learning agent에게 아래 둘은 상충하는 관계이다.
- Exploitation: 현재 지식을 기반으로 퍼포먼스를 최대화하는 것
- Exploration: 지식을 늘리는 것
우리는 최적의 결정을 내리기 위해 정보를 얻어야 하며, 그러기 위해서는 단기적인 이익을 포기해야 할 수 있다.
The Multi-Armed Bandit
Multi-Armed Bandit(여러 레버를 가진 슬롯 머신)은 다음 분포의 집합이다. {Ra∣a∈A}
- A는 가능한 액션의 집합이다 (레버들)
- Ra는 a에 대한 보상의 분포이다.
- t 스텝에, 에이전트는 At∈A를 고르게 된다. (레버들 중 하나)
- 그러면 환경은 Rt∼Rat 를 생성하게 된다.
- 이 게임의 목표는 누적 보상합인 ∑i=1tRi를 최대화하는 것이다.
- 우리는 A에 대한 분포인 policy를 학습해야 한다.
a에 대한 action value는 보상의 기댓값으로, 아래와 같이 나타난다.
q(a)=E[Rt∣At=a]
이때 optimal value는 다음과 같다.
v∗=a∈Amaxq(a)=amaxE[Rt∣At=a]
action a에 대한 regret은 다음과 같다.
Δa=v∗−q(a)
regret이 커질수록 잘못하고 있다는 것이며, regret이 0에 가까울 수록 잘하고 있다는 것이다.
그러면 우리는 total regret을 최소화해야 한다.
Lt=n=1∑tv∗−q(An)=n=1∑tΔAn
보상의 누적합을 최대화하는 것은 total regret을 최소화하는 것과 동일하다.
Algorithms
우리는 다음 알고리즘들을 다뤄볼 것이다.
- Greedy
- ϵ-greedy
- Policy Gradients
- UCB
- Thompson sampling
처음 세 개는 모두 다음 action value 추정을 사용할 것이다.
Qt(a)≈q(a)
여기서 Qt는 지금까지 a를 골랐을 때 보상의 평균이라고 보면 된다.
Qt(a)=∑n=1tI(An=a)∑n=1tI(An=a)Rn
I는 indicator function으로 I(True)=1이며, I(False)=0이다.
당연하게도 action a에 대한 count는 다음과 같다.
Nt(a)=n=1∑tI(An=a)
Qt(a)를 t마다 업데이트하는 과정은 너무 간단하므로, 생략한다.
Greedy Algorithm
Greedy policy는 가장 높은 value를 갖는 action을 고르는 방법이다.
At=aargmaxQt(a)
이는 이와 동치이다.
πt(a)=I(At=aargmaxQt(a))
이 경우 suboptimal한 액션에 영원히 갇힐 수 있다는 단점이 있다.
이 때 regret은 계속 linear하게 증가하게 될 것이다.
따라서 등장하게 된것이 ϵ-Greedy algirithm이다.
ϵ-Greedy algirithm
ϵ-Greedy algirithm는 다음과 같다.
- 1−ϵ의 확률로 greedy하게 액션을 선택한다. a=aargmaxQt(a)
- ϵ의 확률로 랜덤한 액션을 선택한다.
이는 아래와 동치이다.
πt(a)={(1−ϵ)+ϵ/∣A∣ϵ/∣A∣if Qt(a)=maxbQt(b)otherwise
이 알고리즘은 greedy와 다르게 exploration을 계속할 수 있다는 것을 알 수 있다.
Policy gradients
값을 학습하는 것 대신에 π(a)를 직접 학습할 수 있을까?
예를 들어 action preferences를 Ht(a)라고 하고, 와 policy를
πa=∑beHt(b)eHt(a)
라고 정의하자. (softmax)
여기서 preferences는 value와 다르다. 그냥 학습가능한 policy의 매개변수이다.
