[18주차]
TIL
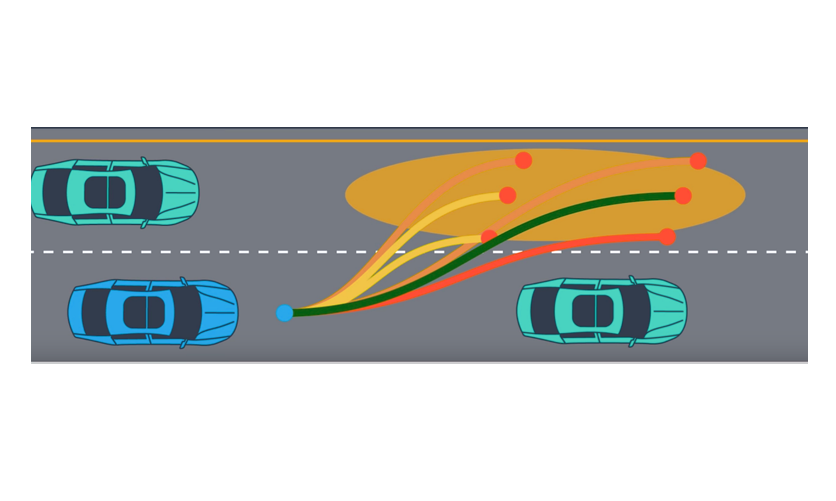
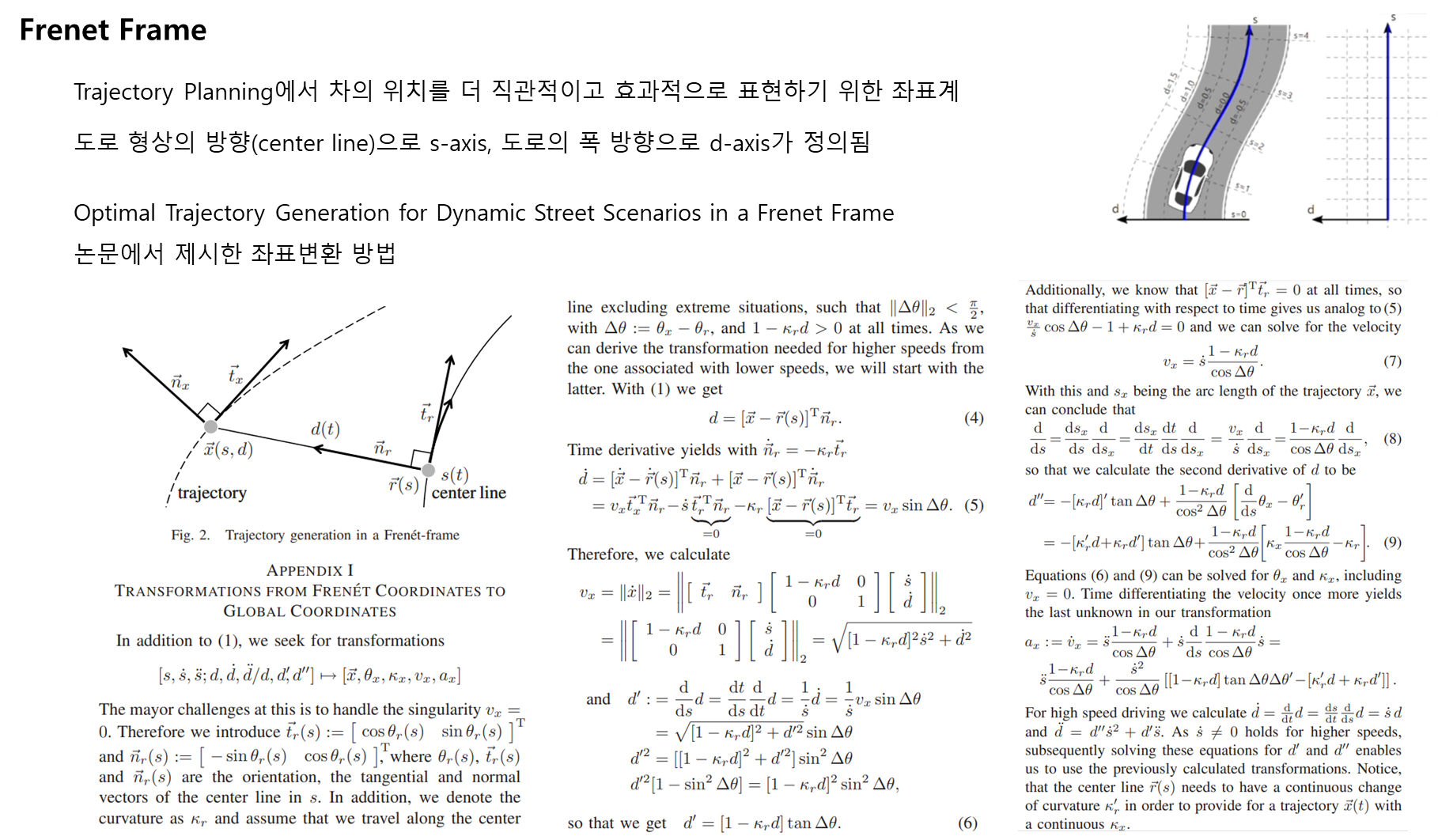
Frenet Frame
-
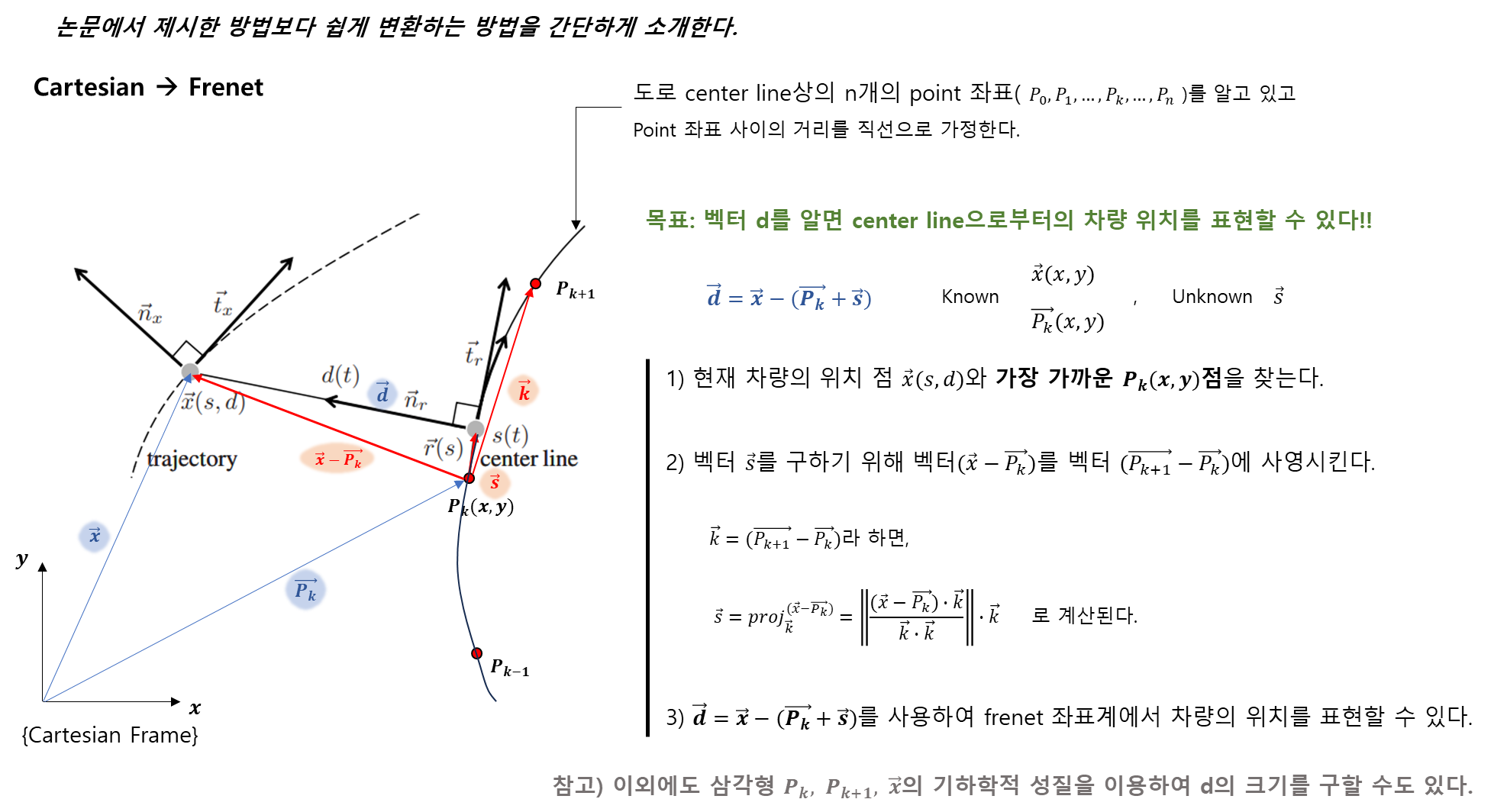
Cartesian -> Frenet
-
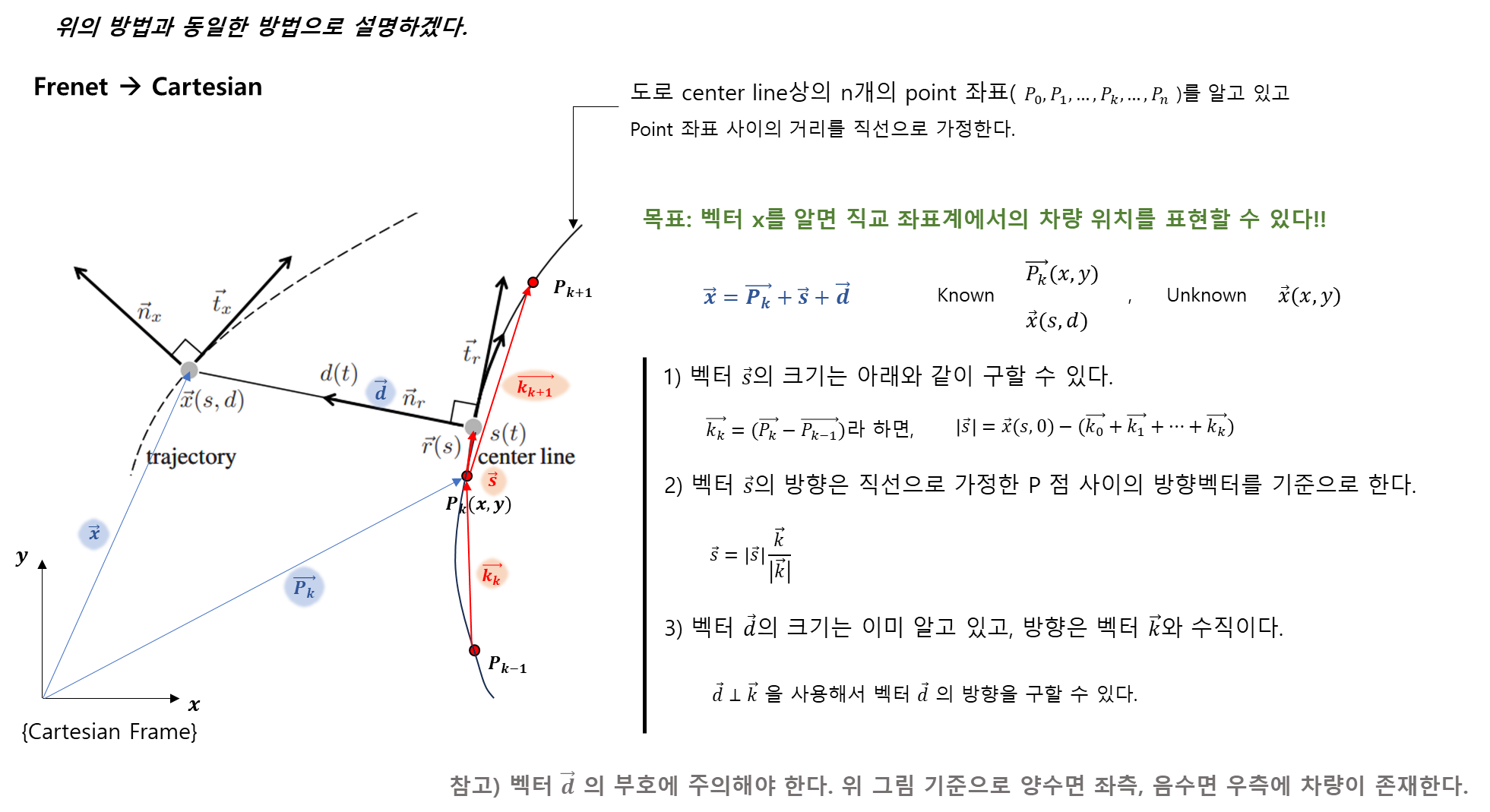
Frenet -> Cartesian
Optimal Trajectory Planning
-
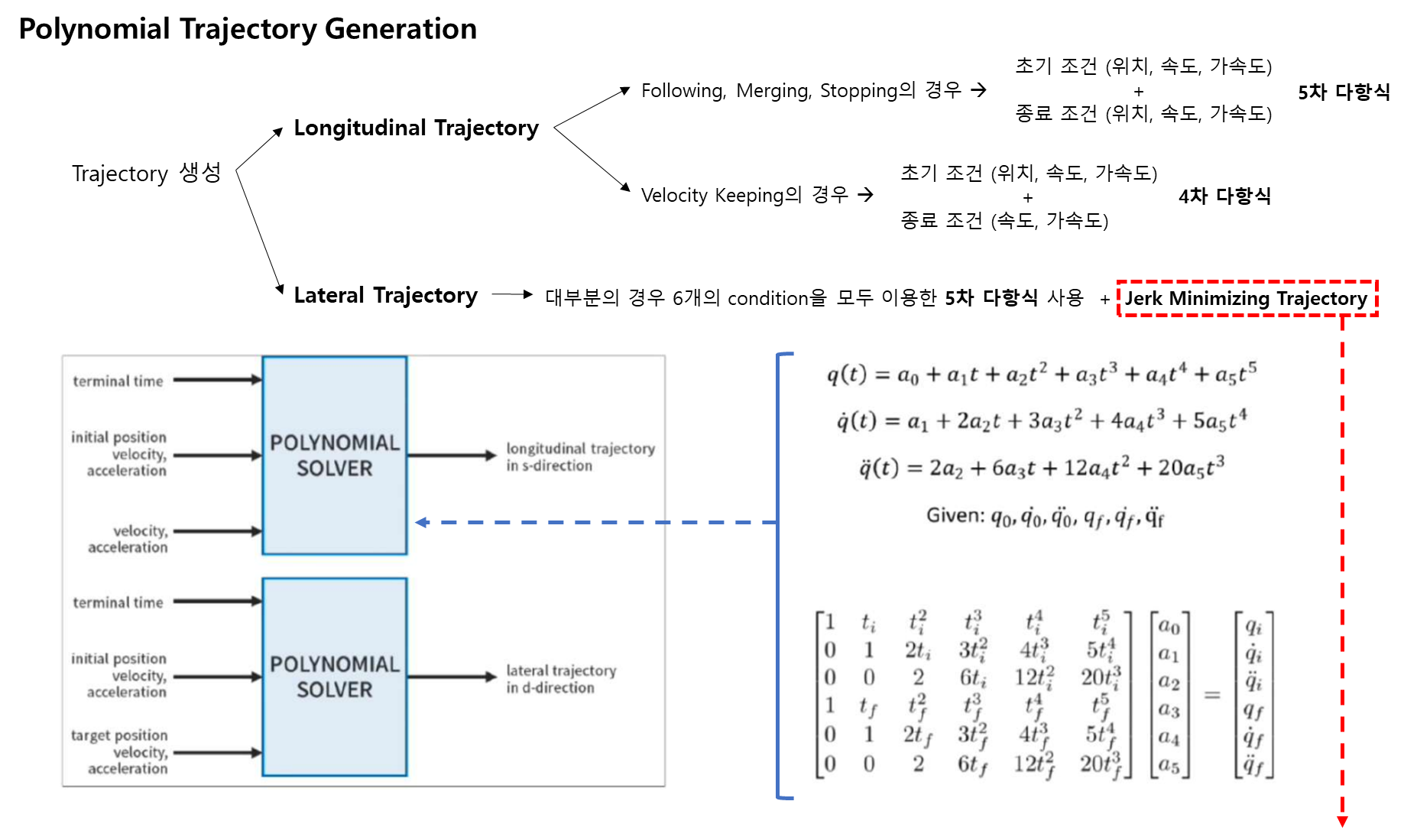
