우선 환경이 fully observable하다고 가정하자.
참고로 거의 모든 RL 문제들은 MDP로 형식화할 수 있다.
- Partially observable problem 도
MDP로 변환할 수 있다.
- Bandit은 한개의 상태를 가지는
MDP이다.
Markov Decision Process
Markov Decision Process는 (S,A,p,γ)이다.
- S는 모든 가능한 상태들의 집합이다.
- A는 모든 가능한 액션들의 집합이다.
- p(r,s′∣s,a)는 현재 상태가 s이고, 액션 a를 수행했을 때, 리워드가 r이고, 다음 상태가 s′일 결합확률이다.
- γ∈[0,1]는 discount factor로, 나중의 보상과 일찍의 보상의 가중치를 분배한다.
여기서 우리는 다음의 관찰을 할 수 있다.
- p는 문제의
dynamics를 정의한다.
- 가끔은 상태의 변화나
reward의 기댓값을 제외하는 것이 유용할 때도 있다.p(s′∣s,a)=r∑p(s′,r∣s,a)E[R∣s,a]=r∑rs′∑p(r,s′∣s,a)
이는 MDP의 다른 정의를 만들 수 있다. 둘은 완전히 동치이다.
Markov Decision Process (Alternative Definition)
Markov Decision Process는 (S,A,p,r,γ)이다.
- S는 모든 가능한 상태들의 집합이다.
- A는 모든 가능한 액션들의 집합이다.
- p(s′∣s,a)는 현재 상태가 s이고, 액션 a를 수행했을 때, 다음 상태가 s′일 확률이다.
- r:S×A→R은 보상의 기댓값으로, (s,a)에 의해 얻어진다.
r=E[R∣s,a]
- γ∈[0,1]는 discount factor로, 나중의 보상과 일찍의 보상의 가중치를 분배한다.
또 하나의 정의를 알아보자.
Markov Property
시간으로 인덱스된 랜덤한 변수들의 수열 {St}t∈N을 생각해보자.
이때 ∀s′∈S에 대해 다음 조건을 만족하면 state s가 Markov Property를 가진다고 말한다.
p(St+1=s′∣St=s)=p(St+1=s′∣ht−1,St=s)
(단, ht−1={S1,⋯,St−1,A1,⋯,At−1,R1,⋯,Rt−1})
MDP에서 모든 상태는 Markov Property를 가진다고 가정한다.
- state는 history로부터 모든 연관된 정보를 갖고 있다.
- state를 알고 있다면, history는 버려도 된다.
- state는 충분한 과거의 정보이다.
Returns
MDP에서 수행한 액션이 즉시 리워드 Rt$로 이어진다면 return을 다음과 같이 계산할 수 있다.
-
Undiscounted return (episodic / finite horizon pb.)
Gt=Rt+1+Rt+2+⋯+RT=k=0∑T−t−1Rt+k+1
-
Discounted return (finite or infinite horizon pb.}
Gt=Rt+1+γRt+2+⋯+γT−tRT=k=0∑T−t−1γkRt+k+1
-
Average return (continuing, infinite horizon pb.)
Gt=T−t−11(Rt+1+Rt+2+⋯+RT)=T−t−11k=0∑T−t−1Rt+k+1
Discounted Return
infinite horizon T→∞에 대한 Discounted Return Gt는 다음과 같다.
Gt=Rt+1+γRt+2+⋯=k=0∑∞γkRt+k+1
여기서 discount γ∈[0,1]은 미래의 reward가 현재에 가지는 가치라고 볼 수 있다.
- k+1 번의 스텝 이후에 받을 리워드 R의 가치는 γkR이다.
- γ<1에 대하여 당장의 보상이 나중의 보상보다 더 중요하다.
- γ가 0에 가까울수록 근시안적이며,
- γ가 1에 가까울수록 원시안적이라고 볼 수 있다.
Why discount?
거의 대부분의 Markov decision process들은 discount를 사용한다. 왜일까?
- 문제 구체화:
- 당장의 보상이 실제로 좀더 중요할 것이다.
- 인간/동물의 행동이 실제로 당장의 보상을 선호하는 것으로 보인다.