우리는 policy 매개변수를 value의 기댓값이 증가하도록 업데이트해야하며,
이때 gradient ascent를 사용할 수 있다.
θt+1=θt+α∇θE[Rt∣πθt]
여기서 θ는 현재 policy 매개변수이다.
하지만 ∇θE[Rt∣πθt]를 바로 계산하기는 어렵다.
따라서 log-likelihood trick (또는 REINFORCE trick)을 사용하여 식을 변형해줄것이다.
∇θE[Rt∣πθt]=∇θa∑πθ(a)E[Rt∣At=a]=q(a)=a∑q(a)∇θπθ(a)=a∑q(a)πθ(a)πθ(a)∇θπθ(a)=a∑πθ(a)q(a)πθ(a)∇θπθ(a)=E[Rtπθ(At)∇θπθ(At)]=E[Rt∇θlogπθ(At)]
정리하자면 아래와 같다.
∇θE[Rt∣πθt]=E[Rt∇θlogπθ(At)]
따라서 위의 gradient ascent에 이를 sample을 통해 적용하면 아래와 같아진다.
θt+1=θt+αRt∇θlogπθ(At)
이를 policy의 value에 대한 stochastic gradient ascent라고 부른다.
이를 통해 우리는 value에 대한 추정을 하지 않아도 되고, 단지 sampled reward만 사용해도 된다.
자, 이제 이 예시를 위의 softmax에 적용해보자.
Ht+1(a)=Ht(a)+αRt∂Ht(a)∂logπt(At)=Ht(a)+αRt(I(a=A−t)−πt(a))
이는 아래와 같이 쓸 수 있다.
Ht+1(a)={Ht(At)+αRt(1−πt(At))Ht(a)+αRt(πt(a))if a=Atelse if a=At
이 경우 local optimum에 빠질 수 있다. 즉 이것만으로는 exploration 문제를 해결할 수 없으나, deep reinforcement learning으로 가는 가이드라인을 잡아준다.
Policy gradients with baselines
∑aπθ(a)=1이기 때문에 θ와 a에 의존성이 없는 어떤 b에 대해서라도 아래 식이 성립한다.
a∑b∇θπθ(a)=a∑b∇θπθ(a)=0
이 뜻은 우리가 baseline을 정할 수 있다는 뜻이며,
원래 식을 아래와 같이 바꿔 사용할 수 있다.
θ=θ+α(Rt−b)∇θlogπθ(At)
Theory: what is possible
이쯤에서 우리는 해봤자 얼마나 더 잘 할 수 있을까? 우리가 희망하는 베스트는 어디까지인가를 할 필요가 있다.
이를 위해 다음 정리를 소개한다.
Lai and Robbins Theorem
t→∞limLt≥logta∣Δa>0∑KL(Ra∣∣Ra∗)Δa
( Note: KL(Ra∣∣Ra∗)∝Δa2 )
이를 통해 우린 regret이 적어도 logarithmic하게 상승한다는 것을 알 수 있다.
즉, 우리가 얼마나 좋은 알고리즘을 생각하던간에 regret은 최소 logarithmic하게 증가한다는 것이다.
일단 지금까지 봐온 ϵ-greedy나 policy gradient는 regret이 linear하게 증가한다. 그럼 logarithmic한 upper-bound를 가지는 알고리즘이 존재할까?
당연히 있다!
Counting Regret
일단 그전에, regret을 좀 다르게 접근해보자.
위에서 action a에 대한 regret은 아래와 같이 계산했다.
Δa=v∗−q(a)
그리고 total regret은 다음과 같다.
Lt=n1∑tΔAn=a∈A∑Nt(a)Δa
제일 오른쪽 변을 보게 되면, 결국 Δa가 큰 액션에 대해서는 더 적은 count를 가져야 좋은 알고리즘이 된다는 것을 알 수 있다.
Optimism in the face of uncertainty
Optimism in the face of uncertainty: 불확실할때는 낙관적이게.