Polynomial Trajectory Generation
-
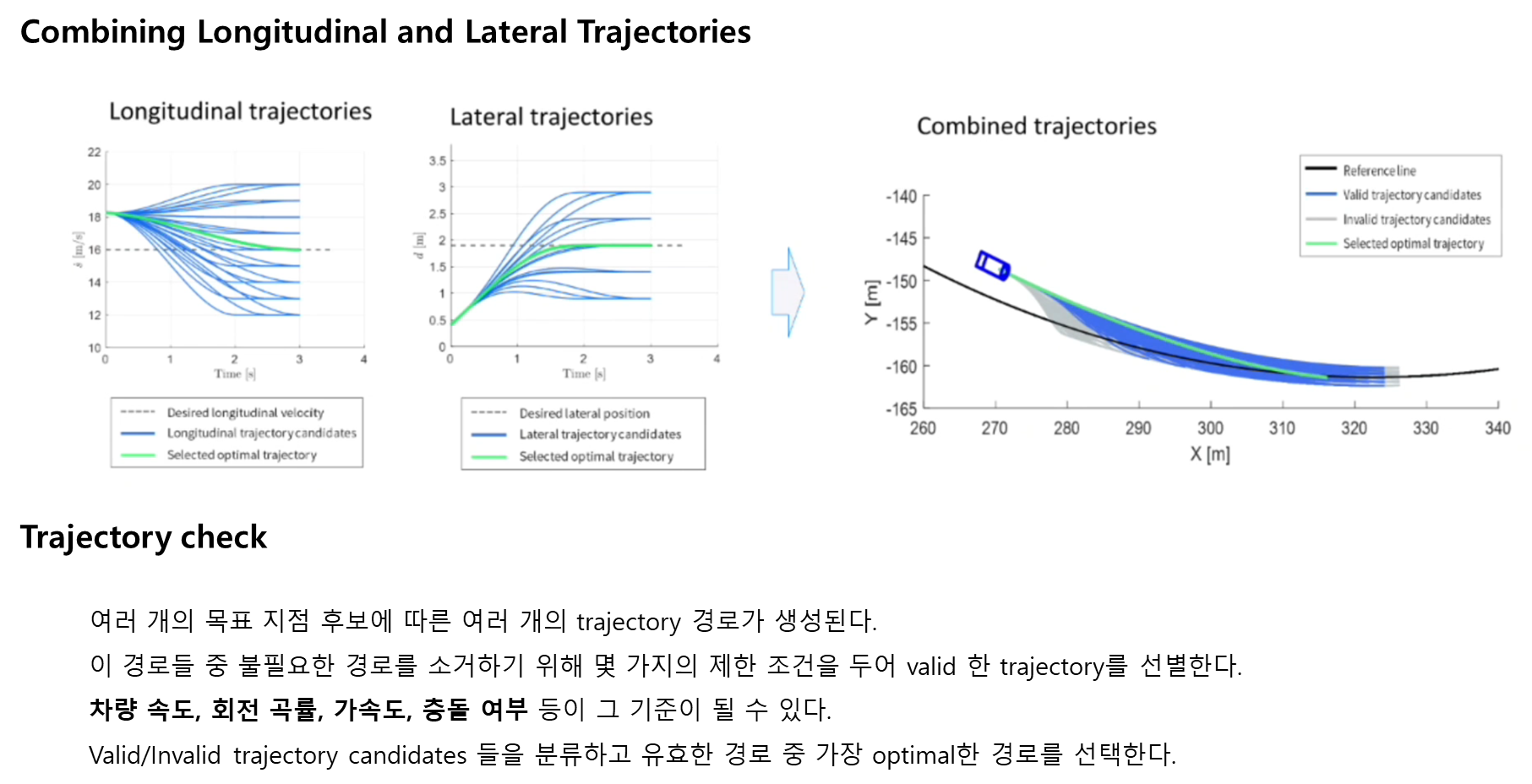
Combining Longitudinal and Lateral Trajectories
-
Trajectory check
-
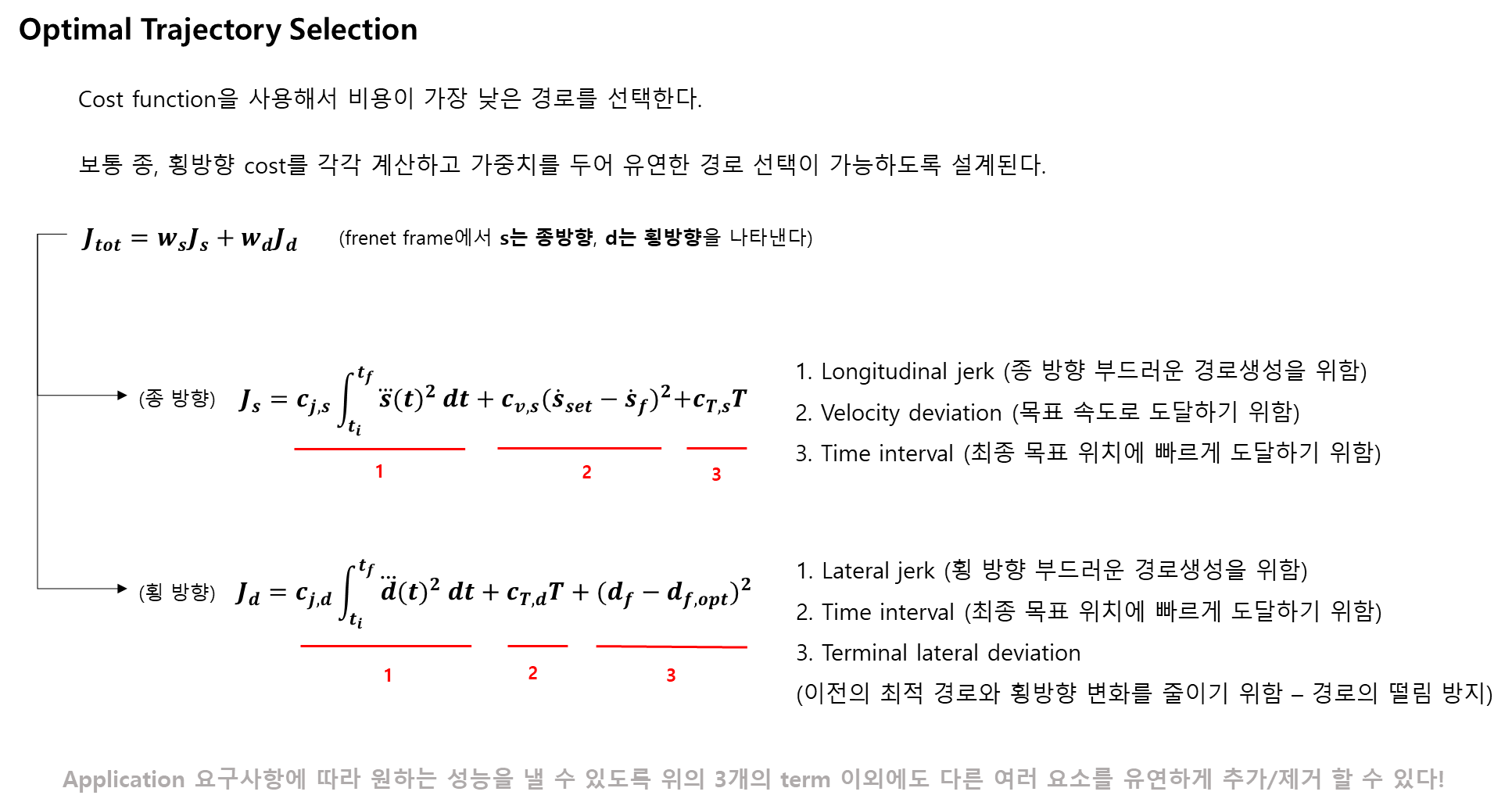
Optimal Trajectory Selection
Collision Check Algorithms
-