- 문제 해결적 측면:
- 수학적으로 보상을 깎는 것이 편리하다.
- cyclic Markov process에서 무한한 return을 가지는 걸 피할 수 있다.
Policies
RL agent의 목표
return Gt의 값을 최대화하는 policy를 찾는 것.
Policy는 π:S×A→[0,1]의 매핑이며, 임의의 상태 s에 대한 임의의 액션 a에 대하여 상태 s일 때 액션 a를 선택할 확률을 제시한다. 이는 π(a∣s)로 표기한다.
결정론적 policy에 대해 우리는 때때로 at=π(st)와 같은 표기를 사용하기도 한다.
Value Functions
- value function v(s)는 상태 s에 대한 장기간적 가치를 나타낸다.
vπ(s)=E[Gt∣St=s,π]
- 우리는 action value 또한 정의할 수 있다.
qπ(s,a)=E[Gt∣St=s,At=a,π]
- 이 둘 사이 관계를 다음과 같이 나타낼 수 있다.
vπ(s)=a∑π(a∣s)qπ(s,a)=E[qπ(St,At)∣St=s,π],∀s
Optimal Value Function
Optimal state-value function v∗(s)는 모든 정책중 최대값을 갖는 value function이다.
v∗(s)=πmaxvπ(s)
optimal action-value function q∗(s,a)는 모든 정책중 최대값을 갖는 action-value function이다.
q∗(s,a)=πmaxqπ(s,a)
optimal value function은 MDP에서 가능한 최고의 성능을 가지며, 이 optimal value function을 알게 되었을 때, 우리는 MDP가 "해결되었다"고 할 수 있다.
Optimal Policy
이 q∗(s,a)를 찾아냄으로써 우리는 optimal한 policy를 찾을 수 있다.
π∗(s,a)=⎩⎪⎨⎪⎧10if a=a∈Aargmaxq∗(s,a)otherwise
이때 policy간의 부분순서를 다음과 같이 정의한다면,
π≥π′⟺vπ(s)≥vπ′(s),∀s
다음과 같은 정리를 얻을 수 있다.
Theorem (Optimal Policies)
모든 Markov decision process에 대해
- 다음을 만족하는 optimal policy π∗가 존재 한다.
π≥π′∀π
- 모든 optimal policy들은 optimal value function을 만족한다.
vπ∗(s)=v∗(s)
- 모든 optimal policy들은 optimal action-value function을 만족한다.
qπ∗(s,a)=q∗(s,a)
여기서 우리는 다음과 같은 관찰을 할 수 있다.
- 모든 MDP는 결정론적 optimal policy가 존재한다.
- 만약 우리가 q∗(s,a)를 알게 된다면, 우리는 즉시 optimal policy또한 알게 된다.
- 여러개의 optimal policy가 있을 수도 있다.
- 만약 q∗(s,⋅)을 최대화할 수 있는 여러개의 action들이 있다면, 우리는 이중 하나를 고르면 된다. (물론 확률론적 선택도 가능하다)
Bellman Equations
Value Function
Value function을 다시 가져와보자.
- value function v(s)는 상태 s에 대한 장기간적 가치를 나타낸다.
vπ(s)=E[Gt∣St=s,π]
- 이는 재귀적으로 정의할 수도 있다. (마지막 줄은 기댓값을 명시적으로 작성한 것이다)
vπ(s)=E[Rt+1+γGt+1∣St=s,π]=E[Rt+1+γvπ(St+1)∣St=s,At∼π(St)]=a∑π(a∣s)r∑s′∑p(r,s′∣s,a)(r+γvπ(s′))
Action values
Action value 또한 재귀적으로 나타낼 수 있다.
qπ(s,a)=E[Rt+1+γvπ(St+1)∣St=s,At=a]=E[Rt+1+γqπ(St+1,At+1)∣St=s,At=a]=r∑s′∑p(r,s′∣s,a)(r+γa′∑π(a′∣s′)qπ(s′,a′))
Bellman Equations
따라서 우리는 다음 정리들을 얻을 수 있다.
