와 n벡터를 외적하여 u벡터를 구할 수 있음
Viewing Matrix Calculation
M_view: View Transform 행렬
q_view = M_view q_world
q_world = M_model q_model
M_model: Model Transform 행렬
즉, q_view = M_view M_model q_model
Model Frame의 좌표는 Model Transform과 View Transform을 거쳐 View Frame의 좌표로 변환됨
View Transform의 계산
좌표계 변환 - World Frame 관점
- VRP
p_world = (px, py, pz, 1)
호모지니어스 좌표계에서 좌표의 w 값은 1 - VPN
n_world = (nx, ny, nz, 0)
호모지니어스 좌표계에서서 벡터의 w 값은 0
정규화된 유닛벡터라 가정 - VUP
v_world = (vx, vy, vz, 0)
정규화된 유닛벡터라 가정
좌표계 변환 - View Frame 관점
- VRP
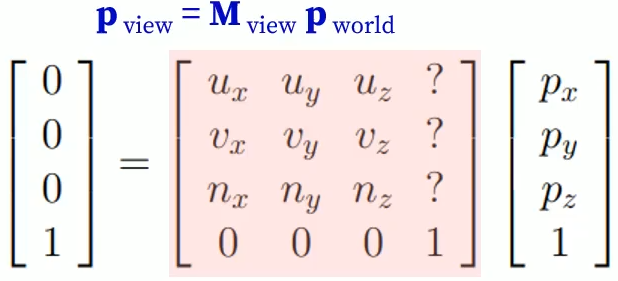
p_view = (0, 0, 0, 1) - VPN
n_view = (0, 0, 1, 0)
카메라의 방향이 -z 방향이므로, 그 반대인 +z 방향을 가짐 - VUP
v_view = (0, 1, 0, 0)
y축 방향 - u 벡터 계산
u_view = v_view x n_view
x축 방향
Viewing Matrix Calculation
-
조건식 추출
아래 네 행렬식을 만족하는 View Transform 행렬을 구해야 함
-
Viewing Transform은 Affine Transformation의 일종
카메라 세팅 시 Rotation과 Translation은 가능
Sclaing은 불가능
Affine Transformation의 특성 상 Rotation과 Translation은 별도로 계산 가능
- View Transform은 3D Rotation의 역변환
- basis vector를 회전 변환하는 행렬
xyz의 basis vector를 uvn으로 변환 - basis vector로 돌리는 역행렬
World Frame 상 정의된 uvn 벡터를 View Frame으로 변환View Transform 행렬의 회전 행렬 부분을 구함
- basis vector를 회전 변환하는 행렬
-
World Frame 상의 카메라의 위치를 View Frame 상 원점으로 이동 변환
- 미지수 3개를 구할 수 있음
- 최종 결과View Transform 행렬의 이동 행렬 부분을 구함
- 미지수 3개를 구할 수 있음
-
행렬 분해