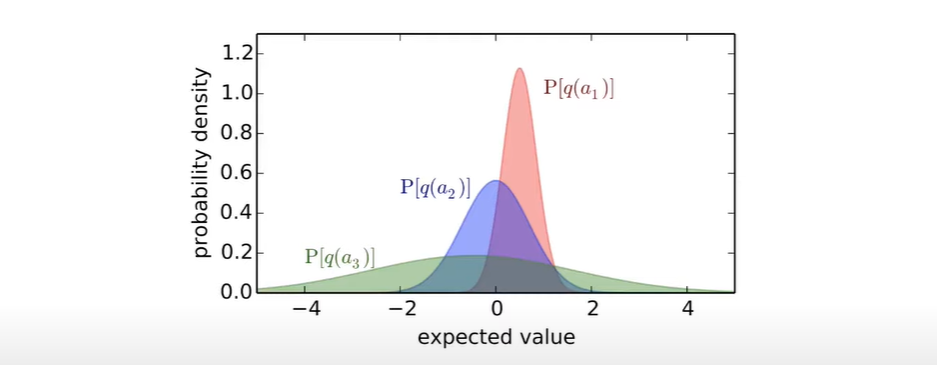
이런식으로 action들의 value 분포가 있다고 할 때, a3를 골라 exploration을 수행하라는 말이다. 이를 구체적으로 정책화한 것이 UCB이다.
Upper Confidence Bounds(UCB)
우선 각 action value들에 대해 upper confidence Ut(a)를 설정한다. 이는 높은 확률로 아래 식을 만족해야 한다.
q(a)≤Qt(a)+Ut(a)
이때, upper confidence bound(UCB)가 가장 큰 액션을 선택한다.
at=a∈AargmaxQt(a)+Ut(a)
여기서 불확정성은 해당 액션이 선택된 횟수인 Nt(a)에 의존할 것이며, Nt(a)가 작으면 Ut(a)가 클 것이고, Nt(a)가 크다면 Ut(a)가 작을것이다.
따라서 action a는 Qt(a)가 크거다 (좋은 액션) 아니면 Ut(a)가 클 때 (높은 불확정성) 선택될 것이다.
Theory: the optimality of UCB
Hoeffding's Inequality (simplified ver.)
X1,⋯,Xn이 [0,1]의 독립항등분포를 따르고, μ=E[X]라고 정의하며, 표본기댓값을 Xt=n1∑I=1nXi라 하자.
이때 다음 부등식이 성립한다.
p(Xn+u≤μ)≤e−2nu2
우리는 호에프딩 부등식을 범위가 주어진 보상을 받는 슬롯머신에 대입할 수 있다.
만약 Rt∈[0,1]이라면
p(Qt(a)+Ut(a)≤q(a))≤e−2Nt(a)Ut(a)2
가 성립한다. 그리고 대칭적으로 아래식도 성립한다.
p(Qt(a)−Ut(a)≥q(a))≤e−2Nt(a)Ut(a)2
Calculating UCB
이를 통해 우리는 UCB를 추정할 수 있다. 만약 UCB에서 정하는 최대 확률을 p라고 한다면,
e−2Nt(a)Ut(a)2=p⟹Ut(a)=2t(a)−logp
그럼 p는 어떻게 구할까?
여기서 우리는 reward를 더 많이 받을 수록 p를 줄여나가는 방향을 생각해볼 수 있다.
p=1/t처럼 말이다.
Ut(a)=2t(a)logt
이렇게 하면 우리는 계속 exploring을 시행할 것이지만, 너무 많이는 하지 않게 할 수 있을 것이다.
자 이제, 다시 원래 식으로 돌아와서 보다면, UCB는 다음과 같이 쓰여진다.
at=a∈AargmaxQt(a)+cUt(a)2t(a)logt
그럼 여기서 다음과 같은 직관을 얻을 수 있다.
