
open_maipulator 코드 안의 헷갈리는 개념, 문법 정리하기
libs/src/open_manipulator.cpp
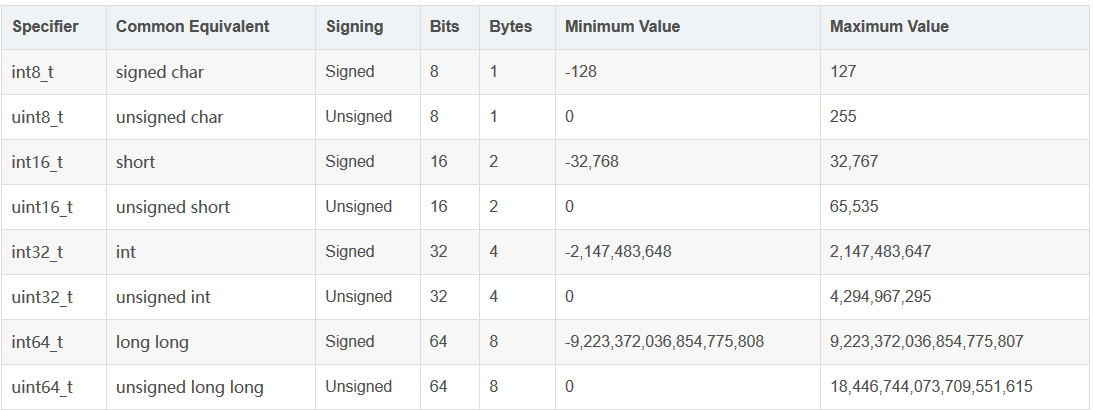
1. int8_t, uin9_t, int16_t, uint16_t..
<stdint.h> 라는 헤더에 정의되어 있는 자료형.
int8_t = signed char
int16_t = short int
int32_t = int
int64_t = __WORDSIZE__ 가 64라면 long int 아니라면 long long int
출처: https://www.programmersought.com/article/66902704891/
이런 자료형은 모든 플랫폼에서 동일한 bit 수를 사용하게 된다 -> 이식성 UP
2. inerita matrix
math::inertiaMatrix(3.4543422e-05, -1.6031095e-08, -3.8375155e-07,
3.2689329e-05, 2.8511935e-08,
1.8850320e-05), 로봇 동작 방정식 내에서 관절 가속도 계수가 요소인 로봇 관성 행렬(robot inerita matrix)은 로봇 제어 설계에서 중요한 역할을 한다
3. convertRPYToRotationMatrix
math::convertRPYToRotationMatrix(0.0, 0.0, 0.0)
Eigen::Matrix3d robotis_framework::convertRPYToRotation Roll,Pitch,Yaw는 각각 x,y,z축 회전반경을 나타내며 이것을 회전행렬로 변환하는 것
이 코드들은 http://docs.ros.org/en/kinetic/api/robotis_math/html/namespacerobotis__framework.html#ab26f1f763573fd6d53fce871717274e0 에도 비슷한 코드들이 정리되어 있다
4. kinematics_ = new kinematics::SolverCustomizedforOMChain();
SolverUsingCRAndJacobian : public robotis_manipulator::Kinematics
SolverUsingCRAndSRJacobian : public robotis_manipulator::Kinematics
SolverUsingCRAndSRPositionOnlyJacobian : public robotis_manipulator::Kinematics
SolverCustomizedforOMChain : public robotis_manipulator::Kinematics복잡한 운동학 체인의 운동학 방정식을 분석적으로 풀게 도와주는 함수들
참고
http://docs.ros.org/en/kinetic/api/moveit_tutorials/html/doc/ikfast/ikfast_tutorial.html

쓸모 있을 개발자