View Transform 행렬은 회전/이동 행렬로 분해할 수 있음
OpenGL default setting
-
카메라 위치
-
View Plane Normal
-
View Up Vector
-
u = v x n
-
디폴트 세팅 상태의 카메라를 View Transform 변환
View Transform 행렬은 아무런 변화가 없는 단위행렬로 나타남
Rotating View 프로그램
View Panning 설정
zx평면 상에서 원점을 기준으로 카메라가 원궤도를 돌게 함
카메라의 y축 좌표는 고정
-
세팅
-
View Transform 행렬에 대입
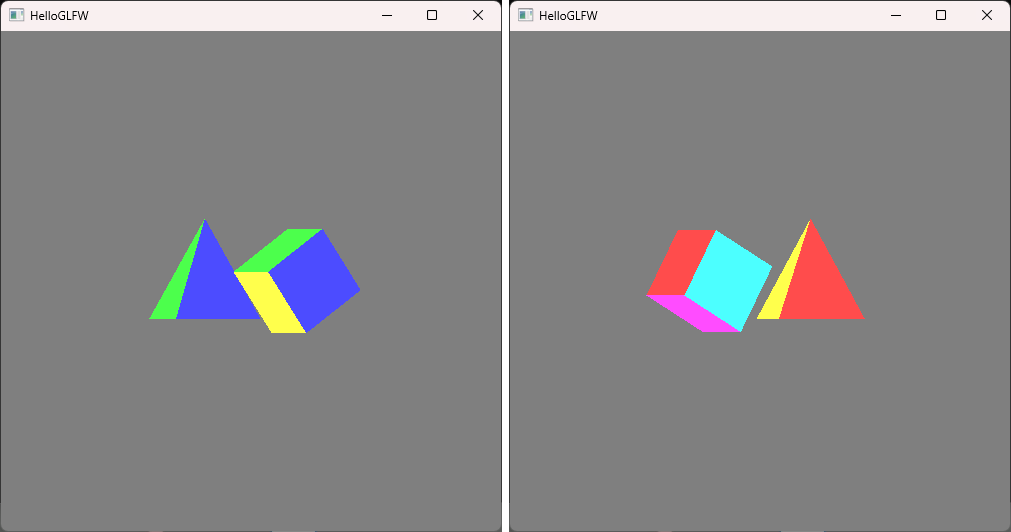
예제 프로그램
- Vertex Shader 프로그램
#version 330 core
in vec4 aPos; // vertex position: attribute
in vec4 aColor; // vertex color: attribute
out vec4 vColor; // varying color: varying
uniform mat4 uModel; // model matrix: uniform
uniform mat4 uView; // view matrix: uniform
void main(void) {
gl_Position = uView * uModel * aPos; // transformation
gl_Position.z *= -1.0F; // negation
vColor = aColor;
}- Fragment Shader 프로그램
그대로 사용
#version 330 core
in vec4 vColor; // varying color: varing
out vec4 FragColor; // fragment color: framebuffer
void main(void) {
FragColor = vColor;
}- updateFunc()
View Transform 행렬 초기화
(column-major 주의)
glm::mat4 matView = glm::mat4(1.0F);
void updateFunc(void) {
...
// viewing transform
GLfloat radius = 0.1F;
matView[0][0] = cosf(theta); matView[0][2] = sinf(theta);
matView[2][0] = -sinf(theta); matView[2][2] = cosf(theta);
matView[3][2] = -radius;
}- drawFunc()
레지스터에 View Transform 행렬 세팅
void drawFunc(void) {
...
// matrix settings