- 만약 Δa가 크면, Nt(a)가 작을 것이다. Qt(a)가 작을 것이기 때문이다.
- 따라서 Δa가 작던지, Nt(a)가 작을 것이며,
- 또한 우리는 ΔaNt(a)≤O(logt) 가 모든 a에 대해 만족한다는 것을 증명할 수 있다.
Theorem (Auer et al., 2002)
c=2인 UCB는 다음을 만족하는 total regret을 갖는다.
Lt≤8a∣Δa>0∑Δalogt+O(a∑Δa),∀t.
Bayesian Bandits
우리는 p(q(a)∣θ)에 대해 Bayesian Approach를 적용해볼 수도 있다.
예를 들어 θt는 평균과 분산을 포함할 수 있다.
이렇게 이는 prior information인 θt를 주입할 수 있게 해준다.
Example
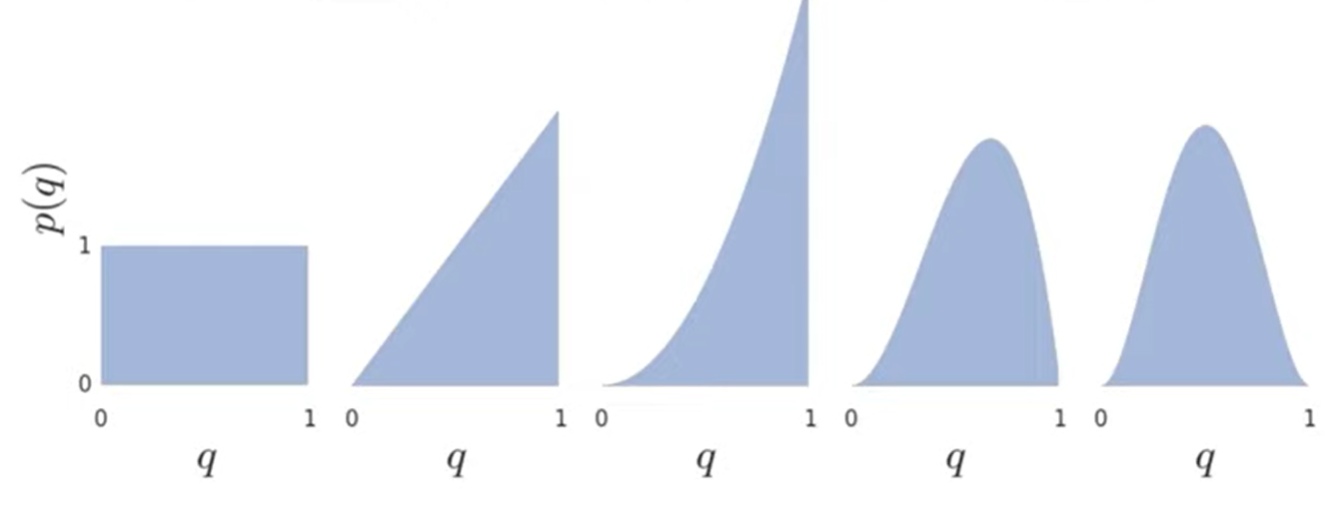
reward가 베르누이 분포 (0또는 1)를 갖는다고 가정해보자.
이때 각 액션마다, 사전분포는 [0,1]에서의 균일 분포가 될 수 있다.
그리고, 사후분포는 xa=1, ya=1인 베타분포 β(xa,ya)가 될 것이다.
이때 사후분포 업데이트는 다음과 같이 이뤄질 깃이다.
- Rt=0인 경우 xAt←xAt+1
- Rt=1인 경우 yAt←yAt+1
R1=+1, R2=+1, R3=0, R4=0이라고 가정하면 사후분포는 아래 그림과 같이 바뀔 것이다.