Theorem (Bellman Expectation Equations)
MDP, M=⟨S,A,p,r,γ⟩ 가 주어졌을 때, 모든 policy π에 대하여 value functions들은 다음 기댓값 방정식을 만족한다.
vπ(s)=a∑π(a∣s)[r(s,a)+γs′∑p(s′∣a,s)vπ(s′)]
qπ(s,a)=r(s,a)+γs′∑p(s′∣a,s)a′∈A∑π(a′∣s′)qπ(s′,a′)
Theorem (Bellman Optimality Equations)
MDP, M=⟨S,A,p,r,γ⟩ 가 주어졌을 때, 모든 policy π에 대하여 value functions들은 다음 기댓값 방정식을 만족한다. v∗(s)=πmaxvπ(s)
v∗(s)=amax[r(s,a)+γs′∑p(s′∣a,s)v∗(s′)]
q∗(s,a)=r(s,a)+γs′∑p(s′∣a,s)a′∈Amaxq∗(s′,a′)
Solving RL problems using the Bellman Equations
RL Problem이란?
- vπ 또는 qπ를 계산하기. (policy evaluation 또는 prediction이라고 부름)
- 정책이 주어졌을 때, 그 행동에 대해 return의 기댓값은 얼마일까?
- 트레이딩 전략 또는 치료 프로토콜이 주어졌을 때 return의 기댓값은 얼마일까?
- v∗ 또는 q∗를 계산하기. (control이라고 부름.)
- 가장 최적의 행동은 무엇일까 가장 최적의 value function은 무엇일까?
- 가장 최적의 치료법은 무엇일까? 시간과 연료 소모를 최소화하는 최적의 정책은 무엇일까?
Example
다음과 같은 MDP를 가정하자.
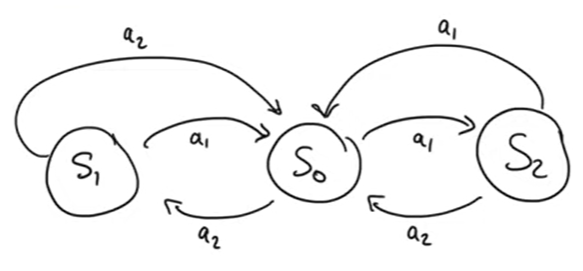
- 각 action들은 0.9의 성공확률과 0.1의 실패확률을 갖는다. 실패 시 원래 상태에 남는다.
- S0으로 향하는 모든 transition은 Rt=0이며 나머지는 Rt=−1이다.
Question: Evaluation problems (γ=0.9)
- π(s)=a1(→),∀s에 대한 vπ는?
- 균일하게 랜덤한 정책에 대한 vπ는?
- 같은 문제를 γ=0.0에 대해 계산한다면?
π가 주어졌을 때, Bellman value equation은 다음과 같이 행렬의 형태로 나타낼 수 있다.
v=rπ+γPπv
여기서 각 행렬의 원소는 다음과 같다.
- vi=v(si)
- riπ=E[Rt+1∣St=si,At∼π(St)]
- Pijπ=p(sj∣si)=a∑π(a∣si)p(sj∣si,a)
이 선형 방정식을 풀면 다음과 같은 식을 얻을 수 있다.
v=(I−γPπ)−1rπ
이때 시간복잡도는 O(∣S∣3)이며, 이는 작은 문제에서나 가능한 일이다.
문제가 커진다면 아래와 같은 iterative method들을 사용할 수 있다.
- Dynamic programming
- Monte-Carlo evaluation
- Temporal-Difference learning
Solving the Bellman Optimality Equation
Bellman Optimality Equation은 선형이 아니다.
따라서 일반적으로 같은 행렬적 방법을 사용할 수 없다.
따라서 다음과 같이 많은 iterative method들이 있다.
- 모델을 사용하는 방법
- Value iteration
- Policy iteration
- 샘플을 이용하는 방법
- Monte Carlo
- Q-learning
- SARSA
Dynamic Programming
Dynamic programming은 환경의 완벽한 모델이 MDP로서 주어졌을 때, 최적의 정책을 계산하는데 사용할 수 있는 알고리즘들이다.
우리는 MDP를 해결하기 위한 몇가지 dynamic programming 방법들을 알아볼 것이며, 각 방법들을 크게 두 부분으로 나누어서 볼 것이다.