GLuint locView = glGetUniformLocation(prog, "uView");
glUniformMatrix4fv(locView, 1, GL_FALSE, glm::value_ptr(matView));
// 이후 피라미드, 큐브 draw
...
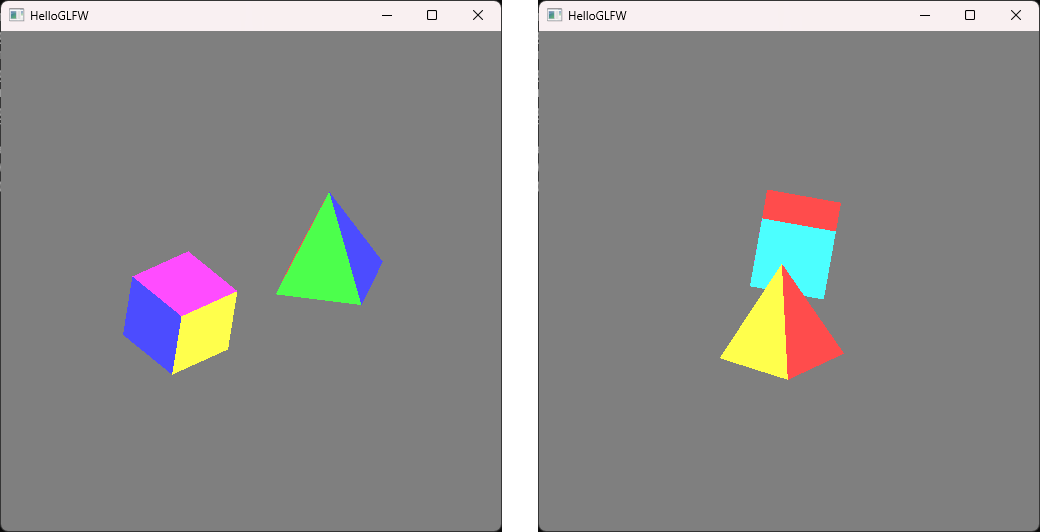
}y축을 기준으로 카메라가 반시계방향으로 회전하는 것을 확인
Look-At 방법
View Transform 설정의 문제점
- 설정에 필요한 정보
- 카메라 위치: 점 p_world
- View Plane Normal: n_world 벡터
- View Up Vector: v_world 벡터
어떻게 n, v 벡터가 단위 벡터여야 하며 서로 직교하게 만들어야 함
3차원 공간 상에서 어떻게 설정하고 계산해야할 지 문제
서로 직교하는 x,y,z basis vector를 변환 후 u,v,n basis vector의 직교 좌표계로 만들어야 함
u, v, n을 직접 계산하지 않고 직관적인 방법이 필요
Look-At Approach
이 때 카메라의 윗방향은 다시 계산할거라 대강 결정해도 괜찮음
- VRP (View Reference Point)
p = eye - VPN (View Plane Normal)
n = -normalize(at - eye) - u 벡터
u = normalize(up x n) - View Up Vector
v = normalize(n x u)
이렇게 u,v,n 벡터가 직교 좌표계를 이룸
Look-At 프로그램
View Panning 설정
아까의 카메라가 원궤도를 돌게 하는 프로그램
단 u,v,n 벡터를 직접 계산하지 않음
- 세팅
예제 프로그램
- updateFunc()
View Transform 행렬을 세팅하는 부분을 glm의 lookAt 함수로 대체
(오른손 좌표계의 함수 사용)
// eye, at, up을 순서대로 전달
void updateFunc(void) {
...
// viewing transform
GLfloat radius = 0.1F;
matView = glm::lookAtRH(
glm::vec3( radius * sinf(theta), 0.0F, radius * cosf(theta) ),
glm::vec3( 0.0F, 0.0F, 0.0F ),
glm::vec3( 0.0F, 1.0F, 0.0F )
);
}- 디버깅
View Transform 행렬의 값이 잘 나오는 것을 확인
// 코드
std::cout << glm::to_string( matView ) << std::endl;
// 출력 결과 (column-major)
mat4x4(