Bayesian Bandits with Upper Confidence Bounds
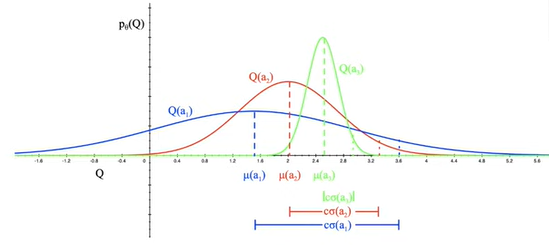
이를 이용하여 사후분포를 통해 upper confidence를 추정할 수 있을 것이다.
예를 들면 Ut(a)=cσt(a)처럼 할 수 있을 것이고, Qt(a)+cσt(a)를 최대화하는 액션을 고르면 될 것이다.
Thompson sampling
Probability Matching
UCB에 활용하는 것 말고도, 확률적 매칭을 사용하는 방법이 있다.
이는 a가 optimal할 확률에 따라 a 액션을 고르는 방법이다.
πt(a)=p(q(a)=a′maxq(a′)∣Ht−1)
이는 불확실할때는 낙천적이게 방법이다. 액션들은 추정값이 높거나, 불확실성이 높을 때 높은 확률을 갖게 될 것이다.
이때 π(a)를 사후분포로부터 계산하는 것이 어려울 수도 있다.
Thompson Sampling
톰슨 샘플링은, Qt(a)∼pt(q(a)),∀a로 샘플링을 한 후 그 중 가장 큰 값을 선택하는 방법이다.
간단히 말해 분포와 x축 사이의 면적 전체에서 임의의 점을 하나 뽑은 후, 그 점들의 x값 비교를 통해 고른다고 볼 수 있다.
At=a∈AargmaxQt(a)
따라서 톰슨 샘플링은 샘플 기반 확률적 매칭이라고 볼 수 있다.
πt(a)=E[I(Qt(a)=a′maxQt(a′))]=p(q(a)=a′maxq(a′))
Bernoulli bandits에 대해서 톰슨 샘플링은 regret이 Lai and Robbins lower bound를 만족하므로 optimal하다.
Example
액션 a, b에 대해 0과 1만을 reward로 내보내는 bandit에서 다음과 같은 상황을 가정하자.
- 첫 번째 시행에서 a를 고름. => R1=0
- 두 번째 시행에서 b를 고름. => R2=1
이때 각 알고리즘들에 대해 세 번째 단계에 액션 a를 선택할 확률, 즉 P(A3=a)를 구해보자.
-
Greedy Algorithm
현 상황에서는 당연히 b를 고를 수밖에 없다. 아마 앞으로도 무한히 b만 고를 것이다.
따라서 P(A3=a)=0
-
ϵ - greedy
ϵ - greedy의 π 함수를 다시 가져와 보자.
πt(a)={(1−ϵ)+ϵ/∣A∣ϵ/∣A∣if Qt(a)=maxbQt(b)otherwise
따라서 ∣A∣가 2이므로, P(A3=a)=ϵ/2 가 된다.
-
UCB
UCB는 결정론적 알고리즘으로, 현 상횡에서 b를 고를 수밖에 없다.
(불확실성은 똑같고, value의 기댓값은 b가 더 높음)
P(A3=a)=0
-
Thompson sampling
a의 사후확률분포는 β(1,2) 이며 b의 사후확률분포는 β(2,1)이 된다. 따라서, 이때 a가 선택될 확률을 구해보자.
Thx to Sangwon Lee
a가 임의의 x좌표 t에 있을 확률은 (2−2t)dt일 것이다. 그때 b가 t보다 작을 확률은 ∫0t2xdx=t2이 되므로, b가 a보다 작을 확률은 t2(2−2t)dt로 나타난다.
t∈[0,1]이므로 이를 정적분하면 ∫01t2(2−2t)dt=61이 될 것이다.

이제 KaTeX가 손으로 쓰는 것보다 빠를 것 같다.