Using Apporoximation (Approximating as circles)
-
Exact Methods (Separating Axis Theorem)
MPC
18주차 skill set
1) Cartesian <-> Frenet 좌표계에 대한 이해와 변환을 할 수 있다.
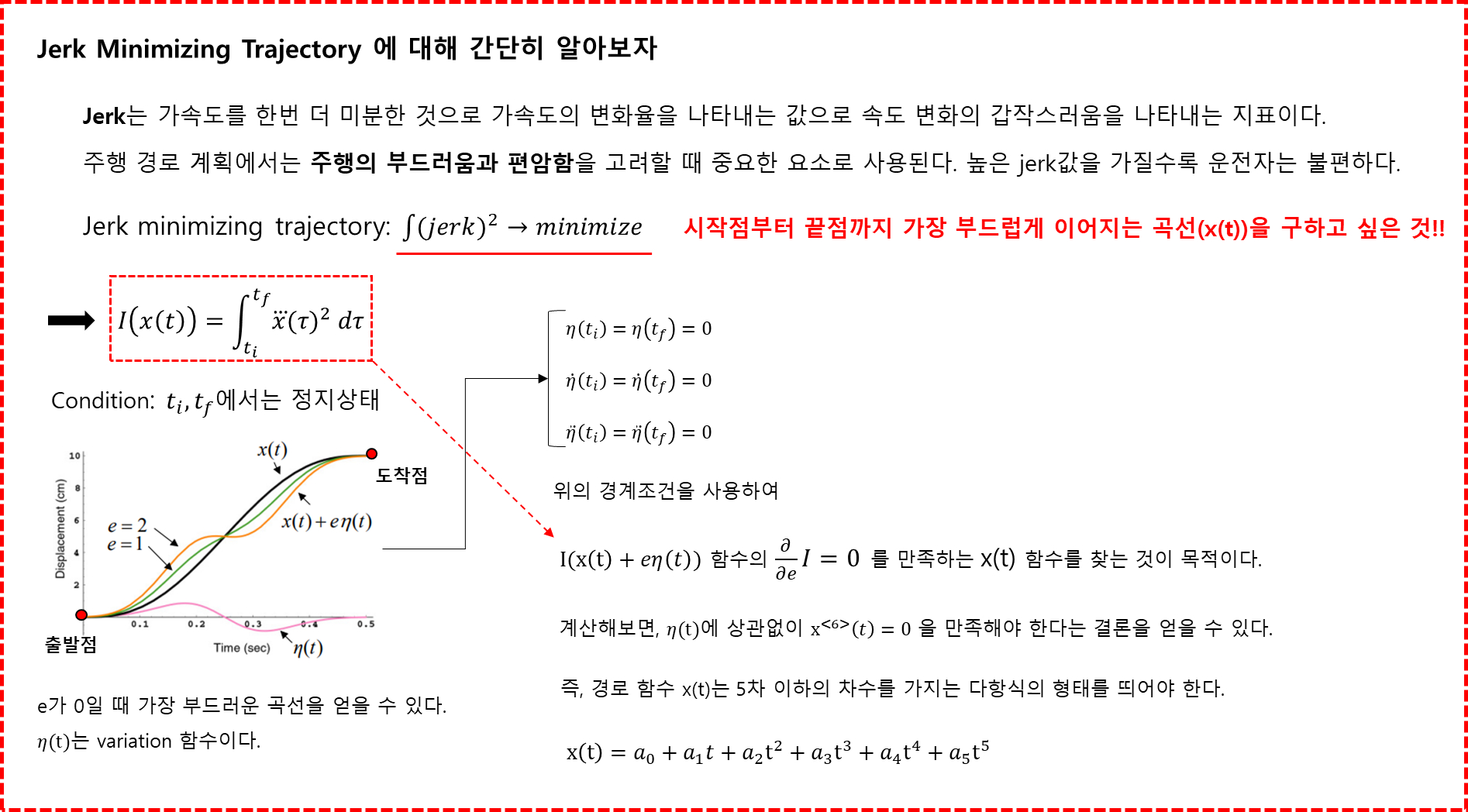
2) 5차 Polynomial을 사용하는 이유를 설명할 수 있다.
3) 종, 횡방향 Trajectory를 이해할 수 있다.
4) 충돌 확인 알고리즘의 두가지 방법을 설명할 수 있다.