- policy evaluation
- policy improvement
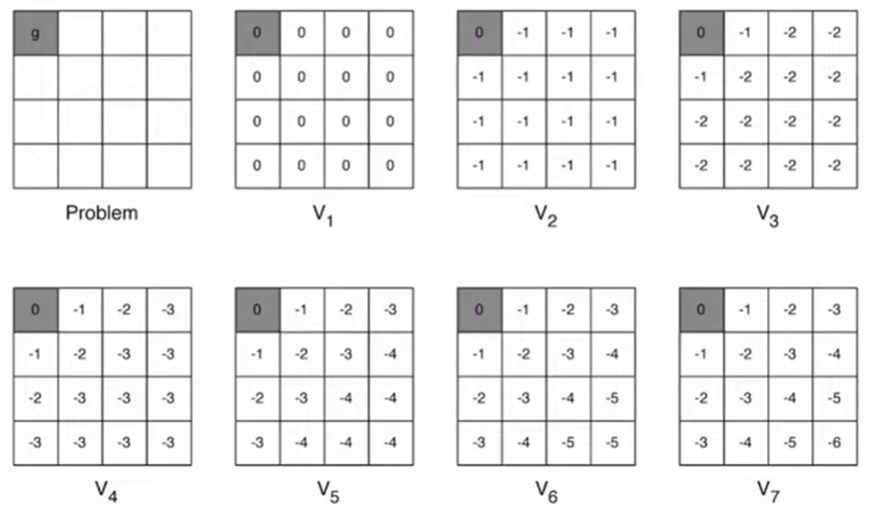
Policy evaluation
우선 어떻게 이 식을 계산할것인지에 대해 생각해보자.
vπ(s)=E[Rt+1+γvπ(St+1)∣s,π]
아이디어: 이 방정식을 업데이트로 생각하자.
Algorithm
- 먼저 v0를 초기화한다. (예를 들면 0으로)
- 그 다음 다음 식을 반복한다.
∀s:vk+1(s)←E[Rt+1+γvk(St+1)∣s,π]
- 만약 ∀s:vk+1(s)=vk(s)가 되었다면 우리는 vπ를 찾을 수 있다.
혹자는 이 알고리즘이 언제나 수렴할 수 있는지 물어보겠지만, 이 알고리즘은 적절한 조건 하에 항상 수렴한다. 이에 대한 이야기는 나중에 다룬다.
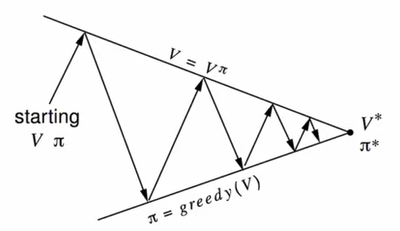
Policy Improvement
위의 방법을 사용한다면 우리는 Policy evaluation을 통해 얻은 값을 통하여 policy를 improve하는데 사용할 수 있다는 것을 알 수 있다.
만약 해당 액션을 수행하였을 때 value가 가장 커질 수 있다면 그렇게 policy를 그리디하게 선택할 수 있다는 것이다. (이는 일반적으로 참은 아니다.)
Algorithm
다음 연산을 이용하여 반복한다.
∀s:πnew(s)=aargmaxqπ(s,a)=aargmaxE[Rt+1+γvπ(St+1)∣St=s,At=a]
이렇게 πnew를 계산하고 반복한다.
그럼 이러한 의문을 가질 수 있다.
- policy evaluation이 vπ로 수렴해야 할까?
- 아니면 그냥 가깝다면 멈춰도 될까?
(예를 들어 value의 변화에 역치를 두는 방법으로?)
- 아니면 간단하게 k번 반복한 후에 멈춰도 되지 않을까?
- 좀더 극단적으로: 그냥 첫번째 게산 이후에 policy를 업데이트하지 않는 방법은 어떨까?
Value Iteration
우리는 Bellman optimality equation을 다음과 같이 바꿀 수 있다.