(0.964142, 0.000000, 0.265388, 0.000000),
(0.000000, 1.000000, -0.000000, 0.000000),
(-0.265388, 0.000000, 0.964142, 0.000000),
(-0.000000, -0.000000, -0.100000, 1.000000)
)LowLevel 함수
void updateFunc(void) {
...
const GLfloat radius = 0.1F;
glm::vec3 eye( radius * sinf(theta), 0.05F, radius * cosf(theta) );
glm::vec3 at( 0.02F, 0.0F, 0.0F );
glm::vec3 up( 0.0F, 1.0F, 0.0F );
glm::vec3 p = eye;
glm::vec3 n = -glm::normalize(at - eye);
glm::vec3 u = glm::normalize( glm::cross(up, n) );
glm::vec3 v = glm::cross( n, u );
matView[0][0] = u.x; matView[1][0] = u.y; matView[2][0] = u.z; matView[3][0] = -glm::dot(u, p);
matView[0][1] = v.x; matView[1][1] = v.y; matView[2][1] = v.z; matView[3][1] = -glm::dot(v, p);
matView[0][2] = n.x; matView[1][2] = n.y; matView[2][2] = n.z; matView[3][2] = -glm::dot(n, p);
matView[0][3] = 0.0F; matView[1][3] = 0.0F; matView[2][3] = 0.0F; matView[3][3] = 1.0F;
} 살짝 비스듬하게 내려다보며 카메라가 회전하는 것을 확인
Other Viewing Methods
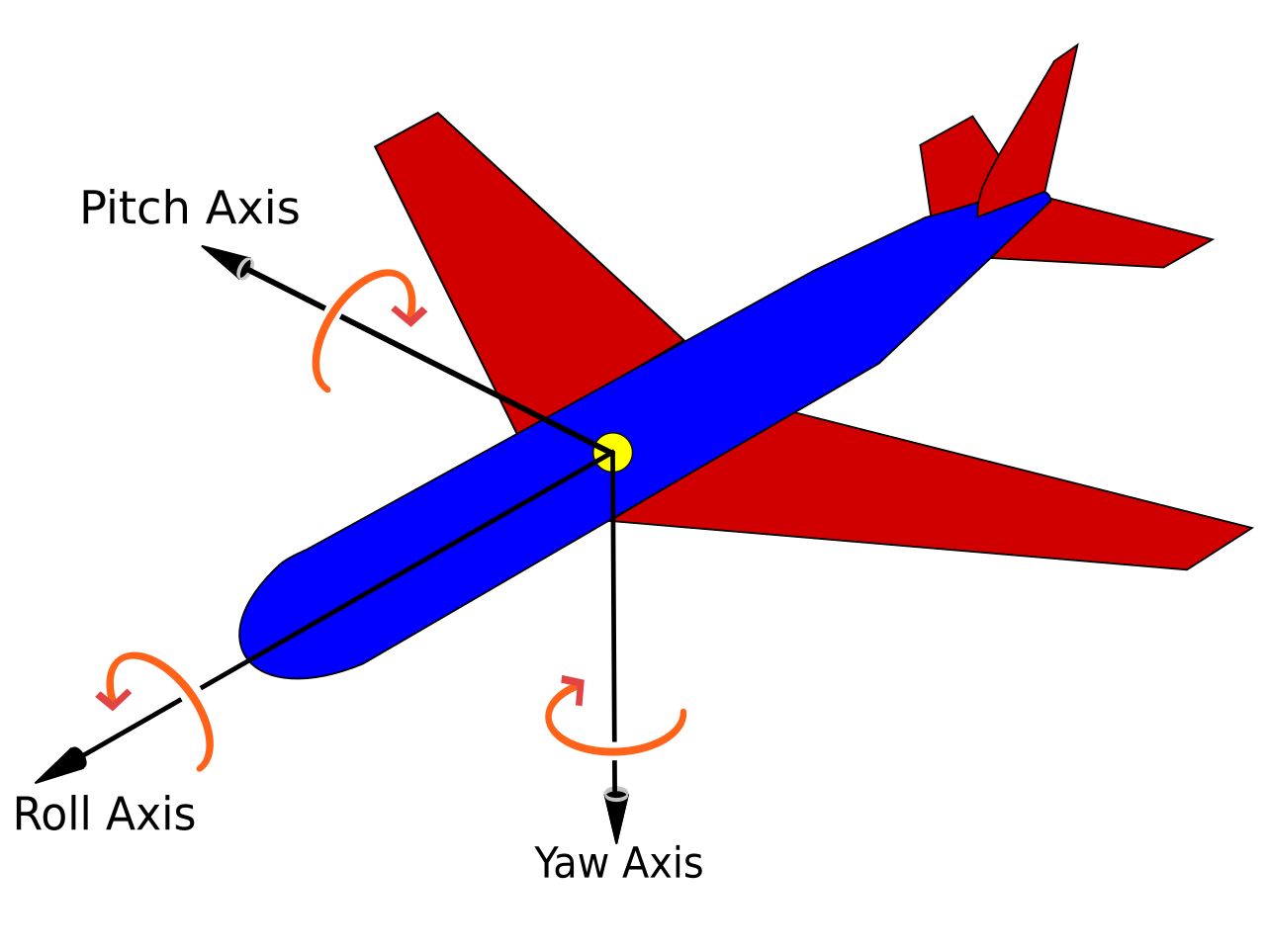
Yaw-Pitch-Roll 방식
- Yaw (z축)
수직 방향 회전 - Pitch (y축)
옆 방향 회전 - Roll (x축)
전진 방향 회전
- Euler Angle과의 관계
Euler Angle 중에서 특별히 z-y-x축 순서로 회전하는 경우 정확히 일치함
Polar Coordinate (극좌표) 방식
- Azimuth (방위각)
xy평면 상의 각도 - Elevation (고각)
높이에 대한 각도
2개의 회전 행렬로 구현 가능
왼손 좌표계의 고려
- 장점
VPN 벡터가 Look-At과 유사
DirectX에서 사용 - 단점
오른손 좌표계와 z축이 반대로 계산