5) MPC가 무엇인지 간략하게 설명할 수 있다.
학습내용
[1] Frenet Frame
[2] Optimal Trajectory Planning
1) Polynomial Trajectory Generation
2) Combining Longitudinal and Lateral Trajectories & Trajectory check
3) Optimal Trajectory Selection
[3] Collision Check Algorithms
[4] MPC
<출처>
(1) Programmers K-Digital-Training: 자율주행 데브코스 Planning & Control, Trajectory Planning
(2) Moritz Werling, et al. (2010). Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame. IEEE Conference on Robotics and Automation.

2개의 댓글

According to Phillips, no more than five such Deep Sea Special examples have ever been sold at a public level, so this fall’s auctions represent a rare opportunity for no more than two people (maybe one, if they’re nasty) to join http://2.59.132.109:3001/mblissradbertb a legitimately rare club that is able https://espritgames.com/members/48667659/ to say they own the primordial Submariner – one of the deepest, gnarliest, old-school-est, deepest-diving, thick as the day is long, building blocks of https://www.notebook.ai/users/1160969 one of the most widely known and respected companies in the world.
https://www.bark.com/en/us/company/bkellirohanas/17ORXR/
http://2.59.132.109:3001/hkersengallowayu
https://nhattao.com/members/user6834726.6834726/
https://www.google.com.tr/url?q=https://www.tanizegarki.pl/zenith.html
https://maps.google.com.ni/url?q=https://www.luksusfalskeure.com/Kollektion/bell-ross/
많은 도움이 되었습니다, 감사합니다.