∀s:vk+1(s)←amaxE[Rt+1+γvk(St+1)∣St=s,At=a]
이는 두 그리디한 policy improvement 스텝을 하나의 policy evaluation 안에 하는 policy iteration과 똑같다.
Algorithm: Value Iteration
- v0를 초기화한다.
- 다음 식을 통해 업데이트한다.
∀s:vk+1(s)←amaxE[Rt+1+γvk(St+1)∣St=s,At=a] 만약 ∀s:vk+1(s)=vk(s)가 되었다면 우리는 v∗를 찾을 수 있다.
정리: Synchronous Dynamic Programming
| Problem | Bellman Equation | Algorithm |
|---|
| Prediction | Belman Expectation Equation | Iterative Policy Evaluation |
| Control | Bellman Expectation Equation + (Greedy) Policy Improvement | Policy Iteration |
| Control | Bellman Optimality Equation | Value Iteration |
- 각 알고리즘들은 state-value function vπ(s) 나 v∗(s)를 각 반복 당 시간복잡도 O(∣A∣∣S∣2)를 들여 계산한다.
- 이는 action-value function qπ(s,a) 나 q∗(s,a)에도 적용할 수 있으며 시간복잡도 O(∣A∣2S∣2)를 갖는다.
Extensions to Dynamic programming
Asynchronous Dynamic Programming
지금까지는 synchronous한 업데이트를 사용했다. (모든 상태를 병렬적으로 업데이트하는)
이를 좀 더 개선한 방법으로 Asynchronous DP를 제안한다.
Asynchronous DP는 각 상태를 개별적으로 backup한다. 하나하나 순서대로 하는 것이 아닌 비동기적으로 하는 것이다.
여기서 back-up은 다음 state-value function을 이용하여 현재의 state-value function을 구하는 것을 말한다.
이를 통해 계산시간을 획기적으로 줄일 수 있으며, 이때 만약 모든 상태에 대하여 iteration을 한다면 이는 수렴한다는 게 보장된다.
여기에 Asynchronous DP의 세 가지 간단한 아이디어들을 소개한다.
- In-Place dynamic programming
- Prioitised sweeping
- Real-time dynamic programming
In-Place dynamic programming
동기적인 value iteration은 value function의 두 복사본을 저장한다.
∀s:vnew(s)←amaxE[Rt+1+γvold(St+1)∣St=s]
In-place value iteration은 오직 하나의 복사본만을 저장한다.
∀s:v(s)←amaxE[Rt+1+γv(St+1)∣St=s]
Asynchronous DP가 가능하기 때문에 가능한 계산이다.
Prioitised sweeping
이는 Bellman error의 크기를 상태 선택에 사용하는 방법이다.
∣∣∣∣amaxE[Rt+1+γv(St+1)∣St=s]−v(s)∣∣∣∣
- 가장 Bellman error를 크게 갖는 state를 backup한다.
- 업데이트된 state의 Bellman error를 업데이트 한다.
- 이는 우선순위 큐로 쉽게 구현할 수 있다.
Real-Time Dynamic Programming
이는 agent와 관계있는 state들만 backup하는 방식이다.
예를 들어 agent가 state St에 있다면, 해당 state와 곧 도착할 것으로 예상되는 state들을 업데이트하는 방식이다.
Sample Backups
DP는 full-width 백업을 사용한다.
각 백업마다 (동기적이든 비동기적이든)
- 모든 다음 state와 action들이 고려되며
- 이는 실제 모델과 reward 함수를 사용한다.
그러나 큰 문제에서는 차원의 저주에 걸릴 수 있다.
- 상태의 개수 n=∣S∣는 상태 변수의 숫자가 늘어날 수록 기하급수적으로 늘어난다.
심지어 한번의 full backup또한 너무 오래 걸린다.
따라서 다음 강좌에서는 sample backup에 대해 알아볼 것이다.
여기에서는 sample reward와 sample transition ⟨s,a,r,s′⟩를 사용한다.
이를 통해 얻는 이익은 다음과 같다.
- Model-free: 더이상 MDP에 대한 사전지식이 필요없다.
- Sampling을 통해 차원의 저주를 풀 수 있다.
- backup의 비용이 상수이며 n=∣S∣로부터 독립적이다.